一种智能化多轴位移及回转装置
文献发布时间:2023-06-19 12:16:29
技术领域
本发明属于流体动力学试验设施的技术领域,尤其涉及一种智能化多轴位移及回转装置,用于实现水声接收装置和水声发射装置之间相对空间位置变换。
背景技术
水声工程技术发展的快慢直接关系着现代化国防日新月异的建设进程。在水中兵器的研制过程中,水声接收装置灵敏度是一项极其重要的技术指标。
目前我国水声工程中应用的控制技术,还仅限于经典的确定性系统和理论,使用的技术工具也大多为机电式,少量为电子式,所发挥的控制作用只不过是人类感官的延伸——代替或简化人的操作。例如,有的噪音站,其目标自动搜索跟踪系统仅起到转动波束(基阵或补偿盘)对单个目标进行自动搜索和跟踪的作用。而现代控制理论和方法,则以现代微型计算机作为工具,不仅仅起到人的感官延伸作用、而且能部分地替代人的推理,判别、指挥、决策和组织作用,使各类装置具有更大的活力。
在高校及科研院进行水声工程试验时,需要在消声水池中模拟实际的海洋水下环境对水声接收装置的灵敏度进行测试,而采用传统的水声工程控制技术所得到的灵敏度不能满足实验要求。
发明内容
本发明的目的是提供一种智能化多轴位移及回转装置,采用计算机伺服控制技术对消声水池测试系统进行数字化控制,精确定位测试装置的位置及速度,极大地提升了消声水池测试系统的测试效果和测试效率,进而提高水声接收装置的灵敏度测试。
为解决上述问题,本发明的技术方案为:
一种智能化多轴位移及回转装置,用于实现水声接收装置和水声发射装置之间相对空间位置变换,其特征在于,所述智能化多轴位移及回转装置包括:X轴移动部、Y轴移动部、Z轴升降部、Z轴回转部及伺服控制器;
所述X轴移动部包括车体框架、第一伺服电机、限位开关及激光测距传感器,所述第一伺服电机与所述伺服控制器连接,驱动所述车体框架沿X轴移动;所述限位开关设于所述车体框架的一侧,对所述车体框架提供保护并进行零点标定;所述激光测距传感器设于所述车体框架的前端,用于监测X轴移动部的位置;
所述Y轴移动部包括车轮底座、第二伺服电机及接近开关,所述车轮底座设于所述X轴移动部的车体框架的轨道上,所述第二伺服电机与所述伺服控制器连接,驱动所述车轮底座沿Y轴移动;所述接近开关设于所述Y轴移动部的一侧,对所述Y轴移动部提供保护并进行零点标定;
所述Z轴升降部设于所述Y轴移动部的车轮底座上,所述Z轴升降部包括升降基座、升降套筒、导柱、第三伺服电机及梯形丝杆,所述导柱固设于升降基座上,所述升降套筒套设于所述导柱上,所述第三伺服电机与所述伺服控制器连接,驱动所述升降基座沿所述导柱做沿Z轴的升降运动;
所述Z轴回转部设于所述升降基座上,所述Z轴回转部包括第四伺服电机、蜗轮蜗杆减速机、回转轴及角度编码器,所述第四伺服电机与所述伺服控制器连接,带动所述蜗轮蜗杆减速机运行,产生力矩,并将力矩传递至所述回转轴,通过设于所述回转轴上的所述角度编码器,控制所述Z轴回转部的转角及转速。
根据本发明一实施例,所述X轴移动部的车体框架的前、后两端各设置一个清轨器,清除所述X轴移动部行进轨道上的杂物。
根据本发明一实施例,所述X轴移动部的车体框架上设有多套防倾翻装置,防止因水体阻力较大而发生倾翻。
根据本发明一实施例,所述防倾翻装置包括对称设置的两组防倾翻组件,所述X轴移动部的轨道上行进时,所述两组防倾翻组件位于轨道钢轨的两侧,将轨道钢轨夹于中间,防止倾翻。
根据本发明一实施例,所述防倾翻组件包括销轴、轴承及防倾翻钢板,通过所述销轴将所述防倾翻钢板与所述轴承连接,并固定于所述X轴移动部的车体框架的底部。
根据本发明一实施例,所述X轴移动部的车体框架上设有活动门,所述活动门上设有行程开关,所述行程开关在所述活动门关闭的情况下,导通所述第一伺服电机的电路。
根据本发明一实施例,所述X轴移动部的车体框架为钢铁骨架,所述车体框架长2.8m,宽6.5m。
