智能蒸汽煮面机
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及一种互联网控制设备,更具体地说,涉及一种智能蒸汽煮面机。
背景技术
现有的面食餐饮行业,大部分都是用锅炉烧开热水,然后将面食放置热水中进行蒸煮,然后再捞出开始配调料,最终成为一美味的面食。在这整个过程,都是需要人工去完成一连串操作,不仅辛苦而且效率比较低,而且整个制作过程对面食的卫生也是难以保证的,面食原料和所有调味料完全暴露外环境中,容易细菌滋生和病毒传播风险,另外,互联网时代也在召唤能够进行网络下单并自动煮面的智能煮面机。
发明内容
本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种智能蒸汽煮面机。
本发明解决其技术问题所采用的技术方案是:
智能蒸汽煮面机,包括柜体,所述柜体内部被分隔为下部的用于储存面碗的冷冻区和上部的加工区;
所述冷冻区内设置有存料架、四轴取料结构和取面口自动门,所述存料架用于定位存放面碗,所述四轴取料结构用于抓取面碗并送至所述取面口自动门下方;
所述加工区内设置有过渡区,所述过渡区与所述冷冻区间设置有所述取面口自动门,所述过渡区内设置有取料注料模组,所述取料注料模组用于将所述取面口自动门下方的面碗升高至所述过渡区内并向所述面碗内注入调料;
所述加工区内还设置有横向运输模组、高度提升模组和煮面机构,所述横向运输模组用于将已注入调料的面碗运输到所述高度提升模组的平台上,所述高度提升模组用于升降所述面碗以使所述煮面机构的水汽共用出口插入所述面碗或抽出所述面碗,所述煮面机构用于向所述面碗内注入开水和蒸汽。
本发明的有益效果在于:
本发明采用包含面食库存、精密运动机构、新型蒸煮方式和出餐为一体的整机技术设备,降低了商铺运营及人工成本;食品和调料冷藏封闭处理,使食品更安全;采用蒸汽式煮面,能耗更低,热效应转化率更高;同时大大降低了煮面的时间,提高了效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图及实施例对本发明作进一步说明,下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
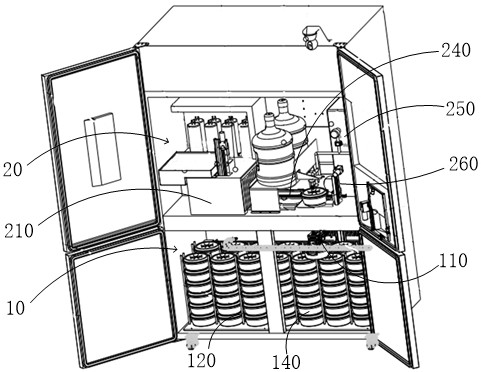
图1是本发明较佳实施例的煮面机的结构示意图;
图2是本发明较佳实施例的煮面机的另一结构示意图;
图3是本发明较佳实施例的四轴取料结构的结构示意图;
图4是本发明较佳实施例的过渡区的剖视示意图;
图5是本发明较佳实施例的横向运输模组的示意图;
图6是本发明较佳实施例的注管底座的示意图;
图7是本发明较佳实施例的煮面机构的示意图;
图8是本发明较佳实施例的水汽共用出口的示意图。
上述附图中:1、柜体;11、观察窗;12、取餐口;13、监控摄像头;10、冷冻区;110、四轴取料结构;120、存料架;130、取面口自动门;140、面碗;20、加工区;210、过渡区;220、冷库取料模组;230、自动注料模组;240、横向运输模组;250、煮面机构;260、高度提升模组;1101、竖直轴;1102、水平轴;1103、第二电机;1104、第三电机;1105、第一电机;1106、前后轴;1107、第四电机;1108、抓取轴;1109、机械爪;2301、注管底座;23011、注射针管;23012、破盖器;23013、十字尖头;2302、酱料驱动器;2303、储料瓶;2201、升降机构;2202、第五电机;2401、面碗滑道;2402、拨碗弧片;2403、轨道;2404、滑块;2405、第六电机;2406、齿条;2603、七电机;2601、碗平台;2602、提升机构;2501、蒸汽开水机;2502、水桶;25011、开水管;25012、第一电磁阀;25013、蒸汽管;25014、第二电磁阀;25015、水汽共用出口;25016、中空倒锥体。
具体实施方式
为了使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的部分实施例,而不是全部实施例。基于本发明的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
