基于目标锚框优选策略的交通基建施工目标监测系统与方法
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及交通基建施工监测技术领域,具体为基于目标锚框优选策略的交通基建施工目标监测系统与方法。
背景技术
当前,基于锚框提取和分类的两阶段目标检测方法仍是解决目标精确定位和分类的主流方案,例如R-CNN[1]、Fast R-CNN、Faster R-CNN。该类方法主要通过在特征图候选区域上密集地放置不同尺度、长宽比的锚框,然后根据获取的特征表述对这些锚框进行分类和回归。通常目标的锚框在匹配阈值化后,一个目标对象将有多个粗配准的候选锚框,因此需要利用基于非极大抑制处理对候选结果进行筛选,得到最终唯一的检测框。在R-CNN中,NMS被用来确定最终的锚点框的位置,对每个候选框送入分类器并根据类别分类概率做排序。然而,R-CNN实际需要非常多的候选区域以确保准确度,且很多区域是彼此重叠的。为了,FastR-CNN在此基础上提出了选择性搜索算法,降低前者预设的候选区域个数。但该策略仍依赖外部候选区域方法,为此FasterR-CNN提出了区域生成网络(RPN,RegionProposal Network),在特征图每个点预测多个不同宽高比的锚点框。虽然Faster R-CNN的检测精度较高,但每秒7帧的图像处理效率仍制约着目标检测方法的性能。因此,近些年SSD、YOLO等单阶段目标检测算法被提出,利用不同感受野(或最顶层感受野)的特征图进行锚框分类和位置回归,在一次前向传播过程中同时完成目标的定位和分类任务。可以看出,这种检测方法在时间效率上要优于两阶段目标检测方法。但是,由于锚框的结构依赖于人工经验设置,且小目标的特征来源于浅层网络特征,导致SSD的检测精度不及FasterR-CNN算法。除此之外,无论是单阶段还是两阶段目标检测算法,当面对多类别检测任务时,如果对每类分别进行NMS,那么当检测结果中包含两个被分到不同类别的目标且其IoU较大时,会得到不可接受的结果。
当前,已有部分与本项目相关的基于深度学习目标检测的专利被发表,具体的总结如下:
专利1:《CN110765886A》一种基于卷积神经网络的道路目标检测方法及装置。该专利结合卷积神经网络强大的层级特征图生成能力,利用增强算法来突出目标在各个尺度层级的表征,随后结合增强后的特征融合图像、锚点框和真值信息进行监督训练,实现图像目标检测及定位。该专利的增强特征图使用是重点但也是其缺陷,这主要是因为他、增强算法是一个预设的方案,无法在后续的检测过程根据图像的特征分布、目标多样性进行自适应调整。因此,检测框的定位精度依赖于算法预设方案,无法适用于多样性的建筑体目标。
专利2:《CN111461145A》一种基于卷积神经网络进行目标检测的方法。该专利将锚框区域获取的局部特征图信息输入到卷积预测器,实现对目标边界回归和类别分类。其中,所设计的卷积预测器是通过利用分类正例锚框来训练获得。
因此亟需设计基于目标锚框优选策略的交通基建施工目标监测系统与方法来解决上述问题。
发明内容
本发明的目的在于提供基于目标锚框优选策略的交通基建施工目标监测系统与方法,以解决上述背景技术中提出因素问题。
为实现上述目的,本发明提供如下技术方案:基于目标锚框优选策略的交通基建施工目标监测系统与方法,包括如下系统工序流程:
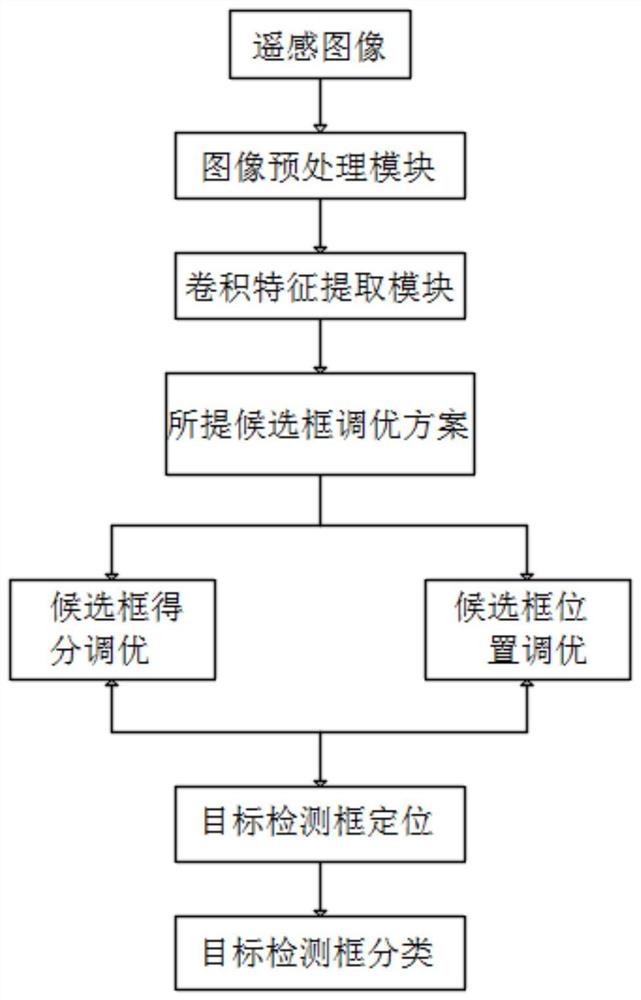
步骤一:通过图像遥感技术进行图像遥感采集,并反馈到内部的图像预处理模块;
步骤二:图像预处理模块对采集的图像进行提取预处理;
