一种无人机攻击移动目标俯冲飞行半实物仿真系统及方法
文献发布时间:2023-06-19 12:13:22
技术领域
本发明属于无人机半实物仿真系统领域,更具体地,涉及一种无人机攻击移动目标俯冲飞行半实物仿真系统及方法。
背景技术
反辐射无人机可以对各种辐射源进行攻击,属于消耗性武器,其截获识别目标后进入俯冲飞行阶段,该阶段是决定反辐射无人机攻击效果的关键阶段。对这一阶段研究采用实物试验的方式具有试验周期长、干扰因素多和成本代价高等特点。
通过构建无人机俯冲攻击移动目标半实物仿真系统可以对无人机俯冲飞行阶段的攻击方向、飞控策略等行业重难点问题进行研究。但是现有的无人机半实物仿真系统并不适用。专利文献“一种无人机半实物仿真系统与仿真方法”公开通过改进飞行控制器设计以解决无人机续航问题,其着眼于巡航状态,不是针对俯冲攻击状态,这两种状态的目的不同,飞行控制策略也不同,无法用于模拟和改进俯冲攻击策略;此外系统中没有设置运动目标,不具备模拟无人机与目标的相互运动状态和位置关系能力,从而无法用于模拟无人机攻击移动目标俯冲飞行阶段的态势;
专利文献“一种反辐射无人机模拟训练系统”中的无人机模拟训练系统是针对作战假想模拟、发射控制训练、飞行监视训练及压制攻击训练特性的模拟训练系统,系统模拟及参数生成均采用软件生成,模拟数据与实际设备参数存在差异,可信度和逼真度不高。另外系统也没有设置运动目标,不具备模拟无人机与目标的相互运行状态和位置关系能力,从而无法用于模拟无人机攻击移动目标俯冲飞行阶段的态势。
发明内容
针对现有技术的缺陷,本发明的目的在于提供一种无人机攻击移动目标俯冲飞行半实物仿真系统及方法,旨在解决现有的无人机半实物仿真系统由于没有设置运动目标,不具备模拟无人机与目标的相互运行状态和位置关系的能力,导致无法用于模拟无人机攻击移动目标俯冲飞行阶段态势的问题。
为实现上述目的,一方面,本发明提供了一种无人机攻击移动目标俯冲飞行半实物仿真系统,包括主控计算机、模拟仿真计算机、仿真台架、矢量信号源、辐射天线和无人机侦察载荷;
主控计算机、模拟仿真计算机和仿真台架两两之间支持双向数据传输;无人机侦察载荷与模拟仿真计算机间支持双向数据传输;模拟仿真计算机、矢量信号源和辐射天线顺次单向存在信号传输;
主控计算机用于对仿真台架、辐射源和无人机侦察载荷的初始位置关系和运动参数进行设置;并将设置的运动指令传递至仿真台架;并实时显示无人机俯冲攻击的态势信息;
模拟仿真计算机用于对矢量信号源和无人机侦察载荷的信号参数进行设置;并分析工作状态下无人机侦察载荷和辐射源实时的位置,通过无人机侦察载荷和辐射源的相对位置仿真分析设定条件下无人机和辐射源的态势信息并对其进行缩比映射;
仿真台架用于根据运动指令,对无人机侦察载荷的位置、姿态和运动状态进行模拟;同时也对辐射源的位置、姿态、运动状态进行模拟;向模拟仿真计算机传递实时的辐射源位置、无人机侦察载荷位置及无人机侦察载荷姿态信息;
无人机侦察载荷用于接收模拟仿真计算机传递的信号参数,且实时向模拟仿真计算机传递自身被动侦察载荷传感器数据。
优选地,仿真台架包括单轴运动系统和五轴运动系统;
