一种塔机回转进程状态控制方法
文献发布时间:2023-06-19 12:05:39
技术领域
本发明涉及塔式起重机施工监测与控制技术领域,具体涉及一种一种塔机回转进程状态控制方法。
背景技术
在我国社会化水平不断提升的过程中,塔式起重机的应用也比较普遍。而在塔式起重机应用过程中,可能会存在运行安全以及故障维修问题,塔式起重机一旦出现故障会对施工进度产生一定影响,并且可能会导致施工风险增加,严重威胁人们的生命财产安全。由于塔机工作具有自身的特殊性,一方面在工作的过程中其运行状态和载荷都不断的发生变化,从而会对起重机的各个构成部分不断的造成冲击,对塔机使用寿命造成不利影响。另一方面,塔机由于吊载不同,吊装速度不同等因素引起的塔机整体振动,若振动幅度过大,会导致塔机安全事故的发生。所以,现在塔机使用过程中的主要安全问题在于塔机吊载和速度的控制问题方面。
基于上述因素,需要准确获取控制塔机过程中,塔机个结构部分及电气系统的工作响应情况,并针对响应数据对塔机进行控制,保障塔机在吊载过程中的安全,这对塔机在设计过程中的优化处理和生产中的工艺制定具有很重要的意义。
发明内容
本发明的目的在于提供一种一种塔机回转进程状态控制方法能够对塔机回转过程进行状态监测与智能控制,对该过程中出现的危险状态进行有效地管控,保障塔机安全作业,实现塔机的智能化。
为实现上述目的,本发明采用了以下技术方案:
一种塔机回转进程状态控制方法,该方法包括以下步骤:
(1)位姿感知
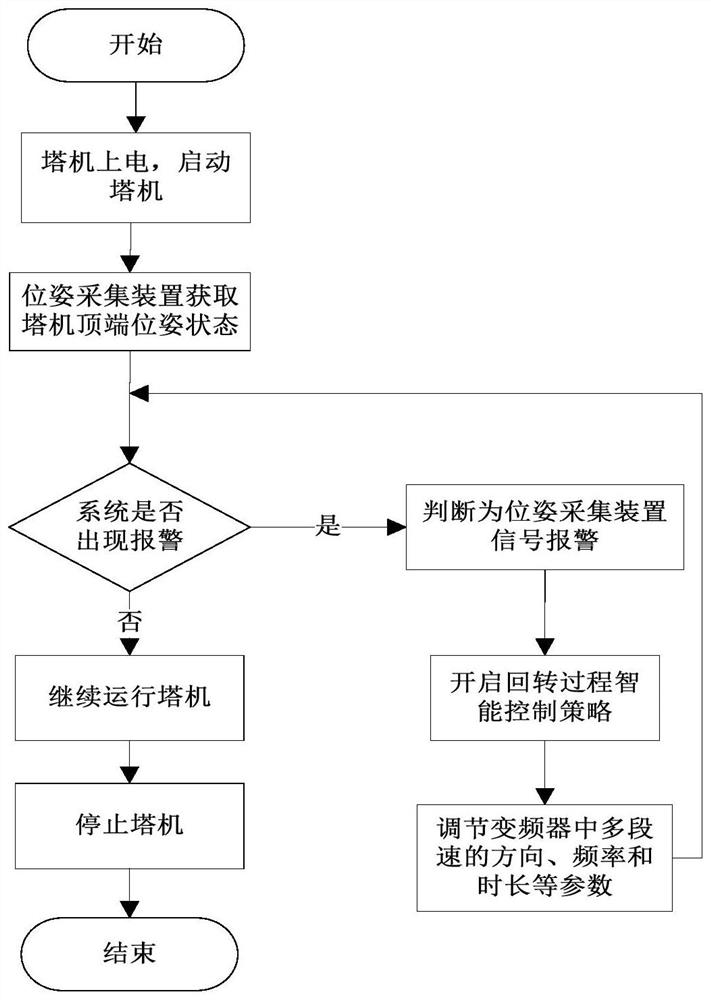
塔机上电启动后,采用位姿感知装置实时获取塔机顶端的位姿信息,并依据所设定的安全阈值范围判断塔机振动偏移是否安全,在监测到位姿信号超出安全范围时,系统就会发出报警信号,并进行回转过程控制;通过判断塔机振动加速度方向和修改变频器有关速度方向、频率、时间控制的相关参数,对塔机动作进行干涉,以达到减小塔机振动的目的。
(2)动力学模型建立
在塔机回转过程中,建立塔机回转过程中的动力学模型,建立坐标系如下:以塔机回转支撑平面与塔身轴心线的交点作为坐标系的原点O,以塔机起重臂上且远离塔身的方向为X轴正方向,以塔身轴心线垂直于地面向上方向为Z轴正方向,Y轴垂直于X、Z所围成的平面,坐标轴Y正方向为垂直于起重臂轴线方向且与X、Z轴符合右手螺旋法则;将塔机塔身看作一个一端固定在地面,另一端自由的悬臂梁。
回转过程中,假设塔身顶端沿X、Y轴的位移量分别为δ
其中,F
(3)回转进程控制
设定塔机回转加速度沿X轴方向为ε(x),沿Y轴方向为ε(y),获取塔机振动方向,通过控制塔机电气系统,修改变频器控制回转动作的相关参数,为塔机施加一与塔机振动方向相反的反向驱动力,使塔机振动方向与塔机加速度方向沿X轴或Y轴相反,以达到抑制塔机顶端振动的情况,保障塔机稳定运行。
由上述公式可知,塔机回转过程中,影响塔机振动方向的参数为Fx、Fy、Mx、My的方向;当(2F
和现有技术相比,本发明的优点为:
(1)本发明在传统的塔机基础上,运用塔机安全状态监测、塔机电控系统监测管理视频监测、远程传输控制及智能反馈控制等先进技术,旨在实现塔机的数字化和智能化,保障塔机安全作业。
(2)本发明的创新点在于,通过建立塔机动力学模型,分析塔机在进行回转动作时,塔机顶端位姿状态的影响因素和变化规律,计算得到在无噪声的理想状态下塔机顶端位移变化的轨迹特征,并根据顶端位移变化规律设计塔机顶端位移变化的安全阈值范围。为保证塔机顶端位移变化在安全范围内,基于塔机顶端位姿获取装置获取塔机顶端的位姿变化情况,并通过调节塔机的回转加速度,在塔机顶端振动剧烈的时候,通过改变加速度方向和大小来减缓塔机顶端振动强度,使塔机趋向平稳运动。
