基于电池参数解析的电机转矩补偿控制方法
文献发布时间:2023-06-19 12:16:29
技术领域:
本发明涉及的是纯电动汽车永磁同步电机转矩补偿驱动控制方法,具体涉及的是基于电池参数解析的电机转矩补偿控制方法。
背景技术:
动力电池随着电动汽车行驶路程的增加,电池的荷电状态会随之减小,永磁同步电机的驱动性能也随之发生变化。
目前缺少蓄电池特定参数在电机控制中的介入,用来评价电机驱动性能或直接通过电池参数的引入来提高电机的驱动特性。
发明内容:
本发明的目的是提供基于电池参数解析的电机转矩补偿控制方法,这种基于电池参数解析的电机转矩补偿控制方法用于电动汽车特殊工况(启动、爬坡、加速等)启动控制性能研究实验。
本发明解决其技术问题所采用的技术方案是:这种基于电池参数解析的电机转矩补偿控制方法包括如下步骤:
步骤一、建立纯电动汽车转矩控制模型,电动汽车转矩控制器根据驱动转矩指令确定驱动转矩,驱动需求转矩表示为由加速踏板开度及其开度变化率、车速和动力电池SOC组成的函数:
式中θ(k)为此时刻加速踏板开度;
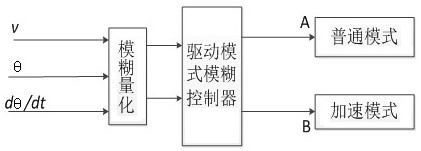
步骤二、纯电动汽车转矩控制策略,采用驱动模式模糊控制器,将电动汽车的驱动模式分为普通模式和加速模式,并在加速模式下引入驱动补偿转矩,具体如下:
a)驱动模式判定模糊控制器:
驱动模式分为普通模式A和加速模式B,将驱动模式模糊控制器设计为三个输入变量和两个输出变量的三维模糊控制器,
驱动模糊控制的输入:加速踏板开度θ的模糊集论域为[0,1],将模糊子集分为五个级别,分别是极小、小、中、大、极大,记作{VS,S,M,L,VL};加速踏板开度变化率取值
驱动模式模糊控制的输入:普通模式和加速模式的模糊值为0和1,模糊子集分为两个级别,记作{A}和{B},输入变量和输出变量的隶属度函数均为三角函数;
驱动模式模糊规则为:加速踏板开度变化率越大,对加速需求的紧急程度越高,补偿转矩越大;加速踏板变化角度越大,则期望达到的速度越大,采用补偿转矩来提高加速性能;在车速较低的情况下,应采用补偿转矩来提高加速性能,在车速达到较高水平时,应减小转矩补偿或使补偿转矩归零;
普通驱动模式采用传统控制策略,驱动转矩与油门踏板开度θ成线性关系,普通驱动模式下的驱动转矩T
T
式中:T
加速驱动模式以普通驱动模式下的驱动转矩为基准转矩,并附加上补偿转矩以获得足够的驱动转矩,加速驱动模式下的驱动转矩T
T
式中:ΔT为补偿转矩;
b)电动汽车在加速过程中产生的冲击度对驾驶的舒适性有很大的影响,因此,根据冲击度的极限确定最大补偿转矩,车辆冲击度的约束条件为j≤10m·s
式中:T
考虑到动力电池的电量对永磁同步电机输出转矩的影响,将动力电池的荷电状态引入到补偿转矩模糊控制中,对补偿转矩模糊控制器采用三个输入变量和一个输出变量的设计:
补偿转矩模糊控制的输入:荷电状态SOC的模糊集论域为[0,1],模糊子集分为三个级别,分别是低、中、高,记作{S,M,L,};加速踏板开度θ和加速踏板开度变化率取值
补偿转矩模糊控制规则,从动力电池荷电状态SOC的角度来看,当荷电状态较低时,减小补偿转矩的输出,节约电量,提高续航里程;当荷电状态较高时,适当增加补偿转矩的需要,满足加速需求。
上述方案中建立纯电动汽车转矩控制模型的具体方法为:
a)电动汽车在行驶过程中,永磁同步电动机的转矩通过电动汽车的传动系统转化为牵引力F
式中:v为车速;m为汽车重量;i为电动汽车总传动比;r为电动汽车轮胎的滚动半径;η为传动系统总效率;T
b)根据永磁同步电机的工作特性,永磁同步电机的驱动力矩与永磁同步电机的转速相关,其数学模型为:
式中:T
c)永磁同步电机根据驱动转矩指令产生驱动转矩,根据永磁同步电机最大转矩和驱动需求转矩,永磁同步电机输出转矩表达式为:
Tm=min(T
式中:T
d)由于电动汽车的加速踏板的信号是模拟量,所以为了保持加速信号的稳定性,对加速踏板开度进行增量式调节处理:
θ(k)=θ(k-1)+Δθ(k)
式中:θ(k)、θ(k-1)分别为本时刻和上一时刻的加速踏板开度;Δθ(k)为加速踏板开度增量;