步骤三:预处理完毕后,通过卷积特征提取模块提取相应的卷积特征,并通过所提候选框调优方案进行处理;
步骤四:所提候选框调优方案通过候选框得分调优与候选框位置调优进行处理;
设当前候选框为Bi,i=1 (4)计算当前候选框与其他同类别候选框的交并比iou; (5)根据iou,计算其他框对当前框Bi的权重分数,并将自身的得分设置为0; (6)根据得分阈值选择前k个最大得分,并取均值m; 计算sqrt(k*m),获得邻居框对当前框的得分贡献。 (3)候选框位置调优 设当前候选框为Bi,i=1 (3)计算当前候选框与其他同类别候选框的交并比iou; (4)根据iou,计算其他框对当前框Bi对应的权重分数,并根据p[iou 根据 步骤五:调优后,对目标检测框进行定位作业; 步骤六:定位完毕后,对目标检测框的内容进行快速分类,完成检测。 通过上述内容优选的,所述在系统步骤过程中,bbox_refine表示位置调优,score_refine表示得分调优,bbox_priority表示先进性位置调优,再进行得分调优。 通过上述内容优选的,所述在系统步骤过程中,权重分数可以通过p=e-(1-iou)/(2*σ)的计算公式进行计算作业。 通过上述内容优选的,所述在系统步骤过程中,图像遥感技术包括有图像精校正、波段组合及融合、图像镶嵌、匀色、反差调整及地理配准。 通过上述内容优选的,所述在系统步骤过程中,图像预处理模块对于输入图像f(x,y),灰度级变换T将产生一个输出图像g(x,y),且g(x,y)的每一个像素值都是由f(x,y)的对应输入像素点的值决定的,g(x,y)=T(f(x,y)),对对于原图象f(x,y)和灰度值变换函数T(f(x,y)),由于灰度值总是有限个,非几何变换可定义为:R=T(r),其中R、r(0,255)。 通过上述内容优选的,所述在系统步骤过程中,目标检测框定位通过:输入测试图像、利用selective search算法在图像中提取2000个左右的region proposal、将每个region proposal缩放(warp)成227x227的大小并输入到CNN,将CNN的fc7层的输出作为特征、将每个region proposal提取到的CNN特征输入到SVM进行分类定位。 与现有技术相比,本发明的有益效果是: (1)、通过利用图像邻域内候选框信息,实现了构建准确可靠的选择策略,这样的效果不但提升高分辨率遥感图像中基建主体目标的定位精度,同时又保证高分辨率遥感图像中基建主体目标的分类精度,在定位精度与分类精度的双重结合下,有效的确保了本系统可以更好的服务于准确的施工进展评估任务; (2)、通过所提的候选框调优策略,使本系统能够有效提取出具有真实目标的检测框,避免了传统提取不精确、不及时等因素的干扰,更好的缓解检测过程中出现对部分小尺度目标(例如桥墩、路基等)的漏检,保证了本系统的检查范围,避免因部分小尺度目标无法检测或检测遗漏的情况,使其具有良好的实用价值以及推广价值,更好的满足了市场的作业需求。 附图说明 附图1为本工艺的系统流程图; 附图2为基于不同候选框调优方案的目标检测算法对比实验表; 附图3为一阶段与二阶段算法对比实验表。 具体实施方式 下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。 