(3)本发明目的是为解决目前塔机进行吊载操作不规范引起的塔机振动偏移过大,加速塔机磨损,减少塔机的使用寿命,使塔机存在很大的安全隐患的问题。通过智能调节塔机控制加速度,减小塔机不规范操作对塔机安全性的影响,保障塔机振动偏移在安全范围内,使塔机安全作业的同时也规范了塔机操作的正确性。
(4)本发明的关键技术在于塔机顶端位姿变化特征的获取与预测,根据预测塔机顶端运动规律调整回转加速度,达到减小顶端振动的目的。在因回转操作控制不当时对塔机回转动作进行干涉控制,以减小甚至消除塔机出现的危险状态,保障塔机工作效率的同时为塔机提供安全保障,极大地提高塔机工作的安全性和智能化水平。
附图说明
图1是本发明的方法流程图;
图2是本发明所基于的控制系统的原理框图;
图3是塔机受力和弯矩的变形模型。
其中:
100、电气系统监控终端主机,110、5G通讯模块,120、GPS定位天线;210、安全状态监测主机,221、位姿感知装置,222、幅度传感器,223、回转传感器,224、重量传感器,225、风速传感器,226、高度传感器;300、塔机回转动作动态控制单元;400、显示屏;500、远程管理平台。
具体实施方式
下面结合附图对本发明做进一步说明:
如图1所示的本发明所述的塔机回转进程状态控制方法,是基于图2所示的控制系统来实现的。该控制系统包括电气监测及远程调试单元、塔机运行状态监测单元、塔机回转动作动态控制单元和显示屏。
具体地说,所述电气监测及远程调试单元包括电气系统监控终端主机100、远程管理平台500、PLC控制器、起升变频器、变幅变频器和回转变频器;所述电气系统监控终端主机内设有5G通讯模块110。所述塔机运行状态监测单元包括安全状态监测主机210、位姿感知装置221、幅度传感器222、回转传感器223、重量传感器224、风速传感器225和高度传感器226;所述电气系统监控终端主机100和安全状态监测主机210均与位于司机室内的显示屏400相连。
所述塔机运行状态监测单元,通过位姿感知装置221和各个传感器,实时采集塔机高度、幅度、回转角度、起升重量、起重力矩、风速和塔机顶端倾角变化等相关数据。所述高度传感器,用于采集塔机高度。所述幅度传感器222,用于采集变幅小车位移。所述重量传感器224,用于采集塔机起吊物重量。所述回转传感器223,用于采集塔机回转角度。所述风速传感器225,用于采集塔机周围的实时风速情况。所述高度传感器226,安装在塔机卷扬机处,用于采集塔机高度。所述幅度传感器222,安装在塔机塔机变幅机构处,用于采集变幅小车位移。所述重量传感器224,安装在起升导向轮处,用于采集塔机起吊物重量。所述回转传感器223,安装在塔机平衡臂上,用于采集塔机回转角度。所述风速传感器225,安装在塔机平衡臂上,用于采集塔机周围的实时风速情况。所述位姿调整装置221,用于采集塔机塔身顶端的位姿变化的状态数据,通过建立塔身钢结构完好状态刚度空间模型,在模型坐标系x’,y’,z’内划定塔机顶端安全位移区域,在塔机出现前倾,后倾和侧向倾斜不同状态时,位姿感知装置采集塔机不同状态的位姿点,规定塔机塔身顶端端点坐标(x,y)在划定的安全位移区域之内,则判定为塔机处于安全状态;塔机塔身顶端端点坐标(x,y)在划定的安全位移区域之外,则判定为塔机处于危险状态。在塔机上电启动后,位姿感知装置可以实时获取塔机顶端的位姿信息,并依据所设定的安全阈值范围判断塔机振动偏移是否安全,在监测到位姿信号超出安全范围时,系统就会发出报警信号并自动开启回转过程智能控制策略,通过判断修改变频器有关速度方向、频率、时间控制的相关参数,减小塔机动作加速度,对塔机动作进行干涉,以达到减小塔机振动的目的。