驾驶员的加速意图通过加速踏板相对开度及其开度变化率来反映;
加速踏板开度变化率定义为:
式中:t
将加速踏板开度范围设置为0~100%,设定加速踏板开度最大变化率为100%,超过最大变化率按最大值计算;
e)为了便于分析动力电池特性,选取动力电池Rint等效电路模型,根据Rint等效电路模型得:
U
式中:U
采用安时积分法估计电池的SOC
式中:SOC
初始荷电状态SOC
f)电动汽车转矩控制器根据驱动转矩指令确定驱动转矩,驱动需求转矩表示为由加速踏板开度及其开度变化率、车速和动力电池SOC组成的函数:
本发明具有以下有益效果:
本发明基于模糊控制,提出了两种模糊控制规则,分别是驱动模式模糊控制规则和补偿转矩模糊控制规则。考虑到电动汽车在行驶过程中,动力电池组荷电状态对电机输出转矩的影响,因此将动力电池的荷电状态作为补偿转矩模糊控制器的输入量之一。仿真结果表明,与传统控制策略相比,该模糊控制策略能在不同的加速需求下选择合适的驱动模式,更加合理的利用动力电池电量,并且提升了电动汽车的加速性能,缩短了加速所需时间,提高了电动汽车的驾驶操作感和续航里程。
附图说明:
图1为驱动模式控制算法图;
图2为补偿转矩控制算法图;
图3为加速踏板开度;
图4为驱动模式识别;
图5为加速模式下电机转速变化曲线;
图6为加速模式下输出转矩变化曲线;
图7为普通模式下电机转速变化曲线。
具体实施方式:
下面结合附图对本发明做进一步的说明:
这种基于电池参数解析的电机转矩补偿控制方法包括如下步骤:
步骤一、建立纯电动汽车转矩控制模型:
a)电动汽车在行驶过程中,永磁同步电动机的转矩通过电动汽车的传动系统转化为牵引力F
式中:v为车速;m为汽车重量;i为电动汽车总传动比;r为电动汽车轮胎的滚动半径;η为传动系统总效率;T
b)根据永磁同步电机的工作特性,永磁同步电机的驱动力矩与永磁同步电机的转速相关
式中:T
c)永磁同步电机根据驱动转矩指令产生驱动转矩,但是为了电机安全运行,根据永磁同步电机最大转矩和驱动需求转矩,永磁同步电机输出转矩表达式为:
T
式中:T
d)由于电动汽车的加速踏板的信号是模拟量,所以为了保持加速信号的稳定性,对加速踏板开度进行增量式调节处理:
θ(k)=θ(k-1)+Δθ(k) (5)
式中:θ(k)、θ(k-1)分别为本时刻和上一时刻的加速踏板开度;Δθ(k)为加速踏板开度增量。
驾驶员的加速意图通过加速踏板相对开度及其开度变化率来反映。
加速踏板开度变化率定义为:
式中:t
为了便于研究将加速踏板开度范围设置为0~100%,为确保驾驶的舒适度,设定加速踏板开度最大变化率为100%,超过最大变化率按最大值计算。
e)为了便于分析动力电池特性,选取Rint等效电路模型。根据电路模型可得
U
式中U
采用安时积分法估计电池的SOC
式中:SOC
初始荷电状态SOC
f)电动汽车转矩控制器根据驱动转矩指令确定驱动转矩,驱动需求转矩可以表示为由加速踏板开度及其开度变化率、车速和动力电池SOC组成的函数。
步骤二:纯电动汽车转矩控制策略:
a)驱动模式判定模糊控制器
驱动模式分为普通模式A和加速模式B。将驱动模式模糊控制器设计为三个输入变量和两个输出变量的三维模糊控制器。驱动模式控制算法如图1所示。
驱动模糊控制的输入:加速踏板开度θ的模糊集论域为[0,1],将模糊子集分为五个级别,分别是极小、小、中、大、极大,记作{VS,S,M,L,VL};加速踏板开度变化率取值
驱动模式模糊控制的输入:普通模式和加速模式的模糊值分别为“0”和“1”,模糊子集分为两个级别,记作{A}和{B}。输入变量和输出变量的隶属度函数均为三角函数。
模糊规则通常根据一般的操作经验或控制意图来制定,建立模糊规则。加速踏板开度变化率越大,则对加速需求的紧急程度越高,因此补偿转矩越大。对加速踏板角度来说,加速踏板变化角度越大,则期望达到的速度越大,因此采用补偿转矩来提高加速性能。从电动汽车的车速出发,在车速较低的情况下,应采用补偿转矩来提高加速性能。当车速达到较高水平时,应减小转矩补偿或使补偿转矩归零。因此根据驱动转矩的变化确定驱动模糊控制规则如表1所示。
表1驱动模式模糊控制规则表
