一种机场行李智能全向输转平台控制系统
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及智能装备技术领域,具体的说,本发明涉及一种智能全向输转平台的控制系统,用于实现机场行李、物资等的智能转运。
背景技术
飞机出港前和进港后都需要进行旅客行李的转移运输,目前国内外的机场大多通过牵引式行李运输车,在停机位与航站楼行李分拣区之间进行行李转运。牵引式行李运输车由人工进行驾驶,一个行李牵引车最多可同时牵引10个车厢。这样在机场复杂的道路环境行驶时,容易发生碰撞、行李脱落等问题。在行李分拣区或停机位附近行驶时,道路狭窄且要求与行李装卸平台对接精准,对牵引车驾驶员的驾驶技术要求非常高。因此,急需要一种智能化的全向输转平台,来实现行李的自动化输送处理。
发明内容
为解决上述问题,提供一种机场行李智能全向输转平台控制系统。
本发明的目的是以下述方式实现的:
一种机场行李智能全向输转平台控制系统,包括输转平台,包括安装在输转平台上的上位机、定位导航模块、环境感知模块和运动执行模块;其中上位机设置在输转平台的车舱内部,所述上位机与定位导航模块、环境感知模块和运动执行模块通信连接,所述上位机包括数据融合模块,数据融合模块将避障让行模块采集的环境信息与定位导航模块采集的定位信息进行融合后,上位机对运动执行模块发送指令,控制车辆运行。
所述定位导航模块包括:
组合惯导装置,所述组合惯导装置内置惯性测量单元IMU和GNSS板卡;所述舱体前侧的上部安装门架,门架上安装有天线升降杆,GNSS天线安装在天线升降杆上,可以根据所载货物的高度进行GNSS天线的升降操作; GNSS天线与GNSS板卡连接,接收卫星信号并与GNSS网络基站进行差分得到经度、纬度;惯性测量单元IMU采集输转平台的姿态信息。
所述环境感知模块包括:
激光雷达,所述激光雷达包括安装在输转平台车的车舱舱体前侧门架上的多线激光雷达和安装在输转平台的四角的单线激光雷达,所述多线激光雷达用于前方远距离范围内的障碍物检测,所述单线激光雷达用于完成输转平台四周360度的障碍物检测;
毫米波雷达,布置在在输转平台四周侧面,用于检测近距离障碍物;
摄像头,布置在输转平台四周侧面,用于获取对接目标的图像信息发送至上位机,上位机得到对接目标与平台的相对姿态信息。
所述运动执行模块包括:
整车控制器,与上位机有线通信连接,接收上位机发送的运动指令;
电机驱动器组,与整车控制器连接,接收整车控制器发送的指令;
行走机构,与电机驱动器组连接,设置在输转平台机舱下部,包括至少四个舵轮组件,所述舵轮组件包括舵轮回转支承,舵轮回转支承安装在平台底部,所述舵轮回转支承下部安装有车轮,车轮连接舵轮行走电机,舵轮行走电机安装在平台底部;所述平台下部安装有舵轮转向电机,舵轮转向电机的输出轴通过齿轮啮合连接舵轮回转支承,所述电机驱动器组控制舵轮转向电机和舵轮行走电机动作并接收舵轮转向电机的内置编码器、舵轮行走电机的内置编码器的数据,计算出舵轮速度和偏转角的反馈值,并将其发送给整车控制器。
所述输转平台上还包括车身面板,所述车身面板与整车控制器通信连接,用户能够通过车身面板向整车控制器发送运动指令控制输转平台。
本发明的有益效果:本发明基于对输转平台的全向运动和智能行驶控制,实现了机场行李输转的信息化、智能化和无人化改进。通过多种定位导航技术手段相互融合的方式,实现了机场等半封闭区域内全天候、多区域的精准定位导航。输转平台自身具备的防碰撞、避障让行、行李锁紧和跌落检测等安全设计,极大的提高了行李运输途中的安全性和可靠性。
附图说明
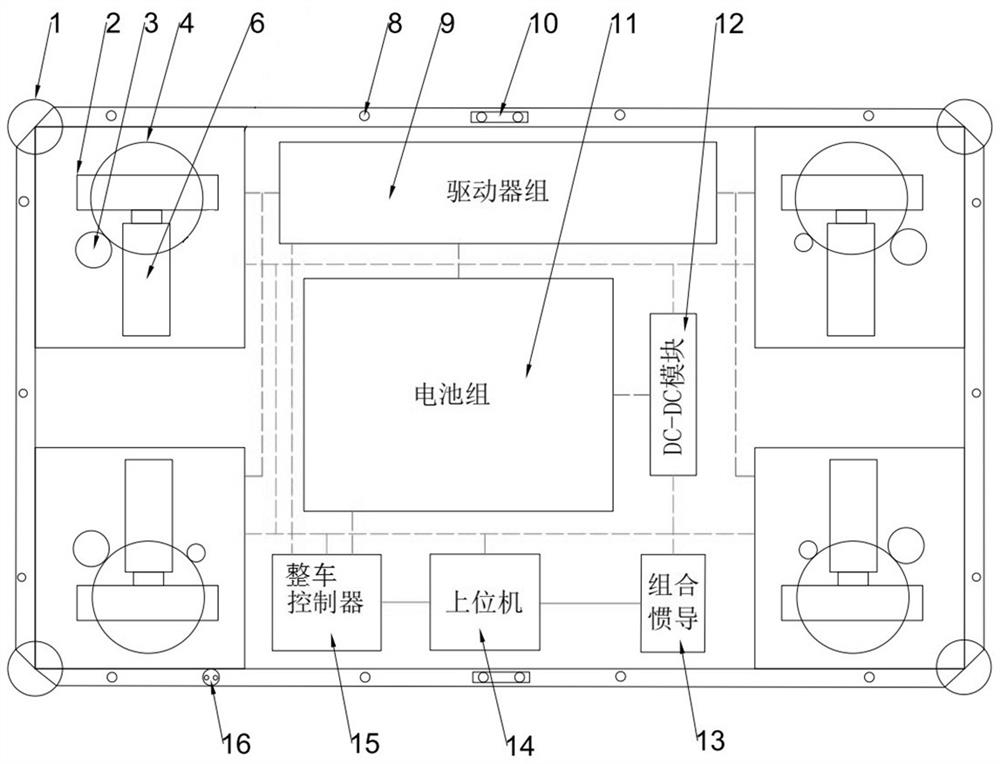
图1是本发明的实施例的系统布置俯视示意图;
图2是本发明的实施例的系统布置前视示意图;
图3是本发明的实施例的系统布置右视示意图;
图4是本发明的控制系统模块组成图;
图5是本发明的实施例的工作流程图。
