能实现六自由度调姿的可移动平台
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及重载条件下的多自由度装配对接和辅助装配设备领域,具体地涉及一种能实现六自由度调姿的可移动平台。
背景技术
在航天、轮船、电力等重型装配领域,其零部件的体积和质量较大,人工无法进行操作;在航天领域中,其工作环境不宜人工操作,因此在搬运和装配时需要可移动调姿平台的辅助。当前,常见的可移动平台均为轮式搬运车,只具有平面的移动功能,对于安装麦克纳姆轮的搬运车也只可以实现绕其负重平台法线转动的三个自由度,无法为零部件的调姿提供精准安装,不能进行快速调姿,在零件安装对接的过程中常常出现无法装配的问题。为解决现在存在的这些问题,技术人员将精准调姿平台与车体结合,在搬运车上安装多自由度的并联调姿平台,在装配时实现六自由度的调姿,从而实现精准装配,例如中国专利CN109231065A公开的一种基于全向移动模块的六自由度调姿系统。
在搬运车上安装多自由度的并联调姿平台,实现了搬运和装配时的六自由度调姿,但是因为增加了一个并联机构的高度,使整个搬运车的高度增加,可以满足一些较高位置的安装条件,但是对于一些低矮空间设备的安装和对接却无法适用。无论是搬运车还是并联调姿机构都存在着运动误差,二者在工作时所产生的运动误差相互累加,降低了移动调姿平台工作末端的运动精度,不能进行高精度的对接和装配。
发明内容
基于上述现有技术的不足,为了方便重载零部件的搬运安装,满足更多低矮工况,狭小空间的作业,并实现高精度的装配对接,本发明旨在提供一种整体结构紧凑,高度较低,可实现高精度的用于大型多自由度卫星装配的六自由度调姿平台。其通过设置六个UPS驱动分支,而且每一个驱动分支均设置有四边形杆组,该结构采用了二级增力机构,首先是将单根杆的P副改进为千斤顶的轴杆增力结构,这样使原来单根杆承担的负载由四根连杆组成的四边形轴杆结构承担,同等功率下分支能承受更大的承载力,更够有效的降低电机驱动所需的功率,承受更大的负载。
本发明采用的具体技术方案为:
本发明提供一种能实现六自由度调姿的可移动平台,其包括车体、行走装置以及调姿机构,所述车体包括车架、设置在所述车架底部的行走机构以及设置在车架四角处的支撑轮,车架同时作为调姿机构的上平台;
调姿机构包括下平台以及六个UPS驱动分支,下平台、六个UPS驱动分支以及车架共同组成调姿机构,其中,六个UPS驱动分支均匀分布在车架和下平台之间;每一个UPS驱动分支包括驱动电机、丝杠及丝杠螺母、U副、S副以及四边形杆组,每一个四边形杆组包括四个分支,四个分支分别为第一连杆、第二连杆、第三连杆和第四连杆,第一连杆、第二连杆、第三连杆和第四连杆之间借助于销轴相互连接组成四边形轴杆增力结构,所述第一连杆的第二端的端部连接所述U副的第二端,所述U副的第一端连接所述车架,所述第四连杆的第二端连接所述S副的第一端,所述S副的第二端连接所述下平台;
单个驱动分支在承受F
所述第一连杆的第一端、所述第四连杆的第一端、所述第二连杆的第二端和第三连杆的第二端借助于丝杠螺母连接在丝杠上,所述丝杠的一端连接所述驱动电机,驱动电机驱动丝杠进行直线运动,带动丝杠螺母运动,再由丝杠螺母带动连接在丝杠螺母两侧的四边形杆组的四个分支运动,从而带动第一分支和第四分支上连接的U副和S副运动,从而使车架和下平台移动,首先对下平台进行调整使下平台降落地面,当下平台降落在地面上时,继续对上部的车架进行调姿;
