一种洗碗机控制电路、洗碗机及洗碗机控制方法
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及洗碗机控制技术领域,尤其涉及一种洗碗机控制电路、洗碗机及洗碗机控制方法。
背景技术
洗碗机是自动清洗碗、筷、盘、碟、刀、叉等餐具的设备。在市面上的全自动洗碗机可以分为家用和商用两类,家用全自动洗碗机只适用于家庭,主要有柜式、台式、水槽一体式及集成式。
而如今在智能家居的大背景下,对于洗碗机所要具备的功能也变得越来越多,随之而来的就是对于洗碗机各个功能的集中控制与调节问题。
发明内容
本发明要解决的技术问题在于提供一种一种洗碗机控制电路、洗碗机及洗碗机控制方法,用以解决洗碗机精确控制调节的问题;
为了实现上述目的,本发明采用的技术方案为:
一种洗碗机控制电路,包括:控制模块、动作执行模块、传感检测模块和电源模块;
动作执行模块和传感检测模块都与控制模块连接;
控制模块用于通过预设指令向动作执行模块发送控制信号,动作执行模块用于根据控制模块的控制信号执行相应的动作,传感检测模块用于洗碗机中的水位检测及温度检测,电源模块用于输出电源转化为预设电压为动作执行模块和控制模块供电;
所述控制模块包括:控制芯片U1、信号转换芯片U7和晶振电路;
所述控制芯片U1的第六引脚和第七引脚通过信号转换芯片U7向动作执行模块发送加热信号,控制加热丝进行加热;控制芯片U1的第八引脚通过信号转换芯片U7向动作执行模块发送负载开关信号,控制洗碗机各个负载的工作状态;控制芯片U1的第九引脚通过信号转换芯片U7向动作执行模块发送超声波控制信号,控制超声波发生装置进行工作;控制芯片U1的第十引脚通过信号转换芯片U7向动作执行模块发送进水信号,控制洗碗机进水阀的工作状态;控制芯片U1的第二十九引脚和第三十引脚通过信号转换芯片U7向动作执行模块发送排水信号,控制排水阀的开关状态;
控制芯片U1的第四十六引脚和第四十七引脚都与晶振电路连接,所述晶振电路用于为控制芯片U1提供时钟信号。
进一步的,动作执行模块包括:
开关电路,通过所述信号转换芯片U7与控制芯片U1的第八引脚连接,所述开关电路用于开启或关闭负载工作状态;
进水动作电路,通过所述信号转换芯片U7与控制芯片U1的第十引脚连接,所述进水动作电路用于控制进水阀的进水;
排水动作电路,通过所述信号转换芯片U7与控制芯片U1的第二十九引脚和第三十引脚连接,所述排水动作电路用于控制排水阀的排水;
超声波动作电路,通过所述信号转换芯片U7与控制芯片U1的第九引脚连接,所述超声波动作电路用于控制超声波的产生;
水泵动作电路,与控制芯片U1的第五引脚和第二引脚连接,所述水泵动作电路用于控制水泵的工作状态;
喷淋动作电路,与控制芯片U1的第一引脚连接,所述喷淋动作电路用于控制喷淋器的工作状态;
加热电路,与控制芯片U1的第六引脚和第七引脚连接,所述加热电路用于对洗碗机内部容器进行加热。
进一步的,传感检测模块包括水位检测电路;
所述水位检测电路包括:电阻R61、电容C61、三极管Q13、电阻R62、电阻R63、电阻R64、电容C62、电阻R65、电容C63、电阻R66、电阻R67、电阻R68、电容C64、电阻R69、三极管Q12和接口J2;
