一种电动飞机智能点阵变形机翼及设计方法
文献发布时间:2023-06-19 11:59:12
技术领域
本发明属于飞机机翼设计领域,具体涉及一种电动飞机智能点阵变形机翼结构及设计方法。
背景技术
电动飞机是未来绿色航空发展的必然趋势。它具有节能环保、高效低功耗、同时实现零排放,噪声和振动水平低等特点,是名副其实的环境友好飞机。电动飞机由于完全取消机翼内部的油箱,机翼内部则可以采用采用超轻点阵结构型式,进一步提高结构效率,降低重量。为了进一步提高电动飞机的机翼效率,机翼需要实现随飞行状态变化而自适应改变气动外形的能力。
发明内容
本发明的目的:本发明提出一种基于碳纳米管弹性基体复合材料柔性蒙皮和智能点阵结构的电动飞机变形机翼方案及设计方法。这种无油箱的机翼点阵结构与智能材料的结合可以有效的实现机翼结构变形,同时满足智能、超轻、适合未来4D打印等要求,极具应用前景。
本发明的技术方案:一方面,提供一种电动飞机的智能点阵变形机翼,包括翼盒、与翼盒两端连接的前缘和后缘;所述翼盒包括连接于上、下层柔性蒙皮内的点阵结构,点阵结构由多个单胞结构连接而成;智能作动器与单胞结构连接,用于驱动单胞结构变形。
可选地,所述单胞结构为可逆变形的框架结构。
可选地,所述单胞结构为可逆变形的八面体框架结构。
可选地,所述单胞结构和智能作动器一体化成型,智能作动器为单胞结构的连接杆。
可选地,所述单胞结构和智能作动器通过电机连接。
可选地,所述智能作动器选用形状记忆合金材料或压电堆栈材料中的一种或两种。
可选地,所述前缘和后缘选用金属材料或复合材料。
可选地,所述前缘和后缘为点阵结构。
可选地,所述柔性蒙皮选用包含碳纳米管弹性基体的复合材料。
另一方面,提供一种电动飞机的智能点阵变形机翼的设计方法,以如上所述的智能点阵变形机翼的轮廓为基础,对内部点阵结构拓扑和智能作动器布局进行优化,所述设计方法包括以下步骤:
步骤一:确定飞机机翼初始外形和目标外形
根据电动飞机飞行总体要求,将电动飞机最常用飞行工况所对应的最优气动外形作为初始外形,以该初始外形为基础,基于CST(class-shape Transformation,类别形状函数变换)的气动外形优化设计方法进行电动飞机其它飞行工况所对应的最优气动外形的优化,将其它工况对应的最优气动外形作为目标外形;
步骤二:确定点阵结构中单胞结构的胞元型式和智能作动器的智能驱动胞元型式
根据电动飞机机翼初始外形和目标外形,采用形函数解析方法进行机翼变形特点分析,将所述变形特点作为设计要求,采用经验方法或拓扑优化方法进行内部三维点阵结构胞元型式的确定;将点阵结构中单胞结构的某些杆元采用智能作动器替换,其中,智能作动器选用智能材料;根据所述变形特点,分析内部智能作动器的最优结构形式,以满足驱动自由度的要求;
步骤三、进行内部点阵结构快速离散、建立分析模型
以电动飞机目标外形为设计目标,以目标外形对应的初始外形为机翼结构初始外形面,进行变形机翼内部单胞结构的快速离散,并进行气动网格载荷与结构有限元网格载荷之间的转换,以建立点阵结构有限元分析模型;
步骤四:确定智能点阵变形机翼单胞尺寸及智能作动器的胞元分布