如图1-图2,智能蒸汽煮面机,包括柜体1,柜体1内部被分隔为下部的用于储存面碗140的冷冻区10和上部的加工区20;面碗140内装有待煮的面条,面碗140为密封结构,面条被密封在面碗140内,以便于面碗140的运输和存储。本煮面机的冷冻区10为-18℃冷冻区,用于面碗140及里面的面条低温储藏。
如图1-图2,冷冻区10内设置有存料架120、四轴取料结构110和取面口自动门130。存料架120用于定位存放面碗140,存料架120由PE底板和铝棒光轴组成,PE底板上面开好固定定位孔,一是配合禁锢安装铝棒光轴,二是将PE板固定在柜体底部。面食碗放在铝棒光轴之间,保证准确定位坐标。四轴取料结构110用于抓取面碗140并送至取面口自动门130下方,四轴取料结构110固定于冷冻区10正面对侧空间,保证左右移运动空间。
具体地,如图3,四轴取料结构110包括水平轴1102、竖直轴1101、前后轴1106、抓取轴1108和机械爪1109。机械爪1109分为左右两个上部相互啮合的握爪,两个握爪向内转动实现抓握住面碗140,反之,向外转动实现松开面碗140。机械爪1109与抓取轴1108动力连接,抓取轴1108与机械爪1109的其中一个握爪固定连接,第一电机1105的输出轴与抓取轴1108连接,这样就达到了第一电机1105的正反转来实现机械爪1109对面碗140的抓取或松开的目的。机械爪1109在第二电机1103的驱动下可前后滑动地设置在前后轴1106上,前后轴1106在第三电机1104的驱动下可上下滑动地设置在竖直轴1101上,竖直轴1101在第四电机1107的驱动下可水平滑动地设置在水平轴1102上。这样,控制器通过控制第二电机1103、第三电机1104和第四电机1107的转动,就能够使机械爪1109移动到冷冻区10内的任意位置;控制器通过控制第一电机1105,就能够使机械爪1109实现抓取面碗140。也就是说,通过该四轴取料结构110,在控制器的控制下,能精确抓取存料架120上的面碗140,然后送到取面口自动门130下方。
如图4-图6,参考图1-图2,加工区20内设置有过渡区210,过渡区210与冷冻区10间设置有取面口自动门130,过渡区210内的温度范围为-18℃冷冻到常温。取面口自动门130由控制器控制,当面碗140在冷库取料模组220的运送下在过渡区210和冷冻区10间切换时,取面口自动门130打开。过渡区210内设置有取料注料模组,取料注料模组用于将取面口自动门130下方的面碗140升高至过渡区210内并向面碗140内注入调料。
具体地,如图4-图5,取料注料模组包括冷库取料模组220和自动注料模组230。冷库取料模组220用于将取面口自动门130下方的面碗140升高至过渡区210内,自动注料模组230用于向面碗140内注入调料。如图5,冷库取料模组220包括第五电机2202和升降机构2201,升降机构2201与第五电机2202动力连接,第五电机2202驱动升降机构2201的载碗台上下运动。从而四轴取料结构110抓取存料架120上的面碗140后放到该载碗台上,由冷库取料模组220将该面桶提升到过渡区210内。
如图4、图6,自动注料模组230包括注管底座2301、注射针管23011、破盖器23012、酱料驱动器2302和储料瓶2303,注射针管23011和破盖器23012安装在注管底座2301上,注射针管23011、酱料驱动器2302和储料瓶2303之间以导管连接,储料瓶2303设置在冷藏区内,冷藏区温度为-5℃。如图1-图2,柜体1顶部空间内置有制冷机组,该制冷机组负责对冷藏区和冷冻区10进行制冷。酱料驱动器2302受控制器控制,为储料瓶2303的酱料向注射针管23011流动提供动力,在该实施例中,共设置有10个注射针管23011、10个酱料驱动器2302和10个储料瓶2303,可以向面碗140内最多加入10类酱料,消费者在手机APP上下单时,能够选择酱料的种类和剂量。控制器在接收手机APP订单指令后,根据订单内容控制相应的酱料驱动器2302注入相应剂量和种类的酱料。破盖器23012的下端设置有十字尖头23013,用于将面碗140的上部破出十字开口,十字开口具有自动闭合避免敞口的优点,比较卫生。
注料针管23011和破盖器23012采用螺纹连接于注管底座2301上,注管底座2301采用螺栓固定在过渡区210(-18℃冷冻到常温)内壁顶部,在冷库取料模组220上升过程,注射针管23011先扎穿碗盖,进行注料,同时破盖器23012在注料针管插入碗盖内5mm时,由于冷库取料模组220继续上升,这时破盖器23012完成破盖动作。碗盖上十字缝最长约为25-30mm,为后面煮面提前开好热水和蒸汽入口。