单轴运动系统上设置有辐射天线,五轴运动系统上设置有无人机侦察载荷;
单轴运动系统用于支撑辐射天线,并根据运动指令带动辐射天线运动,向模拟仿真计算机传递实时的辐射源位置;
五轴运动系统用于支撑无人机侦察载荷,并根据运动指令带动无人机侦察载荷运动,向模拟仿真计算机传递实时的无人机侦察载荷位置;
其中,无人机侦察载荷为无人机雷达对抗侦察载荷。
优选地,主控计算机包括态势显示模块、参数设置模块和六轴联动控制模块;
态势显示模块用于将实时接收的设定条件下无人机和辐射源的态势信息进行显示;
参数设置模块用于对单轴运动系统与五轴运动系统的初始位置进行设置与校正,对辐射源与无人机侦察载荷初始运动参数进行设置;
六轴联动控制模块用于实时向仿真台架发送运动指令。
优选地,模拟仿真计算机包括辐射源模拟模块、侦察载荷参数设置模块、无人机飞行控制模拟模块和攻击态势缩比模型;
辐射源模拟模块用于提供矢量信号源的信号参数数据,实现对各类辐射源目标的模拟;
侦察载荷参数设置模块用于对无人机侦察载荷的信号参数进行设置、加载并实时接收侦察载荷传感器数据;
无人机飞行控制模拟模块用于根据无人机侦察载荷的传感数据进行制导律的运算,用以实时分析无人机侦察载荷下一空间位置;
攻击态势缩比模型用于通过无人机侦察载荷和辐射源的相对位置仿真分析设定条件下无人机和辐射源的态势信息并对其进行缩比映射。
优选地,仿真台架还包括限位保护模块,用于对单轴运动系统和五轴运动系统上的器件限定开关。
优选地,主控计算机还包括数据存储模块和回放分析模块;
数据存储模块用于对无人机侦察载荷和辐射源的实时运动参数进行存储;
回放分析模块用于通过读取数据存储模块存储的数据,对态势进行回放,分析无人机俯冲方法和飞控方式对攻击精度的影响。
另一方面,基于上述提供的无人机攻击移动目标俯冲飞行半实物仿真系统,本发明提供了相应的仿真方法,包括以下步骤:
(1)对仿真台架、辐射源和无人机侦察载荷的初始位置关系和运动参数进行设置,且对矢量信号源和无人机侦察载荷的信号参数进行设置;
(2)基于步骤(1)设定的初始位置关系、运动参数和信号参数,根据接收的运动指令,对无人机侦察载荷和辐射源进行位置、姿态和运动状态的模拟;
(3)通过无人机侦察载荷和辐射源的相对位置仿真分析设定条件下无人机和辐射源的态势信息并对其进行缩比映射;
(4)实时显示无人机和辐射源的态势信息。
优选地,上述仿真方法,包括以下步骤:
通过读取无人机侦察载荷和辐射源的实时运动数据,对态势进行回放,分析无人机俯冲方法和飞控方式对攻击精度的影响;
其中,运动数据包括位置数据、姿态数据和运动状态数据。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
相比于传统无人机半实物仿真系统,本发明在主控计算机中设置各单元的初始运动参数,并设置运动指令,仿真台架通过运动指令,驱动无人机侦察载荷和辐射源按照设定的位置、姿态和运动状态进行模拟,模拟仿真计算机可以通过无人机侦察载荷和辐射源的相对位置缩比映射设定条件下无人机和辐射源的态势信息,因此,本发明具有无人机对目标俯冲攻击阶段飞行模拟能力,具有一定的实用价值和参考价值。