本发明由于采用以上技术方案,使其与现有技术相比具有以下的优点和积极效果:
本发明一实施例中的智能化多轴位移及回转装置,集X、Y轴行走、Z轴升降、Z轴回转于一身,通过伺服控制技术实现全自动化位置反馈,具有良好的控制精度,有助于实现水声接收装置和水声发射装置之间相对空间位置变换,从而使测试环境更加接近于真实的工作声场。由于该装置的位置精度和速度精度非常高,因此,其测试数据和位置数据的采样密度较高,进而相应的灵敏度曲线分辨率就高。
附图说明
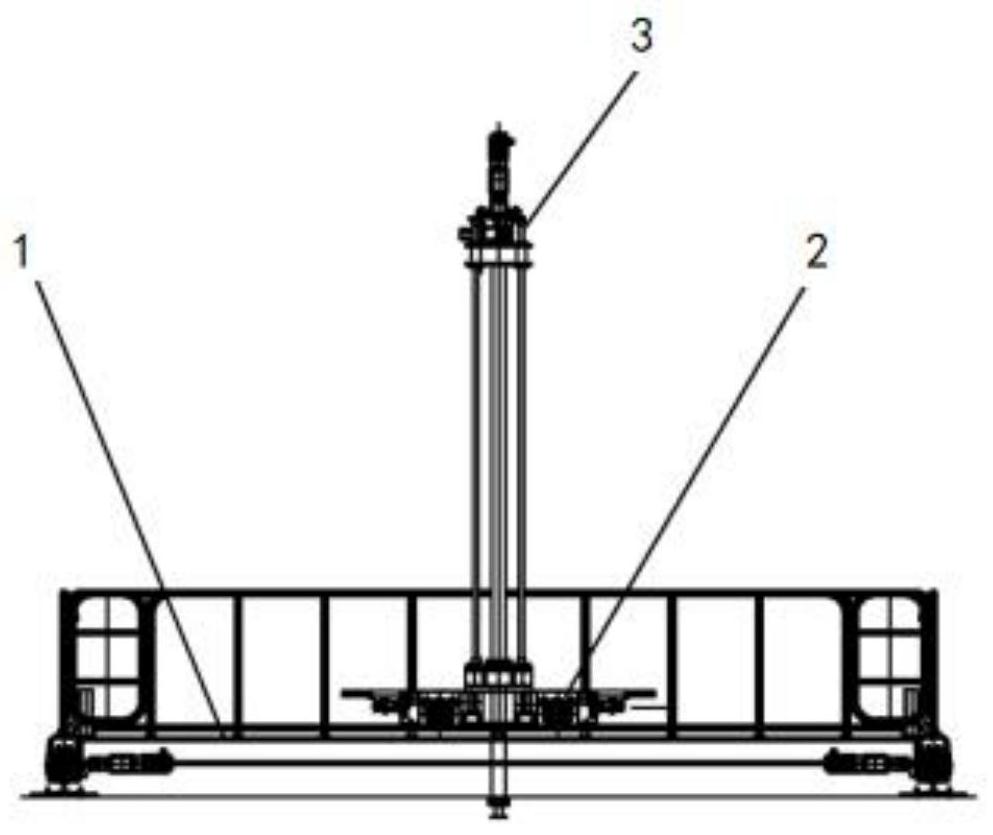
图1为本发明一实施例中的智能化多轴位移及回转装置的结构示意图;
图2为本发明一实施例中的X轴移动部的结构示意图;
图3为本发明一实施例中的防倾翻装置的结构示意图;
图4为本发明一实施例中的Y轴移动部的结构示意图;
图5为本发明一实施例中的Z轴升降及回转部的结构示意图;
图6为本发明一实施例中的伺服控制系统的示意图。
附图标记说明:
1:X轴移动部;101:车体框架;102:轨道及车轮组件;103:联轴器;104:行星减速器;105:第一伺服电机;106:行程开关;107:激光测距传感器;108:接近开关;109:车体定位器;110:清轨器;111:防倾翻装置;1111:销轴;1112:轴承;1113:防倾翻钢板;112:车体栏杆;113:活动门;114:防撞部;115:机械限位;2:Y轴移动部;201:主体框架;202:车轮;203:联轴器;204:齿轮减速器;205:第二伺服电机;206:接近开关;207:定位器;208:清轨器;209:防倾翻装置;210:防撞部;211:机械限位;3:Z轴升降及回转部;301:固定基座;302:升降基座;303:升降套筒;304:联轴器;305:行星减速器;306:升降伺服电机;307:梯形丝杆;308:螺母;309:直线轴承;310:导柱;311:回转伺服电机;312:蜗轮蜗杆减速机;313:回转轴;314:锁紧装置。
具体实施方式
以下结合附图和具体实施例对本发明提出的一种智能化多轴位移及回转装置作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。
本实施例提供了一种智能化多轴位移及回转装置,集X、Y轴行走、Z轴升降、Z轴回转于一身,结合伺服控制技术实现了全自动化位置反馈,并可以根据预设定的多种路径曲线实现多轴的智能化控制,可实现水声接收装置和水声发射装置之间相对空间位置变换。该装置具有良好的控制精度,可携带负载用于多种试验场合,为高校及科研院所提供良好的水声工程试验平台。
具体的,请参看图1,该智能化多轴位移及回转装置,包括X轴移动部1、Y轴移动部2、Z轴升降及回转部3及伺服控制器。
其中,X轴移动部1包括车体框架101、轨道及车轮组件102、联轴器103、行星减速机104、第一伺服电机105、行程开关106、激光测距传感器107、接近开关108、车体定位器109、清轨器110、防倾翻装置111、车体栏杆112、活动门113、防撞部114、机械限位115,请参看图2(主视图a、侧视图b、俯视图c)。
该X轴移动部1可作为消声水池测试系统的主试验平台,为Y轴移动部2提供安装基座。实际应用中,该X轴移动部1可以是具有车辆结构的移动体,可在水池两侧的轨道上行进。
该X轴移动部1的车体框架101采用钢铁骨架构成,具有足够的强度,提供支撑。该车体框架101的底部安装有四套轨道及车轮组件102,使车体能在水池两侧的轨道上移动。第一伺服电机105及行星减速机104通过联轴器103与轨道及车轮组件102相连,其中,第一伺服电机105与伺服控制器连接,受伺服控制器驱动。在实际应用中,用户可通过伺服控制器下达精确的行动指令,驱动第一伺服电机105沿X轴行进固定的距离。为了更好的控制X轴移动部1,可在车体框架101上设置两套伺服电机,分别用于X轴正、反方向的行程控制。