将点阵结构的单胞尺寸和智能作动器的位置作为优化设计变量,采用启发式优化算法对所述优化设计变量进行优化,建立集成智能材料的点阵变形机翼结构优化模型;
步骤五:智能点阵变形机翼结构可逆装配
以点阵结构的单胞结构为基础,采用嵌锁和螺栓连接的方式,进行点阵变形机翼结构的快速可逆装配,装配方式为通过人工或通过微型机器人进行精确装配;
步骤六:确定多组智能作动器的协同控制策略
以变形机翼点阵结构为对象,以至少一个目标外形为控制目标,将其中点阵结构的单胞结构作为控制执行组件,进行多组智能作动器之间的协同控制,并通过在蒙皮外表面贴智能皮肤传感器进行外形反馈,实现反馈控制;
步骤七:完成电动飞机变形机翼变形功能和强度试验
进行各个目标外形的变形功能试验,并将所实现的目标外形与步骤1确定的目标外形进行对比,验证设计方法的合理性和有效性;进行变形机翼的强度试验,验证其强度极限。
本发明的技术效果:第一,本发明方案的变形机翼结构方案能够实现分布式的变形控制,所有的驱动器能够独立协助进行驱动,可以产生任意所需的外形,可以较好的实现电动飞机机翼变形的要求;第二,本方案采用了超轻点阵结构设计思想,能够较好的解决未来电动飞机进一步节能减排的问题,可以较好满足绿色航空的发展需要;第三,该方案点阵结构和智能驱动器结构可以实现一体化4D打印,使结构真正实现智能化、一体化;第四,本方案采用碳纳米管弹性基体复合材料柔性蒙皮,可以实现大变形,解决变形与承载的矛盾,同时能够具备防除冰等功能,使变形机翼多功能化。
附图说明
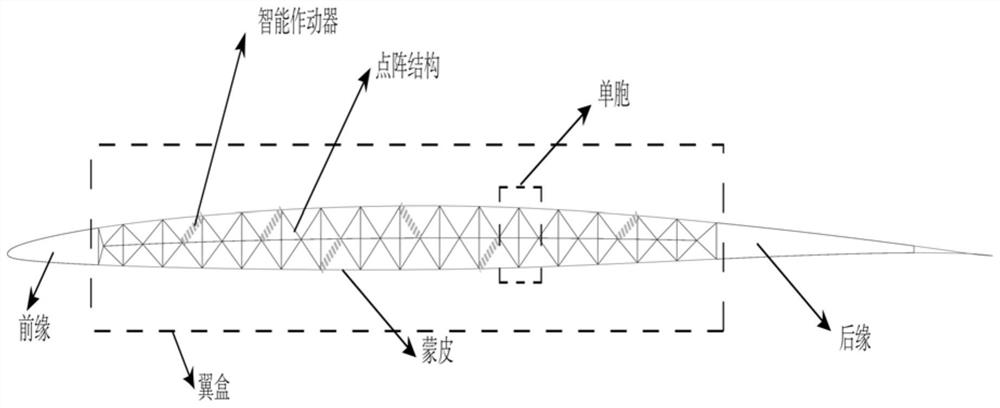
图1为电动飞机智能点阵变形机翼结构正视图;
图2为电动飞机智能变形机翼结构斜视图;
图3为变形前和变形后形状对比示意图。
具体实施方式
实施例1
本实施例,提供一种电动飞机智能点阵变形机翼结构,如图1和图2所示,电动飞机智能点阵变形机翼结构主要包括翼盒、与翼盒两端连接的前缘和后缘;所述翼盒包括连接于上、下层柔性蒙皮内的点阵结构,点阵结构由多个单胞结构连接而成;智能作动器与单胞结构连接,用于驱动单胞结构变形。本实施例,所述点阵结构具体为复合材料点阵结构。
其中,所述单胞结构为可逆变形框架结构,具体可以为可逆变形的八面体结构。单胞结构和智能作动器可以一体化成型,也可以通过电机与智能作动器连接。进一步地,智能作动器为智能材料组成,如形状记忆合金、压电堆栈或其它合适的智能材料。
此外,蒙皮为基于碳纳米管弹性基体的复合材料柔性蒙皮;前缘和后缘可以为金属材料或复合材料,采用点阵结构。
本实施例,单胞的数量在不同的维度可以有不同的数量,作为示意,图1中沿机翼厚度方向只有1层单胞,实际可以根据要求增加单胞的层数。智能作动器和点阵结构可以通过机械连接或者4D打印加工而成。
当智能作动器在激励的作用下产生位移时,整个变形机翼可以产生特定的变形。如图3示所示,方框线表示初始外形,圆点线表示所有智能作动器都产生了指定驱动位移后,机翼外形形成的轮廓。图3仅仅示意了厚度的变化,实际上该变形机翼还能产生扭转、变弯度等功能。根据变形功能要求的不同,各智能驱动器的位置和所需的驱动位移需要通过优化确定。
实施例2
本发明提出一种针对电动飞机的变形机翼结构实现方案与设计方法。整个实施步骤流程,概括起来如下所示:
1)、通过总体要求提供变形需求、承载要求和防除冰要求;
2)、进行复合材料智能点阵结构力学性能基础理论研究;
3)、进行电动飞机变形机翼智能点阵结构离散技术;
4)、进行复合材料智能点阵结构的智能组件拓扑优化、加工与装配;
5)、形成电动飞机智能点阵变形机翼,进行试验。
具体地,在进行多座的电动飞机智能点阵变形机翼结构设计时,以电动飞机机翼初始轮廓为设计基础,对内部点阵结构拓扑和智能作动器布局进行优化,所述设计方法包括以下步骤:
步骤一:确定飞机机翼初始外形和目标外形
根据电动飞机飞行总体要求(比如升阻比、升力系数、阵风减缓系数),将其最常用飞行工况所对应的最优气动外形作为初始外形,以该初始外形为基础,基于CST的气动外形优化设计方法进行电动飞机其它飞行工况所对应的最优气动外形的优化,将其它工况对应的最优气动外形作为目标外形,该目标外形至少两个。
步骤二:确定点阵结构中单胞结构的胞元型式和智能作动器的智能驱动胞元型式
根据电动飞机机翼初始外形和目标外形,采用形函数解析方法进行机翼变形特点分析,将该变形特点(如三维零泊松比)作为设计要求,采用经验方法或拓扑优化方法进行内部三维点阵结构胞元型式的确定。其次,将点阵结构中一些单胞结构的某些杆元采用智能作动器替换,由此构成的单胞结构作为智能驱动胞元,与其他普通单胞结构连接,共同组成点阵结构;其中,智能作动器为智能材料,如形状记忆合金等;根据变形特点,分析内部智能驱动胞元的最优结构形式,以满足驱动自由度的要求(如三个驱动自由度以上)。最终,上述复合材料点阵胞元结构的力学性能进行分析和试验验证,为后续点阵结构机翼分析提供力学性能特性参数。
步骤三:进行内部点阵结构快速离散、建立分析模型
以电动飞机目标外形为设计目标,以目标外形对应的初始外形为机翼结构初始外形面,进行变形机翼内部单胞结构的快速离散,通过程序自动实现。基于该快速离散程序,进行气动网格载荷与结构有限元网格载荷之间的转换。最终,以该自动化程序建立点阵结构有限元分析模型,作为后续优化设计的基础。
步骤四:确定点阵型变形机翼单胞尺寸及集成智能作动器的胞元分布
将点阵结构的单胞尺寸和智能作动器的位置作为优化设计变量,采用启发式优化算法对该两类变量进行优化,建立集成智能组件(或智能材料)的点阵变形机翼结构优化模型。
步骤五:点阵变形机翼结构可逆装配
以点阵胞元为基础,采用嵌锁和螺栓连接的方式,进行点阵变形机翼结构的快速可逆装配,该装配方式可以通过人工,也可通过微型机器人进行精确装配,实现批量生产。
步骤六:确定多组智能驱动胞元的协同控制策略
以上述设计给出的变形机翼点阵结构为对象,以目标外形(可以是多个)为控制目标,将其中点阵结构中集成智能作动器的单胞结构作为控制执行组件,进行多组智能驱动胞元之间的协同控制,并通过在蒙皮外表面贴智能皮肤传感器进行外形反馈,最终实现反馈控制。
步骤七:完成电动飞机变形机翼变形功能和强度试验
以上述设计结果为基础,进行各个目标外形的变形功能试验,并将所实现的目标外形与理论目标外形进行对比,验证设计方法的合理性和有效性。其次,针对上述点阵结构进行变形机翼的强度试验,验证其强度极限。
- 一种电动飞机智能点阵变形机翼及设计方法
- 一种固定翼垂直起降电动飞机的机翼结构及飞机