本发明提供的一种实施例: 参照附图1-3,具体为基于目标锚框优选策略的交通基建施工目标监测系统与方法,包括如下结构: 包括如下系统工序流程: 步骤一:通过图像遥感技术进行图像遥感采集,图像遥感技术包括有图像精校正、波段组合及融合、图像镶嵌、匀色、反差调整及地理配准,并反馈到内部的图像预处理模块; 步骤二:图像预处理模块对采集的图像进行提取预处理,图像预处理模块对于输入图像f(x,y),灰度级变换T将产生一个输出图像g(x,y),且g(x,y)的每一个像素值都是由f(x,y)的对应输入像素点的值决定的,g(x,y)=T(f(x,y)),对对于原图象f(x,y)和灰度值变换函数T(f(x,y)),由于灰度值总是有限个,非几何变换可定义为:R=T(r),其中R、r(0,255); 步骤三:预处理完毕后,通过卷积特征提取模块提取相应的卷积特征,并通过所提候选框调优方案进行处理; 步骤四:所提候选框调优方案通过候选框得分调优与候选框位置调优进行处理; 设当前候选框为Bi,i=1 (7)计算当前候选框与其他同类别候选框的交并比iou; (8)根据iou,计算其他框对当前框Bi的权重分数,权重分数可以通过p=e-(1-iou)/(2*σ)的计算公式进行计算作业并将自身的得分设置为0; (9)根据得分阈值选择前k个最大得分,并取均值m; 计算sqrt(k*m),获得邻居框对当前框的得分贡献。 (3)候选框位置调优 设当前候选框为Bi,i=1 (5)计算当前候选框与其他同类别候选框的交并比iou; (6)根据iou,计算其他框对当前框Bi对应的权重分数,权重分数可以通过p=e-(1-iou)/(2*σ)的计算公式进行计算作业,并根据p[iou 根据 将该方案分别引入一阶段和两阶段目标检测方法,对不同尺寸的目标进行检测精度评价,并且bbox_refine表示位置调优,score_refine表示得分调优,bbox_priority表示先进性位置调优,再进行得分调优; 从图2的结果可以发现,本申请所提出的方法在单阶段模型(RetinaNet和SSD)和两阶段模型(FasterRCNN)均取得了更好的检测效果。其中,当两种调优策略均使用后,一阶段模型RetinaNet在性能上可以媲美两阶段模型; 从图3展示了3种不同算法对不同尺寸目标的检测结果。可以看出,当使用了本文所提的优化策略时,三种算法的检测精度均有提升; 步骤五:调优后,对目标检测框进行定位作业,定位完毕后,对目标检测框的内容进行快速分类,完成检测目标检测框定位通过:输入测试图像、利用selective search算法在图像中提取2000个左右的region proposal、将每个region proposal缩放(warp)成227x227的大小并输入到CNN,将CNN的fc7层的输出作为特征、将每个region proposal提取到的CNN特征输入到SVM进行分类定位。 综上:本发明本申请将针对目标检测算法中候选框的准确选择问题提出改进方案,主要包括个主要步骤,即候选框得分调优和候选框位置调优,这主要是因为当图像的某个位置的候选框越多时,这个位置就可能存在一个前景实例,且邻域候选框的得到较高时,当前候选框亦应该具有较高的分,基于这个想法,根据邻居候选框的数量和得分,重新平衡当前框的得分; 本专利申请提案要解决的问题是利用图像邻域内候选框信息,构建准确可靠的选择策略,提升高分辨率遥感图像中基建主体目标的定位与分类精度,进而服务于准确的施工进展评估任务,通过所提的候选框调优策略,能够有效提取出具有真实目标的检测框,缓解检测过程中出现对部分小尺度目标(例如桥墩、路基等)的漏检。 对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 基于目标锚框优选策略的交通基建施工目标监测系统与方法
- 用于图像目标检测处理的锚框生成方法及轻量级目标检测方法