所述电气系统监控终端主机100,用于接收起升变频器、变幅变频器和回转变频器采集的塔机电气状态信息,并通过5G通讯模块将数据传输到远程管理平台,同时将数据在显示屏上显示。所述安全状态监测主机210,用于接收处理位姿感知装置及各传感器采集到的塔机运行状态信息,并与远程终端监控主机相连,通过5G通讯模块将数据传输到远程管理平台,同时将数据在显示屏上显示。
所述电气系统监控终端主机100包括以下通讯接口:1路电源接口,采用接线端子接入DC24V电源,使用电控柜现有开关电源。4路RJ45接口,采用接线端子分别与PLC、变频器通讯。1个GPS天线接口,采用SMA接口外接GPS天线。1个远程天线接口,采用SMA接口外接远程传输天线。所述电气系统监控终端主机采用卡轨式固定方式,安装在电控柜内的卡轨上。
所述塔机回转动作动态控制单元,根据电气监测及远程调试单元和塔机运行状态监测单元采集的塔机状态数据,判断塔机的工作状态和安全状态,在监测到塔机回转动作过程中存在安全风险时,为塔机提供一种控制塔机回转动作的控制方法,保证塔机平稳运行。
进一步的,所述电气系统监控终端主机100连接有GPS定位天线120。
进一步的,所述电气系统监控终端主机100和安全状态监测主机210均通过有线方式与显示屏400相连。电气系统监控终端主机100和安全状态监测主机210通过数据线相连。安全状态监测主机210将采集到的塔机运行状态数据发送给电气系统监控终端主机100,由电气系统监控终端主机100发送给远程管理平台500。
进一步的,所述电气系统监控终端主机100安装在塔机电控柜内。电气系统监控终端主机100的主要实现的功能包括:起升、回转、变幅变频器数据监测及远程传输、PLC数据通讯及远程传输、北斗/GPS定位、二维码功能和远程开关机功能,并且可以基于平台,对变频器相关参数进行修改。所述起升、回转、变幅变频器数据监测及远程传输是对塔机变频器中的起升、回转、变幅接口数据进行实时监测并接入远程管理平台,远程管理平台通过远程传输将各变频器中的电压、输出频率、电机电压、电机电流、电机功率等数据远程传输到显示屏上,并且可以基于平台,对变频器相关参数进行修改。所述PLC数据监测及远程传输是将电气监测及远程调试单元中的PLC输入和输出状态进行获取及远程传输,在显示屏上进行展示。所述远程开关机功能是远程管理平台能够远程控制塔机的使用状态(使用或停用)、设置塔机到期使用时间。
进一步的,所述显示屏400安装在司机室内,用于显示电气监测及远程调试单元、塔机运行状态监测单元所采集参数,包括但不限于:实时采集到的:塔机高度、塔机幅度、塔机起升重量、塔机起重力矩、风速和电气系统相关数据。
进一步的,所述远程管理平台500可以在微信小程序、手机端和PC端使用。所述远程管理平台500,用于储存塔机实时状态参数;用于储存塔机变频器状态参数;用于储存PLC状态参数;用于储存设备位置信息;同时储存来自塔机安全监控系统塔机独立运行时超出安全阈值的报警数据;修改变频器参数;具有访问权限的用户通过网络登录塔机在线监控平台实时查看塔机视频影像。