调姿完成后,六个UPS驱动分支均折起,下平台回收,车架下的支撑轮回收到车架里,通过电机驱动行走机构使整个车体进行全向移动。
优选地,所述车架的底部设置有支腿以及支撑卸载装置,在工作时,放下支撑轮和支撑卸载装置,能够帮助承担调姿平台上的工作载荷。
优选地,所述车架上方设置有吊环。
优选地,所述行走机构包括三个第一旋麦轮和三个第二旋麦轮,第一旋麦轮和第二旋麦轮分别设置在行走机构的两侧,第一旋麦轮和第二旋麦轮的旋转方向相反,多个旋麦轮在各自的电机的驱动下进行平面移动以及绕其载物平台法线的全向移动。
优选地,所述车架底端两侧分别设有三个用于安装旋麦轮的凹槽,三个凹槽分别设置在车架的两端及中间位置。
与现有技术相比,本发明的效果如下:
(1)本发明将调姿平台作为搬运车架,并在其上安装麦克纳姆轮,既能实现全向移动的搬运功能,又实现了低矮工况和狭小工况下的装配应用,同时避免了两个机构的误差积累,提升了误差精度。
(2)本发明的整体结构紧凑,高度较低,可实现高精度的用于大型多自由度卫星装配的六自由度调姿平台。在整体机构中Stewart并联机构嵌入进行走装置中,将行走机构的车架作为上平台,更大的节省了空间,满足低矮工况和狭小工况下的装配应用,同时避免了两个机构的误差累积,提升了误差精度。
(3)相比于传统的UPS分支,改进后的UPS驱动分支能够起到更好的增力效果。该结构采用了二级增力机构,首先是将单根杆的P副改进为千斤顶的轴杆增力结构,这样使原来单根杆承担的负载由四根连杆组成的四边形轴杆结构承担,改进后的驱动分支在承受同等载荷时,单个分支所承受的力为
(4)原有UPS驱动分支的驱动传动结构与杆长方向一致,占用高度空间过大。而改进的UPS分支将纵向的驱动传动结构与杆长方向呈特定夹角布置,减少高度空间占用,增加有效行程,在保持工作空间不变的前提条件下,降低平台整体高度。
附图说明
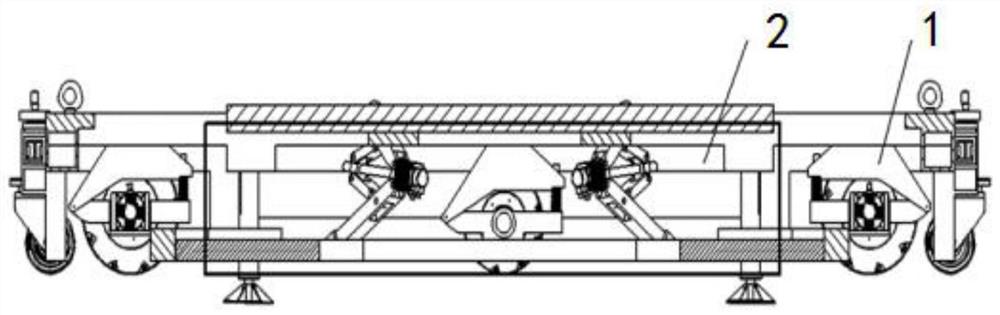
图1为本发明的整体主视图;
图2为本发明的整体效果图;
图3为本发明的侧视图;
图4为图3的CC剖视结构示意图;
图5为本发明的主视图;
图6为本发明的俯视图;
图7为调姿机构的效果示意图;
图8为调姿机构的主视结构示意图;
图9为UPS驱动分支的效果示意图。
图中部分附图标记如下:1、车体,2、调姿机构,11、第一旋麦轮,12、第二旋麦轮,13、车架,14、支撑轮,15、支撑卸载装置,16、吊环,17、支腿,111、第一旋麦轮驱动系统,112、第二旋麦轮驱动系统,121、第一旋麦轮驱动装置,122、第二旋麦轮驱动装置,21、下平台,23、UPS驱动分支;231、U副,232、四边形杆组,233、S副,234、丝杠;235、丝杠螺母,236、驱动电机;2321、第一连杆,2322、第二连杆,2323第三连杆,2324第四连杆。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。
本发明实施例的一种可实现六自由度调姿的可移动平台,其中包括车体1以及调姿机构2,车体1上设置有车架13,车架13为机构提供安装基准,同时,车架13作为调姿机构2的上平台使用。