本发明中单轴运行系统和五轴运动系统分别设置辐射天线和无人机侦察载荷,通过单轴运动系统和五轴运动系统的带动,可以改变辐射天线和无人机侦察载荷的位置,使本发明具备无人机对移动目标俯冲攻击阶段的不同攻击态势的模拟能力。
相比于软件仿真模型,本发明采用无人机侦察载荷实物,提高了攻击模拟的精确度和可信度。
本发明的主控计算机中包括数据存储模块和回放分析模块,数据存储模块可以存储实时的无人机侦察载荷和辐射源的运动数据;回放分析模块可以根据存储的数据,对态势进行回放,可以分析无人机俯冲方法和飞控方式对攻击精度的影响,便于实际应用中的学习与分析。
本发明中的仿真台架包括限位保护模块,可以限定单轴运动系统和五轴运动系统上的器件开关,可以保证系统的安全。
本发明相比于实物验证,模拟效费比高、时效性强,降低了研究成本,提高了无人机俯冲阶段飞行控制和攻击方法研究效率。
附图说明
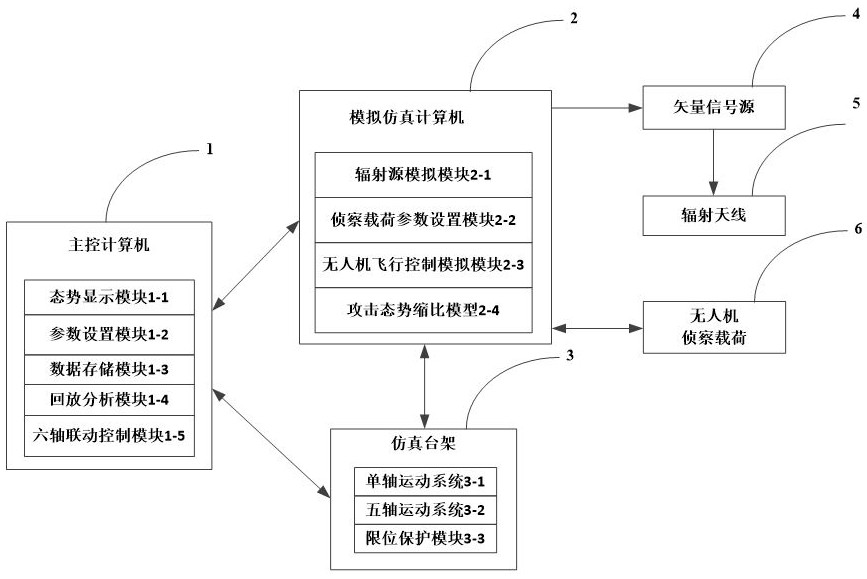
图1是本发明实施例提供的无人机攻击移动目标俯冲飞行半实物仿真系统;
图2是本发明实施例提供的半实物仿真系统的硬件布设实例示意图;
图3是本发明实施例提供的半实物仿真系统的软件实例示意图;
标记说明:
1:主控计算机;2:模拟仿真计算机;3:仿真台架;4:矢量信号源;5:辐射天线;6:无人机侦察载荷;1-1:态势显示模块;1-2:参数设置模块;1-3:数据存储模块;1-4:回放分析模块;1-5:六轴联动控制模块;2-1:辐射源模拟模块;2-2:侦察载荷参数设置模块;2-3:无人机飞行控制模拟模块;2-4:攻击态势缩比模型;3-1:单轴运动系统;3-2五轴运动系统;3-3:限位保护模块;3-1-1:可移动支架;3-1-2:单轴驱动电机;3-1-3:单轴伺服驱动器;3-2-1:x方向的两条平行导轨;3-2-2:y方向的导轨;3-2-3:z方向的导轨;3-2-4:方位/俯仰二维转台;3-2-5:第一驱动电机;3-2-6:第二驱动电机;3-2-7:第三驱动电机;3-2-8:第四驱动电机;3-2-9:第五驱动电机;3-2-10:五轴伺服驱动器;7-微波暗室;3-2-11:夹具。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
一方面,本发明提供了一种无人机攻击移动目标俯冲飞行半实物仿真系统,包括主控计算机、模拟仿真计算机、仿真台架、矢量信号源、辐射天线和无人机侦察载荷;
主控计算机、模拟仿真计算机和仿真台架两两之间支持双向数据传输;无人机侦察载荷与模拟仿真计算机间支持双向数据传输;模拟仿真计算机、矢量信号源和辐射天线顺次单向存在信号传输;
主控计算机用于对仿真台架、辐射源和无人机侦察载荷的初始位置关系和运动参数进行设置;并将设置的运动指令传递至仿真台架;并实时显示无人机俯冲攻击的态势信息;
模拟仿真计算机用于对矢量信号源和无人机侦察载荷的信号参数进行设置;并分析工作状态下无人机侦察载荷和辐射源实时的位置,通过无人机侦察载荷和辐射源的相对位置仿真分析设定条件下无人机和辐射源的态势信息并对其进行缩比映射;