其中,1.单线激光雷达,2.车轮,3.舵轮转向电机,4.舵轮回转支承, 6.舵轮行走电机, 8.毫米波雷达,9.电机驱动器组,10.摄像机,11.电池组,12.DC-DC电源模块,13.组合惯导装置,14.上位机,15.整车控制器,16.充电口,17.舵轮组件;
21.GNSS天线,22.钥匙开关,23.车身面板,24.急停按钮,25.多线激光雷达,26.车灯。
具体实施方式
下面结合附图和具体实施方式对本发明作进一步详细的说明。
应该指出,以下详细说明都是例式性的,旨在对本申请提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员通常理解的技术含义相同。
如图所示,本发明提供一种机场行李智能全向输转平台控制系统,系统包括定位导航、智能行驶、运动执行、避障让行、精准对接等模块。
定位导航模块包括布置在平台机舱内的组合惯导装置13,安装在前侧门架天线升降杆18上的GNSS天线21、多线激光雷达25,布置在平台四角的单线激光雷达1,以及安装在平台四边的摄像机10。其中,组合惯导装置13内置高精惯导IMU和GNSS板卡,并与运动执行模块中的整车控制器15进行通讯得到4个舵轮的行驶速度和偏转角度,行驶速度和偏转角度是通过轮速计获得,轮速计包括安装在舵轮行走电机6中的内置编码器和舵轮转向电机3中的内置编码器获得。GNSS板卡通过天线21接收卫星信号并与网络基站进行差分得到经度、纬度和航向等信息,IMU与轮速计进行组合实现航迹推算。多线激光雷达25和单线激光雷达1用来感知平台四周环境,在卫星信号不可用的区域,建立高精地图进行定位导航。摄像机10可以识别车道线、物体形态和距离等信息,用来进行精准对接的定位导航。
本发明的控制系统可以根据工作环境的不同自适应的切换定位导航模式。上位机的数据融合模块分别接收环境感知模块和定位导航模块采集的数据;
根据定位导航模块接收的卫星信号,对输转平台所在的区域进行判断,根据区域判断组合导航模式;具体如下:
当输转平台在卫星信号良好或小范围遮挡区域,将组合惯导装置中的差分GNSS数据、IMU惯性测量单元数据和轮速计数据进行数据融合,则融合的输出结果为:输转平台的经度、纬度和航向信息。
当输转平台在卫星信号大范围遮挡区域,将摄像机的图像信息和激光雷达的点云数据进行SLAM处理后与IMU惯性测量单元数据、轮速计数据进行融合,则融合的输出结果为:输转平台的经度、纬度和航向信息
在需要精准对接的接驳区域,将摄像机的图像信息、激光雷达数据进行数据融合,则融合的输出结果为:输转平台与对接目标的相对位置与姿态信息。
根据定位导航模块接收的卫星信号,对输转平台所在区域进行判断,具体为:当所接受到的可用卫星数K≥4时,判断为卫星信号良好区域;当所接受到的可用卫星数K<4,且持续里程L≤1Km时,判断为卫星信号小范围遮挡区域;当所接受到的可用卫星数K<4,且持续里程L>1Km时,判断为卫星信号大范围遮挡区域。
精准对接的接驳区域为设定好的固定工作位置,通过预先设定的位置坐标来进行判断。
进一步作为本发明技术方案的改进,本发明的定位导航系统包括三种组合导航模式:
(1)在卫星信号良好或小范围遮挡的区域,采用以“差分GNSS+IMU+轮速计”的组合导航模式;
(2)在卫星信号大范围遮挡的区域,采用“SLAM+IMU+轮速计”的组合导航模式,由图像感知模块根据事先构建的地图与当前感知的点云或图像数据进行匹配,确定车辆位置相对起始点的平面坐标,提供给组合导航系统完成数据融合;
(3)在需要精准对接的接驳区域,采用“激光+视觉”的组合导航模式,精准获得对接目标与平台的相对姿态信息。
智能行驶模块的功能主要由布置在机舱内的上位机14完成。上位机14与整车控制器15和组合导航主机13进行有线通信,同时与调度后台进行无线通信。上位机14接收后台或车身面板23的任务指令,根据组合惯导装置13提供的经度、纬度和航向定位导航信息以及运动执行模块反馈的平台实时速度和转角,与当前平台运动的目标位置进行对比解算得平台下一时刻的运动指令,包括速度和偏转角等信息,并发送给整车控制器15。