电阻R61的一端与控制芯片U1的第四十一引脚连接,另一端与三极管Q13的集电极连接,三极管Q13的集电极还通过电阻R62与电源模块连接,电阻R61与控制芯片U1连接的一端还接地,三极管Q13的发射极接地,三极管Q13的基极通过电阻R63与接口J12的端口6连接,电阻R63与三极管Q13连接的一端还通过电阻R64接地,电阻R63与接口J12连接的一端还通过电容C62接地,电阻R66的一端与控制芯片U1的第二十三引脚连接,另一端通过电容C63接地,电阻R66与电容C63连接的一端还与接口J12的端口4连接,接口J12的接口4还通过电阻R65与电源模块连接,电阻R68的一端与控制芯片U1的第二十四引脚连接,另一端通过电容C64接地,电阻R68与电容C64连接的一端还与接口J12的端口2连接,接口J12的接口2还通过电阻R67与电源模块连接,电阻R69的一端与控制芯片U1的第二十引脚连接,另一端与三极管Q12的基极连接,三极管Q12的集电极接地,三极管Q12的发射极与接口J12的端口6连接,所述接口J12用于与水位传感器连接。
进一步的,传感检测模块还包括温度检测电路;
所述温度检测电路包括电阻R51、电容C50、电阻R52和接口J9;
接口J9的端口1通过电阻R52与电源模块连接,还与电阻R51的一端连接,电阻R51的另一端与控制芯片U1的四十引脚连接,电阻R51与控制芯片连接的一端还通过电容C50接地,接口J9的端口2接地,所述接口J9用于与温度传感器连接。
进一步的,电源模块包括:
电压转换电路,用于将预设输入电源转换为预设电压为动作执行模块、传感检测模块和控制模块供电;
稳压反馈电路,用于向电压转换电路反馈转换后的预设电压,并调节输出的预设电压值;
过零检测电路,用于根据输入电源产生过零信号,并发送给控制模块。
进一步的,稳压反馈电路包括芯片U5、电阻R3、电容C10、电容C11、电阻R5、光耦U3、电阻R7、电阻R6、电阻R8、电阻R9、电阻R10、电容C9和三端可调分流基准源D7;
芯片U5的第四引脚至第八引脚都与电压转换电路连接,芯片U5的第五引脚至第八引脚都接地,芯片U5的第二引脚与电阻R3的一端连接,电阻R3的另一端与电压转换单元连接,芯片U5的第二引脚还通过电容C10接地,电阻R3与电压转换单元连接的一端还与电容C11的正极连接,电容C11的负极接地,芯片U5的第一引脚分别与电阻R5的一端和光耦U3的端口1连接,电阻R5的另一端与光耦U3的端口2连接,光耦U3的端口2还接地,光耦U3的端口3通过电阻R7与电压转换单元连接,电阻R7与电压转换单元连接的一端还与电阻R9的一端连接,电阻R9的另一端通过电阻R10接地,光耦U3的端口3还通过电阻R6与三端可调分流基准源D7的端口2连接,光耦U3的端口4分别与三端可调分流基准源D7的端口2和电容C19的一端连接,电容C19的另一端通过电阻R8与三端可调分流基准源D7的端口1连接,三端可调分流基准源D7的端口3接地,三端可调分流基准源D7的端口1还通过电阻R10接地。
进一步的,过零检测电路包括电阻R11、二极管D11、电阻R12、光耦U6、电阻R13、电阻R14和电容C20;
电阻R11的一端与动作执行模块连接,电阻R11的另一端与光耦U6的第一端口连接,继电器K3的线圈一端与电压转化电路连接,另一端与控制模块连接,二极管D11的正极通过电阻R12与光耦U6的第二端口连接,二极管D11的负极与光耦U6的第一端口连接,二极管D11的正极还与漏电保护电路连接,光耦U6的第三端口通过电阻R14与控制模块连接,光耦U6的第三端口通过电阻R13与电压转换电路连接,光耦U6的第三端口通过电容C20接地,光耦U6的第四端口接地。
进一步的,还包括蜂鸣器模块,用于根据预设控制信号发出预设语音内容。
一种洗碗机控制方法,包括步骤:
通过电源模块为控制模块、传感检测模块和动作执行模块供电;
通过控制模块获取的预设指令向动作执行模块发送控制信号;
根据控制模块的控制信号动作执行模块开启相应负载,执行相应的负载动作。
进一步的,通过电源模块为控制模块、传感检测模块和动作执行模块供电的具体步骤为:
通过电压转换电路将预设输入电源转换为预设电压为动作执行模块、传感检测模块和控制模块供电;
向电压转换电路反馈转换后的预设电压,并调节输出的预设电压值。
进一步的,还包括步骤:
通过传感器检测模块根据预设控制信号检测洗碗机中的水位及温度信息。
进一步的,还包括步骤:
通过蜂鸣器模块根据预设控制信号发出预设语音内容。
本发明与现有技术相比,至少包含以下有益效果:
(1)通过控制芯片U1对洗碗机各个负载进行调节控制,使得洗碗机能够在一个控制中心完成各个负载的调节,使得洗碗机变得高度智能化;
(2)通过传感检测模块,实时监测洗碗机的工作状态,并及时反馈至控制模块执行相应的操作;
(3)在电源模块设置有稳压反馈电路,通过反馈调整输出电压的数值,使其能够稳定输出,并通过过零检测电路及时检测电源模块的工作状态,避免因电源故障而造成事故。
附图说明
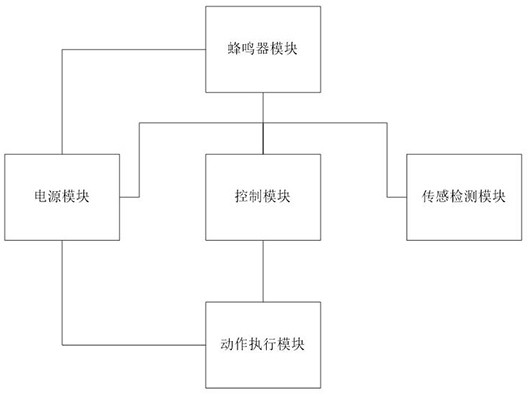
图1是本发明实施例的架构示意图;
图2是本发明实施例中的控制模块的电路图;
图3是本发明实施例的动作执行模块中开关电路、进水动作电路、超声波动作电路和水泵动作电路的电路图;
图4是本发明实施例的动作执行模块中排水动作电路、喷淋动作电路、加热电路的电路图;
图5是本发明实施例中的传感检测模块的电路图;
图6是本发明实施例电源模块中电压转换电路和稳压反馈电路的电路图;
图7是本发明实施例电源模块中过零检测电路的电路图;
图8是本发明实施例蜂鸣器模块的电路图;
图9是本发明实施例中洗完碗控制方法的流程图。
具体实施方式
以下是本发明的具体实施例,并结合附图对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
以下以在洗碗机中的应用为例对本发明实施例提供的一种洗碗机控制电路进行详细说明:
实施例一
洗碗机包括洗碗机负载和上述洗碗机控制电路,洗碗机控制电路对洗碗机负载的工作状态进行驱动控制。
本发明一种洗碗机控制电路,如图1所示,包括:控制模块、动作执行模块、传感检测模块、蜂鸣器模块和电源模块;
动作执行模块、蜂鸣器模块和传感检测模块都与控制模块连接;
控制模块用于通过预设指令向动作执行模块发送控制信号,动作执行模块用于根据控制模块的控制信号执行相应的动作,传感检测模块用于洗碗机中的水位检测及温度检测,电源模块用于输出电源转化为预设电压为动作执行模块、传感器检测模块和控制模块供电,蜂鸣器模块用于根据预设控制信号发出预设语音内容。
具体的,如图2所示,控制模块包括:控制芯片U1、信号转换芯片U7和晶振电路。
控制芯片U1的第六引脚与信号转换芯片U7的第七引脚连接,控制芯片U1的第七引脚与信号转换芯片U7的第六引脚连接,控制芯片U1的第八引脚与信号转换芯片U7的第五引脚连接,控制芯片U1的第九引脚与信号转换芯片U7的第四引脚连接,控制芯片U1的第十引脚与信号转换芯片U7的第三引脚连接,控制芯片U1的第二十九引脚与信号转换芯片U7的第一引脚连接,控制芯片U1的第三十引脚与信号转换芯片U7的第二引脚连接,控制芯片U1的第四十六管脚和第四十七管脚都与晶振电路连接。
所述控制芯片U1的第六引脚和第七引脚通过信号转换芯片U7向动作执行模块发送加热信号,控制加热丝进行加热;控制芯片U1的第八引脚通过信号转换芯片U7向动作执行模块发送负载开关信号,控制洗碗机各个负载的工作状态;控制芯片U1的第九引脚通过信号转换芯片U7向动作执行模块发送超声波控制信号,控制超声波发生装置进行工作;控制芯片U1的第十引脚通过信号转换芯片U7向动作执行模块发送进水信号,控制洗碗机进水阀的工作状态;控制芯片U1的第二十九引脚和第三十引脚通过信号转换芯片U7向动作执行模块发送排水信号,控制排水阀的开关状态;
控制芯片U1的型号为R5F100FE,通过控制芯片U1各个管脚分别控制洗碗机相应的功能,使得洗碗机更加智能化。
如图3和图4所示,动作执行模块包括开关电路、进水动作电路、排水动作电路、超声波动作电路、水泵动作电路、喷淋动作电路和加热电路;