仿真台架用于根据运动指令,对无人机侦察载荷的位置、姿态和运动状态进行模拟;同时也对辐射源的位置、姿态、运动状态进行模拟;向模拟仿真计算机传递实时的辐射源位置、无人机侦察载荷位置及无人机侦察载荷姿态信息;
无人机侦察载荷用于接收模拟仿真计算机传递的信号参数,且实时向模拟仿真计算机传递自身被动侦察载荷传感器数据。
优选地,仿真台架包括单轴运动系统和五轴运动系统;
单轴运动系统上设置有辐射天线,五轴运动系统上设置有无人机侦察载荷;
单轴运动系统用于支撑辐射天线,并根据运动指令带动辐射天线运动,向模拟仿真计算机传递实时的辐射源位置;
五轴运动系统用于支撑无人机侦察载荷,并根据运动指令带动无人机侦察载荷运动,向模拟仿真计算机传递实时的无人机侦察载荷位置。
优选地,主控计算机包括态势显示模块、参数设置模块和六轴联动控制模块;
态势显示模块用于将实时接收的设定条件下无人机和辐射源的态势信息进行显示;
参数设置模块用于对单轴运动系统与五轴运动系统的初始位置进行设置与校正,对辐射源与无人机侦察载荷初始运动参数进行设置;
六轴联动控制模块用于实时向仿真台架发送运动指令。
优选地,模拟仿真计算机包括辐射源模拟模块、侦察载荷参数设置模块、无人机飞行控制模拟模块和攻击态势缩比模型;
辐射源模拟模块用于提供矢量信号源的信号参数数据,实现对各类辐射源目标的模拟;
侦察载荷参数设置模块用于对无人机侦察载荷的信号参数进行设置、加载并实时接收侦察载荷传感器数据;
无人机飞行控制模拟模块用于根据无人机侦察载荷的传感数据进行制导律的运算,用以实时分析无人机侦察载荷下一空间位置;
攻击态势缩比模型用于通过无人机侦察载荷和辐射源的相对位置仿真分析设定条件下无人机和辐射源的态势信息并对其进行缩比映射。
优选地,仿真台架还包括限位保护模块,用于对单轴运动系统和五轴运动系统上的器件限定开关。
优选地,主控计算机还包括数据存储模块和回放分析模块;
数据存储模块用于对无人机侦察载荷和辐射源的实时运动参数进行存储;
回放分析模块用于通过读取数据存储模块存储的数据,对态势进行回放,分析无人机俯冲方法和飞控方式对攻击精度的影响。
另一方面,基于上述提供的无人机攻击移动目标俯冲飞行半实物仿真系统,本发明提供了相应的仿真方法,包括以下步骤:
(1)对仿真台架、辐射源和无人机侦察载荷的初始位置关系和运动参数进行设置,且对矢量信号源和无人机侦察载荷的信号参数进行设置;
(2)基于步骤(1)设定的初始位置关系、运动参数和信号参数,根据接收的运动指令,对无人机侦察载荷和辐射源进行位置、姿态和运动状态的模拟;
(3)通过无人机侦察载荷和辐射源的相对位置仿真分析设定条件下无人机和辐射源的态势信息并对其进行缩比映射;
(4)实时显示无人机和辐射源的态势信息。
优选地,上述仿真方法,包括以下步骤:
通过读取无人机侦察载荷和辐射源的实时运动数据,对态势进行回放,分析无人机俯冲方法和飞控方式对攻击精度的影响;
其中,运动数据包括位置数据、姿态数据和运动状态数据。
实施例
如图1所示,本发明提供了一种无人机攻击移动目标俯冲飞行半实物仿真系统,包括主控计算机1、模拟仿真计算机2、仿真台架3、矢量信号源4、辐射天线5和无人机侦察载荷6;