运动执行模块包括布置在机舱内整车控制器15和电机驱动器组9,以及分布在平台四角的舵轮组件17。舵轮组件17,主要由车轮2、舵轮转向电机3、舵轮回转支承4、舵轮行走电机6和外置编码器7等部件构成。整车控制器15与上位机14、电池组11、电机驱动器组9、舵轮组件17以及车身面板23之间可以进行通信。整车控制器15接收上位机14或车身面板23的运动指令,根据平台的运动学方程,将得到的平台速度和偏转角分解为各个舵轮组件17的速度和偏转角指令,并将其发送给电机驱动器组9。电机驱动器组9根据收到的指令信息,控制相应的舵轮转向电机3和行走电机舵轮行走电机6动作。同时,电机驱动器组9接收舵轮行走电机6的内置编码器和外置编码器7的数据,计算出舵轮速度和偏转角的反馈值,并将其发送给整车控制器15。整车控制器15根据电机驱动器组9反馈的4个舵轮速度和偏转角,进行闭环控制,同时根据运动学方程解算出平台实时的速度和偏转角,并发送给上位机14。
避障让行模块主要多线激光雷达25、单线激光雷达1和毫米波雷达8组成。多线激光雷达25布置在前侧较高位置,可以确保前方远距离范围内的障碍物检测。单线激光雷达1布置在平台四角,可以完成平台四周360°的障碍物检测。毫米波雷达8布置在平台四周,可检测近距离障碍物。以上3种传感器将检测数据发送给上位机14,上位机14从中得到不同方位和距离范围内的障碍物与平台之间的相对速度、相对距离、角度、运动方向等物理环境信息,结合调度后台下达或通过车身面板设定的当前行走路径,制定出合理的避障让行策略。
精准对接模块主要由布置在平台四周的摄像机10来实现。当平台运行到对接目标附近时,对接侧边的摄像机捕捉到对接目标的特征,并将其发送给上位机14。上位机14得到对接目标与平台的相对姿态信息,解算出平台动作指令,控制平台与目标完成对接。
该输转平台的控制系统工作流程如下:
a.智能全向输转平台上电,控制系统进行平台自身状态检查,主要包括电量、传感器信号等是否正常。若正常则进入下一步,否则将故障信息上报给后台综合管理系统,等待故障排除;
b.进行定位导航系统校准,主要是组合惯导的对准,并对断电前记录的位置信息进行校对;
c.进入休眠状态,等待人工或调度系统召唤;
d.收到人工或调度系统任务指令,进入任务执行模式;
e.上位机根据任务内容规划出平台的行走路径,并在行进过程中结合避障模块输出的障碍物信息实时调整路径,同时将平台的行进速度和方向指令发送给整车控制器,;
f. 整车控制器根据上位机指令,控制舵轮动作,完成平台的行走动作;
g.到达任务执行点附近,启动精准对接模块,精准对接模块通过摄像机捕获对接目标与输转平台的相对位置与姿态信息,并发送给上位机;
h. 上位机输出平台运行指令完成与目标物的精准对接;
i.重复上述流程,控制输转平台自主运行到下一目标点,直至全任务流程执行完毕;
j.根据后台或人工指令,执行下一任务,或进入休眠状态继续等待任务。
本发明基于对输转平台的全向运动和智能行驶控制,实现了机场行李输转的信息化、智能化和无人化改进。通过多种定位导航技术手段相互融合的方式,实现了机场等半封闭区域内全天候、多区域的精准定位导航。在后台调度控制模式下,输转平台整个执行任务的过程中无需工作人员参与,极大的减少了工作人员数量和劳动强度。而且,输转平台调速范围宽,在后台统一调度下多个平台同时运转,可提高行李输转效率。同时,输转平台自身具备的防碰撞、避障让行、行李锁紧和跌落检测等安全设计,极大的提高了行李运输途中的安全性和可靠性。
以上所述仅为本申请的优选实施例而已,并不用于限制本申请,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
- 一种机场行李智能全向输转平台控制系统
- 一种机场行李智能全向输转平台定位导航系统和方法