如图1所示的塔机回转进程控制方法,该方法可以在塔机回转过程中控制塔机,限制回转的加速度来减小塔机顶端振动情况,保障塔机安全。采用位姿感知装置获取塔机在回转过程中获取塔机顶端的位姿变化数据,当位姿变化超出所设定的安全阈值范围时,系统将会发出报警提醒,同时自动开启智能控制策略,获取塔机振动方向,判断塔机振动加速度方向,通过控制塔机电气系统,修改变频器控制回转动作的相关参数,为塔机施加一与塔机振动方向相反的反向驱动力,使塔机振动方向与塔机加速度方向在沿X轴或Y轴相反,以达到抑制塔机顶端振动情况,保障塔机稳定运行。
在塔机回转过程中,建立塔机回转过程中的动力学模型,为表述方便,建立坐标系如下:以塔机回转支撑平面与塔身轴心线的交点作为坐标系的原点O,以塔机起重臂上且远离塔身的方向为X轴正方向,以塔身轴心线垂直于地面向上方向为Z轴正方向,Y轴垂直于X、Z所围成的平面,坐标轴Y正方向为垂直于起重臂轴线方向且与X、Z轴符合右手螺旋法则。
将塔机塔身看作一个一端固定在地面,另一端自由的悬臂梁,认为塔身为一个均质弹性体。一方面:塔机自重载荷包括塔机金属结构自重,机械设备自重,电器设备自重以及附设在塔机上的其他装置重量等一系列载荷对塔身产生向下的压力F0和由偏心力引起的弯矩M作用在它身上;另一方面,塔机回转过程中,产生的回转惯性力也会作用在塔身上,引起塔身变形。回转过程中,假设塔身顶端沿X、Y轴的位移量分别为δ
式中:Fx为在回转过程中,起重臂和平衡臂产生的沿着X轴的回转惯性力;Fy为在回转过程中,起重臂和平衡臂产生的沿着Y轴的回转惯性力;Mx为塔身上部集中质量对塔身产生的沿着X轴的弯矩;My为塔身上部集中质量对塔身产生的沿着X轴的弯矩,H为塔身高度,E为塔身材料的弹性模量;I为塔身截面的惯性矩。
由上述公式可知,塔机回转过程中,影响塔机振动方向的参数为Fx、Fy、Mx、My的方向。
设定塔机回转加速度沿X轴方向为ε(x),沿Y轴方向为ε(y),当(2F
位姿感知装置获取塔机在回转过程中获取塔机顶端的位姿变化数据,当位姿变化超出所设定的安全阈值范围时,系统将会发出报警提醒,同时自动开启智能控制策略,获取塔机振动方向,系统可以通过控制塔机电气系统,修改变频器控制回转动作的相关参数,为塔机施加一与塔机振动方向相反的反向驱动力,使塔机振动方向与塔机加速度方向在沿X轴或Y轴相反,以达到抑制塔机顶端振动情况,保障塔机稳定运行。
本发明通过电气监测及远程调试单元和塔机运行状态监测单元获取到塔机回转过程中的状态数据,运用这些实时数据分析判断塔机安全状态并通过塔机回转动作动态控制单元对塔机回转进程进行动态控制,保证塔机回转过程中运行的平稳性。本发明可以对塔机的运行状态包括电气系统状态进行检测,并基于通讯技术将检测数据上传到远程管理平台,同时可以借助手机APP、微信小程序等对电气系统中的变频器参数根据工作需要进行远程修改。此外,本发明还为塔机提供一种在回转动作时的控制策略,可以减小塔机在回转过程中的顶端振动情况。此外,为适应建筑施工现场工况的复杂性,本发明为塔机提供了慢就位模式、高效模式和智能控制模式。所述慢就位模式是让塔机以低速档位进行动作;所述高效模式是让塔机以高速档位进行动作;所述智能控制模式是根据吊物重量、吊物起止点位置、现场风速等因素为塔机智能选择一种档位控制方案,进行吊装工作。所述三种模式皆要遵循塔机回转动作动态控制方法,保障塔机安全运行。三种不同的操作模式可以根据现场施工需求来提供,能够保证塔机安全高效的进行作业。
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 一种塔机回转进程状态控制方法
- 一种低成本塔机用回转控制系统及控制方法