普通驱动模式采用传统控制策略。该转矩控制策略简单,驱动转矩与油门踏板开度θ成线性关系。普通驱动模式下的驱动转矩可表示为:
T
加速驱动模式比普通驱动模式有更大的转矩需求,因此以普通驱动模式下的驱动转矩为基准转矩,并附加上补偿转矩以获得足够的驱动转矩。加速驱动模式下的驱动转矩可表示为:
T
式中:ΔT为补偿转矩。
b)电动汽车在加速过程中产生的冲击度对驾驶的舒适性有很大的影响。因此,需要根据冲击度的极限确定最大补偿转矩。冲击度的表达式为
由上式可得
车辆冲击度的约束条件为j≤10m·s
考虑到动力电池的电量对永磁同步电机输出转矩的影响,将动力电池的荷电状态引入到补偿转矩模糊控制中。与驱动模式模糊控制类似,对补偿转矩模糊控制器采用三个输入变量和一个输出变量的设计。补偿转矩控制算法如图2所示。
补偿转矩模糊控制的输入:荷电状态(SOC)的模糊集论域为[0,1],模糊子集分为三个级别,分别是低、中、高,记作{S,M,L,};加速踏板开度θ和加速踏板开度变化率取值
补偿转矩模糊控制规则与驱动模式模糊控制规则类似。从动力电池荷电状态(SOC)的角度来看,当荷电状态较低时,应当减小补偿转矩的输出,节约电量,提高续航里程。当荷电状态较高时,可以适当增加补偿转矩的需要,满足加速需求。因此,根据加速所需补偿转矩的大小建立如表2所示的补偿转矩模糊控制规则表。
表2补偿转矩模糊控制规则表
为了电动汽车启动时更加合理的利用动力电池的能量和提升电动汽车的驾驶体验,将电动汽车的驱动模式分为普通模式和加速模式,并在加速模式下引入驱动补偿转矩。由于驱动模式识别和补偿转矩计算很难用精确的数学模型确定,因此传统的控制理论不能很好的实现。模糊控制理论是一种不依赖于数学模型的方法,具有较较强的鲁棒性,为驱动模式识别和补偿转矩计算提供了一种行之有效的方法。
实施例:
根据表3所示电动汽车参数,利用公式(12)可以计算出补偿转矩的最大值。
表3车辆参数
永磁同步电机的理论响应时间为20ms,即Δt=20ms。补偿转矩最大值ΔT为7.5N·m。
采用SP2000和Simulink联合仿真,在Simulink中搭建控制策略模型,烧入到SP2000中,实现通SP2000调用Simulink控制策略进行仿真计算。以加速踏板的时间历程关系来模拟驾驶员的加速操作行为。然后设置如图3所示的简单仿真条件,8s时踏板开度以40%的速率从0增长到80%,之后踏板保持恒定不变,并将动力电池的荷电状态分别设置为100%、80%、50%。
驱动模式识别结果如图4所示。由于初始阶段加速踏板的开度为0,所以将驱动模式识别为普通模式“0”。在t=8s时,加速踏板开度急剧,说明驾驶员有迫切的加速需求,要在短时间内达到期望的速度,因此将驱动模式识别为加速模式“1”。随着车速的增加,加速踏板相对开度减小,并在t=10s时,加速踏板的开度保持恒定,说明此时驾驶员没有继续加速的需求,故将驱动模式识别为普通模式“0”。
为了比较本文模糊控制策略与传统转矩控制的区别。特意选取t=8s后电机转速变化曲线,如图5所示。从图5中可以看出,在不同荷电状态下模糊控制策略与传统控制策略相比较能更快的使永磁同步电机达到期望转速。并且荷电状态越高达到期望转速的时间越短。加速模式下输出转矩变化如图6所示,从图中可以看出模糊控制策略的输出转矩大于传统控制的输出转矩,说明补偿转矩起了加速作用。
为了进一步分析驱动模式控制优势,特意选取设置在普通模式下,模糊控制策略和传统控制策略的区别。电机转速变化如图7所示。普通模式下两种控制策略的加速时间相差不大,并且模糊控制策略下会出现转速的超调。故在普通模式下采用传统控制策略,在加速模式下采用模糊控制策略。
本发明建立一种基于动力电池荷电状态(State of charge SOC)的永磁同步电机转矩补偿驱动控制策略。根据加速踏板开度、加速踏板开度变化率和车辆速度通过模糊控制规则确定驱动模式,驱动模式分为普通模式和加速模式,普通模式采用传统转矩控制策略,加速模式采用补偿转矩模糊控制策略;通过基于动力电池SOC的模糊控制计算加速模式所需补偿转矩,满足驾驶员对电动汽车动力性和可操作性的要求。
- 基于电池参数解析的电机转矩补偿控制方法
- 基于电机转矩补偿的混合动力汽车转矩恢复协调控制方法及系统