开关电路中的继电器K3通过所述信号转换芯片U7与控制芯片U1的第八引脚连接;开关电路用于开启或关闭进水动作电路、排水动作电路、超声波动作电路、水泵动作电路、喷淋动作电路和加热电路,开关电路相当于一个总开关,只是在开关电路的继电器K3闭合情况下,各个负载动作电路才能够进行正常的工作,防止其中某个动作电路的误开启情况;
进水动作电路包括接口J2、继电器K4和二极管D10;接口J2用于连接进水阀门,继电器K3通过所述信号转换芯片U7与控制芯片U1的第十引脚连接,进水动作电路用于控制进水阀的进水。
排水动作电路包括接口J6、继电器K9、继电器K10、二极管D16和二极管D17,接口J6连接排水口,继电器K9和继电器K10分别通过所述信号转换芯片U7与控制芯片U1的第二十九引脚和第三十引脚连接,排水动作电路用于控制排水口的排水。
超声波动作电路包括接口J3和继电器K5,接口J3用于连接超声波发生器,继电器K5通过所述信号转换芯片U7与控制芯片U1的第九引脚连接,超声波动作电路用于控制超声波的产生,使得洗碗机具有超声清洗的功能。
水泵动作电路,包括继电器K6、继电器K7、电阻RN1、三极管Q1、三极管Q2、电阻R15、电阻R16、二极管D12、二极管D13、整流桥BG2和电解电容EC2,继电器K7和继电器K6分别与控制芯片U1的第五引脚和第二引脚连接,水泵需要310V电压才能工作,因此在水泵动作电路中设置有整流桥BG2和电解电容EC2对输入电源进行交直流转换和滤波,水泵动作电路用于控制水泵的工作状态,通过水泵向洗碗机内进行进水。
喷淋动作电路包括接口J5、电阻R17、电容C12、电容C22、电解电容C23、电压芯片U8二极管D14、电容C24、继电器K8、二极管D15、三极管Q3和电阻R18,继电器K8与控制芯片U1的第一引脚连接,接口J5用于与喷淋器连接,喷淋动作电路用于控制喷淋器的工作状态;
因为喷淋器所需要的电源电压与电源模块输出的预设电压不同,因此在这里设置了电压芯片U8将外接电源转化为与喷淋器适配的15V电压,对喷淋器进行供电。
加热电路包括继电器K1、继电器K2、二极管D8和二极管D9,继电器K1和继电器K2与控制芯片U1的第六引脚和第七引脚连接,加热电路用于对洗碗机内部容器进行加热。
如图5所示,传感检测模块包括水位检测电路和温度检测电路。
水位检测电路包括:电阻R61、电容C61、三极管Q13、电阻R62、电阻R63、电阻R64、电容C62、电阻R65、电容C63、电阻R66、电阻R67、电阻R68、电容C64、电阻R69、三极管Q12和接口J2;
电阻R61的一端与控制芯片U1的第四十一引脚连接,另一端与三极管Q13的集电极连接,三极管Q13的集电极还通过电阻R62与电源模块连接,电阻R61与控制芯片U1连接的一端还接地,三极管Q13的发射极接地,三极管Q13的基极通过电阻R63与接口J12的端口6连接,电阻R63与三极管Q13连接的一端还通过电阻R64接地,电阻R63与接口J12连接的一端还通过电容C62接地,电阻R66的一端与控制芯片U1的第二十三引脚连接,另一端通过电容C63接地,电阻R66与电容C63连接的一端还与接口J12的端口4连接,接口J12的接口4还通过电阻R65与电源模块连接,电阻R68的一端与控制芯片U1的第二十四引脚连接,另一端通过电容C64接地,电阻R68与电容C64连接的一端还与接口J12的端口2连接,接口J12的接口2还通过电阻R67与电源模块连接,电阻R69的一端与控制芯片U1的第二十引脚连接,另一端与三极管Q12的基极连接,三极管Q12的集电极接地,三极管Q12的发射极与接口J12的端口6连接,所述接口J12用于与水位传感器连接。