车体框架101的前端安装有激光测距传感器107,可实时监测X轴移动部1的位置,并可将获取的监测位置数据传递给伺服控制器,为伺服控制器提供数据基础。
车体框架101的一侧安装有接近开关108,接近开关108是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而给伺服控制器(plc)提供控制指令,可为车体移动提供保护并进行零点标定。为了更好的进行定位,在实际应用中,还可以设置车体定位器109。
车体框架101的两侧前后位置均设置有清轨器110,有助于清除轨道上的杂物,确保移动大车平稳运行。
车体框架101的底部设置有多套防倾翻装置111,防止因水体阻力较大而发生倾翻。该防倾翻装置111包括对称设置的两组防倾翻组件,当X轴移动部的轨道上行进时,两组防倾翻组件位于轨道钢轨的两侧,将轨道钢轨夹于中间,防止倾翻。请参看图3,每组防倾翻组件包括销轴1111、轴承1112及防倾翻钢板1113,通过销轴1111将防倾翻钢板1113与轴承1112连接,并固定于X轴移动部1的车体框架101的底部。
车体框架101上安装有车体栏杆112、活动门113,活动门113上设置有行程开关106,用于在活动门113关闭的情况下,导通第一伺服电机105的电路。该行程开关106利用活动门113与车体栏杆112的碰撞使其触头动作来实现接通或分断控制电路,达到一定的控制目的,加强人身及装置安全。
为了使X轴移动部1更加稳固,可在车体框架101上设置防撞部114及机械限位115。其中,防撞部114可采用柔软的弹性材料(海绵、硅胶等)制成。
该X轴移动部1的车体长度可做成2.8m,宽6.5m;可在车体框架101上铺设防滑钢板,设置双侧人员行走、观察通道。
Y轴移动部2包括主体框架201、车轮202、联轴器203、齿轮减速机204、第二伺服电机205、接近开关206、车体定位部207、清轨器208、防倾翻装置209、防撞部210、机械限位211,请参看图4(主视图a、侧视图b、俯视图c)。
该Y轴移动部2位于X轴移动部1的车体框架101的轨道上,主体框架201采用型钢骨架构成,具有足够的强度提供支撑。该主体框架201的底部安装有车轮202,使其能在X轴移动部1的轨道上移动。第二伺服电机205及齿轮减速机204通过联轴器203与车轮202相连,其中,第二伺服电机205与伺服控制器连接,受伺服控制器驱动。在实际应用中,用户可通过伺服控制器下达精确的行动指令,驱动第二伺服电机205沿Y轴行进固定的距离。
主体框架201的一侧安装有接近开关208,接近开关208是一种无需与运动部件进行机械直接接触而可以操作的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而给伺服控制器(plc)提供控制指令,可为车体移动提供保护并进行零点标定。为了更好的进行定位,在实际应用中,还可以设置车体定位器207。
主体框架201的两侧前后位置均设置有清轨器208,有助于清除轨道上的杂物,确保移动大车平稳运行。
主体框架201的底部设置有多套防倾翻装置209,防止因水体阻力较大而发生倾翻。该防倾翻装置209包括对称设置的两组防倾翻组件,当Y轴移动部的轨道上行进时,两组防倾翻组件位于轨道钢轨的两侧,将轨道钢轨夹于中间,防止倾翻。请参看图3,每组防倾翻组件包括销轴1111、轴承1112及防倾翻钢板1113,通过销轴1111将防倾翻钢板1113与轴承1112连接,并固定于Y轴移动部2的主体框架201的底部。
为了使Y轴移动部2更加稳固,可在主体框架201上设置防撞部210及机械限位211。其中,防撞部210可采用柔软的弹性材料(海绵、硅胶等)制成。