如图1和图2所示,车架13为整体机架,车架13底端两侧设有凹槽,每侧各三个,中间一个两角各一个,车架13每侧各装有三个第一旋麦轮11与第二旋麦轮12,对面的两个麦轮旋向不同。车架13作为UPS并联平台的上平台,下面均匀安装了六个UPS驱动分支23,分支下端为下平台21。
如图3,图4,图5所示,车架13为狭长结构,在第一旋麦轮11与第二旋麦轮12外侧,车架的四个角处装有四个支撑轮14连接车架13,因车体狭长容易侧翻,四个支撑轮14可以拉出增加狭长车体的宽度,使机构使用时更加稳定,防止侧翻。在车架13宽度方向上装有支撑卸载装置15,麦克纳姆轮不能长时间承受重载,在工作时,将会放下支撑轮14和支撑卸载装置15,帮助承担调姿平台上的工作载荷。车架上方装有吊环16,方便整个调姿系统的搬运。
如图6,图7,图8,图9所示,调姿机构2由下平台21,六个UPS驱动分支23,以及车架13作为上平台组成,其中六个UPS驱动分支23均匀分布在13上平台与下平台21之间;其中UPS驱动分支23包括驱动电机236、丝杠234及丝杠螺母235、U副231、S副233和四边形杆组232。
单个驱动分支在承受F
由下至上连接顺序为:下平台21连接S副233,由S副233连接连杆2324,连杆2324通过四边形杆组232由丝杠螺母235连接在丝杠234上,丝杠234一端连接驱动电机236,四边形杆组232中第一连杆2321另一端连接U副231,U副231连接车架13上平台。由驱动电机236驱动丝杠234进行直线运动,带动丝杠螺母235运动,再由丝杠螺母235带动连接在螺母两侧的第二连杆2322与第三连杆2323运动,由于四个杆件形成了四边形轴杆增力结构,两个连杆的运动带动四边形四条边的运动,从而带动另外两条连杆上连接的U副231和S副233运动,因为车架13即为调姿机构的上平台,所以UPS驱动分支23带动下平台21移动,下平台21降落在地面上时,对上平台及车架进行调姿。
调姿完成后,运动调姿平台在运动过程中,UPS驱动分支23收起,调姿平台2的下平台21回收,车架13下的支腿收回,支撑轮14与支撑卸载装置15也回收到车架里,三个第一炫麦轮以及第一旋麦轮驱动装置121组成第一旋麦轮驱动系统111,三个第二炫麦轮以及第二旋麦轮驱动装置122组成第二旋麦轮驱动系统112,通过第一旋麦轮驱动系统112和第二旋麦轮驱动系统122使整个车体进行全向移动,起到搬运车的作用;在承受较大负载时,车架13结构为长方形容易侧翻,且第一旋麦轮11与第二旋麦轮12无法承担过大重量,及放下支撑轮14,帮助承担负载,并且增加横向宽度,增加稳定性防止侧翻。运动调姿平台在静止工作过程中,主要完成装配任务,放下支腿以及支撑卸载装置15作为支撑,由驱动电机236驱动UPS驱动分支23,使调姿机构2的下平台21向下移动,直到下平台21接触地面,并稳定在地面上,由调姿机构的下平台21支撑整个装置,调节支撑卸载装置15辅助支撑。稳定之后,进行装配工作,由驱动电机236驱动UPS驱动分支23进行调姿,对上平台上需要安装的部件进行稳定的精准安装。
相比于传统的UPS分支,改进后的UPS驱动分支能够起到更好的增力效果。该结构采用了二级增力机构,首先是将单根杆的P副改进为千斤顶的轴杆增力结构,这样使原来单根杆承担的负载由四根连杆组成的四边形轴杆结构承担,改进后的驱动分支在承受F
以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 能实现六自由度调姿的可移动平台
- 一种六自由度调姿平台