水位检测电路通过接口J12连接水位传感器,通过水位传感器采集的信号通过接口J12的各个端口分别发送对应的信号至控制模块,例如接口J12的端口6发送信号至三极管Q13,使得三极管Q13导通,水量计数的网络端口输出的电平信号将由高变为低,并发送至控制芯片U1中,控制芯片U1就能向动作执行模块发送下一动作的控制信号。
水位检测电路能够通过水位传感器对进水量、洗碗机水位以及洗碗机是否漏水进行检测,并及时反馈给控制芯片U1,控制芯片U1进而根据水位等状态调节洗碗机的工作流程。
温度检测电路包括电阻R51、电容C50、电阻R52和接口J9;
接口J9的端口1通过电阻R52与电源模块连接,还与电阻R51的一端连接,电阻R51的另一端与控制芯片U1的四十引脚连接,电阻R51与控制芯片连接的一端还通过电容C50接地,接口J9的端口2接地,所述接口J9用于与温度传感器连接。
温度检测电路和加热电路共同作用,当加热电路进行工作时,实时检测洗碗机内的温度,并反馈给控制芯片U1,对洗碗机内部的温度进行调节,防止洗碗机内部温度过高而产生爆裂等事故。
如图6至图7所示,电源模块包括电压转换电路、稳压反馈电路和过零检测电路;
电压转换电路用于将预设输入电源转换为预设电压为动作执行模块、传感检测模块和控制模块供电;稳压反馈电路用于向电压转换单元反馈转换后的预设电压,并调节输出的预设电压值;过零检测电路用于根据输入电源产生过零信号,并发送给控制模块,通过控制模块控制电源有效输出。
在电压转换电路中,通过接口J1与输入电源连接,通过共模电感L1和安规电容C1至C6对输入电源进行滤波,随后通过整流桥BG1将滤波后的输入电源进行交直流转换得到直流电源,将直流电源通过变压器进行降压的到预设12V电压,12V的电压能够为动作执行模块中的继电器进行供电,也能够给驱动蜂鸣器进行语音内容的输出;
12V的电压通过稳压芯片U4进一步的降压得到5V电压,5V电压能够为传感检测模块以及控制芯片U1进行供电。
接口J1还用于连接加热丝,通过接口J1和加热电路连接,对洗碗机内部容器进行加热。
稳压反馈电路包括芯片U5、电阻R3、电容C10、电容C11、电阻R5、光耦U3、电阻R7、电阻R6、电阻R8、电阻R9、电阻R10、电容C9和三端可调分流基准源D7;
芯片U5的第四引脚至第八引脚都与电压转换电路连接,芯片U5的第五引脚至第八引脚都接地,芯片U5的第二引脚与电阻R3的一端连接,电阻R3的另一端与电压转换单元连接,芯片U5的第二引脚还通过电容C10接地,电阻R3与电压转换单元连接的一端还与电容C11的正极连接,电容C11的负极接地,芯片U5的第一引脚分别与电阻R5的一端和光耦U3的端口1连接,电阻R5的另一端与光耦U3的端口2连接,光耦U3的端口2还接地,光耦U3的端口3通过电阻R7与电压转换单元连接,电阻R7与电压转换单元连接的一端还与电阻R9的一端连接,电阻R9的另一端通过电阻R10接地,光耦U3的端口3还通过电阻R6与三端可调分流基准源D7的端口2连接,光耦U3的端口4分别与三端可调分流基准源D7的端口2和电容C19的一端连接,电容C19的另一端通过电阻R8与三端可调分流基准源D7的端口1连接,三端可调分流基准源D7的端口3接地,三端可调分流基准源D7的端口1还通过电阻R10接地。
从12V电压输出端采集信号,通过光耦U3的隔离传输至芯片U5中,并通过芯片U5的第四引脚输出调节流经变压器T1的电流大小,进而能够控制电压的精准输出,使得洗碗机的工作状态持续稳定。
如图7所示,过零检测电路包括电阻R11、二极管D11、电阻R12、光耦U6、电阻R13、电阻R14和电容C20;