该Y轴移动部2可为Z轴升降及回转部3提供安装基座,实际应用中,Y轴移动部2的主体长度可为1.5m,宽度为1.2m。
Z轴升降及回转部3包括升降装置及回转装置,请参看图5(左图为主视图,右图为后视图),其中,升降装置主要由固定基座301、升降基座302、升降套筒303、升降伺服电机306(即第三伺服电机)及行星减速机305、联轴器304、梯形丝杆307及螺母308、导柱310及直线轴承309、接近开关等组成。升降装置采用梯形丝杆螺母机构+导柱及直线轴承组合的方式,升降行程最大可达3000mm。梯形丝杆螺母机构具备较好的综合传动性能,如精度高、传动噪声小、减速比大等。另外,梯形丝杆上的梯形齿本身带有自锁功能,当然,也可在升降套筒303外部装配锁紧装置314。
该升降装置,即Z轴升降部,其位于Y轴移动部2的主体框架201的底座上,采用升降伺服电机306,根据用户下达的指令,为升降装置沿Z轴至任意位置提供驱动力。该升降装置的升降基座302套设于导柱310上,升降伺服电机306及行星减速机305通过联轴器304与梯形丝杆307相连。其中,升降伺服电机306与伺服控制器连接,受伺服控制器驱动。梯形丝杆307通过螺母308固定于升降基座302之上。该升降装置工作时,伺服控制器驱动升降伺服电机306,带动梯形丝杆307,使升降基座302沿导柱310做升降运动。该升降装置的位置锁定可利用梯形丝杆307自带的自锁功能,也可利用升降套筒303外部设置的专用锁紧装置314来实现。
回转装置主要由回转伺服电机311、蜗轮蜗杆减速机312、回转轴313、接近开关等组成。该回转装置具备0-360°旋转调节功能,采用了大传动比的蜗轮蜗杆传动方式,实现平稳的低速运动。
该回转装置,即Z轴回转部,其位于升降装置的升降基座302上,采用回转伺服电机311,根据用户下达的指令,为回转装置沿Z轴至0-360°范围内任意位置提供驱动力。该回转装置工作时,由回转伺服电机311带动大传动比的蜗轮蜗杆减速机312运行,该蜗轮蜗杆减速机312将力矩传递至回转轴313(由回转拉杆、轴承及密封件组成),通过回转轴313上安装的角度编码器,以控制蜗轮的转角与转速,实现回转轴平稳的低速运动。
该回转装置采用回转伺服电机驱动,以控制蜗轮的转角与转速。在装有蜗轮的回转轴上安装角度编码器,实时检测回转装置的转角,并保证了转角精度;且采用蜗轮蜗杆的传动方式,具有自锁功能。
本实施例提供的智能化多轴位移及回转装置,在实际应用中,采用三相五线制,可设置一套电气控制柜,柜内安装配电开关若干、PLC、电机驱动器及各类保护和指示电气装置。其电气系统结构如附图6所示,使用PLC控制电机驱动器,控制X,Y,Z各个方向电机的运动,让装置按照要求动作。操作员可以在触摸屏上输入装置行走的距离或坐标,点击确认后,装置自动运行到相应的位置。
结合工程案例的实际应用,该智能化多轴位移及回转装置不仅实现了全自动化位置反馈,并可以根据预设定的多种路径曲线实现多轴的智能化控制。同时,由于该装置采用稳定的底座、框架式导向结构、全伺服驱动机构及多项安全措施(行程开关、接近开关、防倾翻装置等),使得其具有多轴、大行程、高精度、安全稳定运行等优良特点,可携带负载用于多种试验场合。不仅可应用于消声水池水声工程测量,还可与多分力测量装置配套检测出模型的各种工况参数。由于该装置采用伺服控制技术进行智能化控制,所以测试数据和位置数据的采样密度较高,相应的灵敏度曲线分辨率很高,极大地提升了测试效果和测试效率。
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式。即使对本发明作出各种变化,倘若这些变化属于本发明权利要求及其等同技术的范围之内,则仍落入在本发明的保护范围之中。
- 一种智能化多轴位移及回转装置
- 多轴心重叠面的双角位移构成座标位移驱动的方法和装置