如图1-图2,加工区20内还设置有横向运输模组240、高度提升模组260和煮面机构250,横向运输模组240用于将已注入调料的面碗140运输到高度提升模组260的平台上,高度提升模组260用于升降面碗140以使煮面机构250的水汽共用出口插入面碗140或抽出面碗140,煮面机构250用于向面碗140内注入开水和蒸汽。
如图5,具体地,横向运输模组240包括滑块2404、轨道2403、齿条2406、第六电机2405、拨碗弧片2402和面碗滑道2401。滑块2404可滑动地设置在轨道2403上,第六电机2405和拨碗弧片2402设置在滑块2404上,第六电机2405的动力输出端与齿条2406啮合。滑块2404在轨道2403上滑动时,拨碗弧片2402拨动面碗140在面碗滑道2401上滑动。当面碗140注料完成后,升降机构2201的载碗台下降到面碗140底部与面碗滑道2401同高度时,控制器发出指令控制第六电机2405运转,拨碗弧片2402沿着轨道2403运动,推动面碗140经面碗滑道2401进入到下一机构的碗平台2601上,横向运输模组240完成指令后,自动返回零点。
如图5、图7,高度提升模组260包括第七电机2603、碗平台2601和提升机构2602,碗平台2601上下滑动地设置在提升机构2602上,第七电机2603与碗平台2601动力连接。如图7-8,煮面机构250包括蒸汽开水机2501和水桶2502。蒸汽开水机2501和水桶2502以管道连接,蒸汽开水机2501上设置有开水管25011和蒸汽管25013,开水管25011和蒸汽管25013与水汽共用出口25015连接,开水管25011和蒸汽管25013上分别设置有第一电磁阀25012和第二电磁阀25014,水汽共用出口25015上还设置有中空倒锥体25016。第七电机2603、第一电磁阀25012和第二电磁阀25014均与控制器电连接。蒸汽开水机2501为定制的现有技术设备,其内置有电加热的开水区和蒸汽区。
蒸汽开水机2501位于中层平台上正面右侧靠内位置,螺栓固定于中层平台上。特制的水汽共用出口25015,采用便捷式螺纹接口,与蒸汽开水机2501管道接通,且固定在便捷式螺纹接口固定架上。当高度提升模组260上升高度,使水汽共用出口25015被动式通过碗盖中心破口处进入面碗140内,待水汽共用出口25015底部与碗内底部距离10-15mm时,开始注入定量热水,热水注完后开始注入高温高压蒸汽,进行煮面过程,过程2-3min完成。煮面完成后,高度提升模组260的碗平台2601下降至水汽共用出口25015底部刚好出碗内液面以上5mm左右,开热蒸汽冲2秒,作用为洗净被油和酱料污染的管口,保证每次水汽共用出口25015都是干净卫生的。
如图1-图2,柜体1上还设置有柜门,柜门上设置有观察窗11和取餐口12,观察窗11采用玻璃制成,便于消费者观察内部煮面过程。取餐口12由控制器控制,煮面完成后自动打开,便于消费者取用。一般地,柜体1上还设置有用于远程监控的监控摄像头13。
该煮面机内部的控制器内置有无线信号接收模块,用于接收手机APP发出的订单指令,控制器根据该订单指令,通过控制与该控制器电连接的第一电机1105、第二电机1103、第三电机1104和第四电机1107,抓取面碗140后放置在升降机构2201的载碗台上;然后控制与该控制器电连接第五电机2202,提升面碗140,同时,根据订单加料要求启动相应的酱料驱动器2302进行加酱料;加酱料完毕后,通过控制与该控制器电连接的第六电机2405,将面碗输送到碗平台2601上;通过控制与该控制器电连接的第七电机2603使碗平台2601上升;通过控制与该控制器电连接的第一电磁阀25012和第二电磁阀25014完成向面碗140内注入开水和蒸汽进行煮面;煮面完成后,控制取餐口12打开,消费者取餐。整个过程从食客下订单到取餐,整个过程经过严格设计计算,不同的面食制作时间控制再3-5min,而且是稳定连续制作。嵌入式控制系统以及小程序APP,时刻监控和反馈智能蒸汽煮面机内部运行情况和商家多点同时线上线下运营情况,让人们更亲近感受科技给我们生活到来的方便和意义。
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
- 智能蒸汽煮面机
- 一种带物理散热冷凝蒸汽的煮面机