电阻R11的一端与动作执行模块连接,电阻R11的另一端与光耦U6的第一端口连接,继电器K3的线圈一端与电压转化电路连接,另一端与控制模块连接,二极管D11的正极通过电阻R12与光耦U6的第二端口连接,二极管D11的负极与光耦U6的第一端口连接,二极管D11的正极还与漏电保护电路连接,光耦U6的第三端口通过电阻R14与控制模块连接,光耦U6的第三端口通过电阻R13与电压转换电路连接,光耦U6的第三端口通过电容C20接地,光耦U6的第四端口接地。
在过零检测电路中,将电源输入信号通过光耦隔离传输至控制芯片U1中,使得控制芯片U1能够实时获取到电源输入的状态。
如图8所示,蜂鸣器模块包括电阻R19、三极管Q6、电阻R20、三极管Q5、电阻R23、电阻R24、电解电容C25、电阻R21、三极管Q4和蜂鸣器LS1。
电阻R19的一端与控制芯片U1的第三十二引脚连接,另一端与三极管Q6的基极连接,三极管Q6的集电极通过电阻R21与三极管Q4的基极连接,三极管Q4的发射极与电源模块连接,三极管Q4的集电极与蜂鸣器LS1的第一端口连接,三极管Q4的集电极还与蜂鸣器LS1的第二端口连接,电阻R20的一端与控制芯片U1的第三十一引脚连接,另一端与三极管Q5的基极连接,三极管Q5的集电极与蜂鸣器LS1的第二端口连接,三极管Q5的发射极与电解电容C25的负极连接,电解电容C25的正极通过电阻R24与蜂鸣器LS1的第一端口连接。
三极管Q4发射极连接电源,电源信号通过三极管Q4分别流向蜂鸣器LS1和三极管Q6,控制芯片U1发送控制信号使得三极管Q6导通,蜂鸣器端则不会接收到电源信号,而当控制信号通过电阻R20发送至三极管Q5的基极是,三极管Q5导通,流经蜂鸣器LS1的电流便能正常传输使得蜂鸣器发出预设预设语音内容。
实施例二
如图9所示,本发明一种洗碗机控制方法,包括步骤:
S1、通过电源模块为控制模块、传感检测模块和动作执行模块供电;
S2、通过控制模块获取的预设指令向动作执行模块发送控制信号;
S3、根据控制模块的控制信号动作执行模块开启相应负载,执行相应的负载动作;
S4、通过传感器检测模块根据预设控制信号检测洗碗机中的水位及温度信息;
S5、通过蜂鸣器模块根据预设控制信号发出预设语音内容。
其中,步骤S1中通过电源模块为控制模块、传感检测模块和动作执行模块供电的具体步骤为:
S11、通过电压转换电路将预设输入电源转换为预设电压为动作执行模块、传感检测模块和控制模块供电;
步骤S11的具体过程为在电压转换电路中,通过接口J1与输入电源连接,通过共模电感L1和安规电容C1至C6对输入电源进行滤波,随后通过整流桥BG1将滤波后的输入电源进行交直流转换得到直流电源,将直流电源通过变压器进行降压的到预设12V电压,12V的电压能够为动作执行模块中的继电器进行供电,也能够给驱动蜂鸣器进行语音内容的输出。
12V的电压通过稳压芯片U4进一步的降压得到5V电压,5V电压能够为传感检测模块以及控制芯片U1进行供电。
S12、向电压转换电路反馈转换后的预设电压,并调节输出的预设电压值。
步骤S12的具体过程为从12V电压输出端采集信号,通过光耦U3的隔离传输至芯片U5中,并通过芯片U5的第四引脚输出调节流经变压器T1的电流大小,进而能够控制电压的精准输出,使得洗碗机的工作状态持续稳定。
本发明通过控制芯片U1对洗碗机各个负载进行调节控制,使得洗碗机能够在一个控制中心完成各个负载的调节,使得洗碗机变得高度智能化;通过传感检测模块,实时监测洗碗机的工作状态,并及时反馈至控制模块执行相应的操作;在电源模块设置有稳压反馈电路,通过反馈调整输出电压的数值,使其能够稳定输出,并通过过零检测电路及时检测电源模块的工作状态,避免因电源故障而造成事故。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
- 一种洗碗机控制电路、洗碗机及洗碗机控制方法
- 用于洗碗机的控制方法、用于洗碗机的控制装置和洗碗机