主控计算机1作为人机交互的界面,用于提供丰富的系统操作、控制和设置的功能;
具体地,主控计算机1包括态势显示模块1-1、参数设置模块1-2、数据存储模块1-3、回放分析模块1-4和六轴联动控制模块1-5;
态势显示模块1-1用于通过采集无人机侦察载荷6和辐射源的位置实时地显示无人机俯冲攻击的态势信息,包括辐射源的移动动画和无人机侦察载荷6的俯冲动画,便于根据实时态势信息对系统进行监控;
参数设置模块1-2用于对仿真台架3中单轴运动系统3-1与五轴运动系统3-2的初始位置设置与校正,对辐射源与无人机侦察载荷6初始位置的设置,辐射源模拟速度设置以及无人机俯冲初始速度设置,所设置的参数发送至模拟仿真计算机2和仿真台架3;
数据存储模块1-3用于对无人机侦察载荷6的上报数据、姿态数据、运动数据、空间位置数据和辐射源的运动数据、空间位置数据进行存储;
回放分析模块1-4用于通过读取数据存储模块存储1-3的数据,对态势进行回放,分析无人机俯冲方法和飞控方式对攻击精度的影响;
六轴联动控制模块1-5包括五轴运动系统控制模块和单轴运动系统控制模块,根据运动指令并行运行,实时联动。
模拟仿真计算机2用于对主控计算机设置的参数进行仿真分析,模拟假想条件下无人机对辐射源攻击过程;
具体地,模拟仿真计算机2包括辐射源模拟模块2-1、侦察载荷参数设置模块2-2、无人机飞行控制模拟模块2-3和攻击态势缩比模型2-4;
辐射源模拟模块2-1为矢量信号源的上位机软件模块,用于通过接收用户设置的辐射源参数生成提供给矢量信号源的信号参数数据,实现对各类辐射源目标的模拟;
侦察载荷参数设置模块2-2用于对无人机侦察载荷的信号参数进行设置、加载并实时接收侦察载荷传感器数据;
无人机飞行控制模拟模块2-3用于根据无人机侦察载荷6的传感器数据进行制导律的运算,用以实时分析无人机侦察载荷下一空间位置;
攻击态势缩比模型2-4用于通过无人机侦察载荷6和辐射源的相对位置缩比映射设定条件下无人机和辐射源的态势信息。
仿真台架3用于对侦察载荷的位置、姿态、运动状态和辐射源的位置、运动状态进行模拟;
具体地,仿真台架3包括单轴运动系统3-1、五轴运动系统3-2、限位保护模块3-3;
单轴运动系统3-1用于支撑辐射天线并带动辐射天线运动,包括步进电机和轨道;
五轴运动系统3-2是支撑无人机侦察载荷并带动无人机侦察载荷运动的系统,可实现侦察载荷方位、俯仰两个维度的旋转和侦察载荷三维空间位置的平动;
限位保护模块3-3用于对单轴运动系统3-1和五轴运动系统3-2上的光电或机械限位开关,确保设备的安全;
单轴运动系统3-1包括可移动支架3-1-1、单轴驱动电机3-1-2和单轴伺服驱动器3-1-3;
可移动支架3-1-1是单轴运动系统3-1的支架,通过对可移动支架3-1-1的移动可以改变固定在单轴运动系统3-1上辐射天线的运动方向,实现侦察载荷攻击不同移动方向辐射源的态势;
五轴运动系统3-2包括五轴伺服驱动器3-2-10;
五轴伺服驱动器3-2-10和单轴伺服驱动器3-1-3分别为五轴运动系统3-2和单轴运动系统3-1的伺服驱动和高精度电机;
矢量信号源4采用支持各类型辐射源特征模拟的矢量信号源,其参数范围需满足辐射源模拟的需求;
辐射天线采用宽带喇叭天线,但是不限于这种天线样式,其参数范围满足辐射源模拟的需求;辐射天线朝上固定在单轴运动系统3-1上,模拟地面辐射源对空辐射;
无人机侦察载荷6采用实物,接收模拟仿真计算机2对其参数加卸载并实时上报测量参数至模拟仿真计算机2。
进一步地,半实物仿真系统的硬件布设如图2所示,主控计算机1、模拟仿真计算机2和矢量信号源4放置于微波暗室7外;辐射天线5和无人机侦察载荷6放置于微波暗室7内;主控计算机1、模拟仿真计算机2和矢量信号源4通过交换机8连接;辐射天线5固定于单轴运动系统3-1上,单轴运动系统3-1包括可移动支架3-1-1、单轴驱动电机3-1-2和单轴伺服驱动器3-1-3组成,根据主控计算机1设置的辐射源运动方向调整可移动支架3-1-1、单轴驱动电机3-1-2和单轴伺服驱动器3-1-3;根据模拟仿真计算机2的攻击态势缩比模型2-3的模拟速度辐射源;无人机侦察载荷固定于五轴运动系统3-2上,五轴运动系统包括固定在实验室天花板上
为了确保侦察载荷固定良好,应在侦察载荷方位/俯仰二维转台上设计侦察载荷夹具3-2-11,夹具3-2-11用于无人机侦察载荷6和转台之间的刚性连接和紧固;无人机侦察载荷6接收模拟仿真计算机2的侦察载荷参数设置模块2-1的参数,并将传感器数据实时回传,模拟仿真计算机2计算分析侦察载荷下一步进点位置后,仿真台架3控制侦察载荷以指定的速度和侦察载荷进行姿态变换并进动,半实物仿真系统的软件实例如图3所示。
综上所述,本发明与现有技术相比,存在以下优势:
相比于传统无人机半实物仿真系统,本发明在主控计算机中设置各单元的初始运动参数,并设置运动指令,仿真台架通过运动指令,驱动无人机侦察载荷和辐射源按照设定的位置、姿态和运动状态进行模拟,模拟仿真计算机可以通过无人机侦察载荷和辐射源的相对位置缩比映射设定条件下无人机和辐射源的态势信息,因此,本发明具有无人机对目标俯冲攻击阶段飞行模拟能力,具有一定的实用价值和参考价值。
本发明中单轴运行系统和五轴运动系统分别设置辐射天线和无人机侦察载荷,通过单轴运动系统和五轴运动系统的带动,可以改变辐射天线和无人机侦察载荷的位置,使本发明具备无人机对移动目标俯冲攻击阶段的不同攻击态势的模拟能力。
相比于软件仿真模型,本发明采用无人机侦察载荷实物,提高了攻击模拟的精确度和可信度。
本发明的主控计算机中包括数据存储模块和回放分析模块,数据存储模块可以存储实时的无人机侦察载荷和辐射源的运动数据;回放分析模块可以根据存储的数据,对态势进行回放,可以分析无人机俯冲方法和飞控方式对攻击精度的影响,便于实际应用中的学习与分析。
本发明中的仿真台架包括限位保护模块,可以限定单轴运动系统和五轴运动系统上的器件开关,可以保证系统的安全。
本发明相比于实物验证,模拟效费比高、时效性强,降低了研究成本,提高了无人机俯冲阶段飞行控制和攻击方法研究效率。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种无人机攻击移动目标俯冲飞行半实物仿真系统及方法
- 一种无人机攻击移动目标俯冲飞行半实物仿真系统及方法