一种食品加工机
文献发布时间:2023-06-19 12:19:35
技术领域
本文涉及烹饪设备控制技术,尤指一种食品加工机。
背景技术
目前自清洗食品加工机(如自清洗豆浆机)制作过程包括:用户将水放入水箱,制作开始后水泵将水抽入水箱进行制浆。由于用户可能存在少加水的情况,制浆过程中需对水箱中有无水进行检测,缺水后及时提醒用户加水。目前的检测方式主要包括:1、在水箱中增加水位电极;2、检测管道流量计信号的有无;3、检测水泵的电流值大小等,对水箱中有无水进行判断,前者需要额外在水箱中安装电极,后者成本较高且响应较慢。
发明内容
本申请提供了一种食品加工机,能够利用水泵抽水和空抽时的转速差异对水箱缺水进行检测,检测快速,且无需增加额外器件。
本申请提供了一种食品加工机,可以包括水箱、水泵、杯体、转速检测单元和主控单元;所述水箱与所述杯体相连,所述水箱出水口处设置有所述水泵,所述转速检测单元与所述水泵相连,所述主控单元与所述转速检测单元相连;
在所述水泵向所述杯体内泵水期间,所述转速检测单元检测所述水泵的转速;
所述主控单元采集所述转速,并将所述转速与预设的转速阈值相比较;
当所述主控单元比较出所述转速小于所述转速阈值时,判定所述水箱缺水;当所述主控单元比较出所述转速大于或等于所述转速阈值时,判定所述水箱有水。
在本申请的示例性实施例中,所述转速检测单元可以包括:红外收发一体管;
所述水泵可以包括:水泵外壳、泵水电机和电机轴;所述电机轴上设置有不透光的挡片,所述挡片能够随所述电机轴的转动而转动;
所述红外收发一体管设置于所述水泵外壳上,并且所述挡片转动过程中能够经过所述红外收发一体管的红外发射端和红外接收端之间。
在本申请的示例性实施例中,在所述挡片转动过程中,当所述挡片位于所述红外收发一体管的红外发射端和红外接收端之间时,所述红外收发一体管发出第一信号;当所述挡片未位于所述红外收发一体管的红外发射端和红外接收端之间时,所述红外收发一体管发出第二信号,以在所述挡片转动过程中输出连续的波形信号;
所述主控单元根据采集到的所述波形信号的个数统计所述水泵的转速。
在本申请的示例性实施例中,所述转速检测单元可以包括:检测线路板和设置于所述检测电路板上的霍尔元件;
所述水泵包括:泵水电机和电机轴;所述电机轴上设置有磁性元件,所述磁性元件能够随所述电机轴的转动而转动;
所述磁性元件转动过程中能够接近所述霍尔元件,从而使得所述霍尔元件的输出信号发生变化。
在本申请的示例性实施例中,在所述磁性元件转动过程中,当所述磁性元件接近所述霍尔元件时,所述霍尔元件发出第三信号,当所述磁性元件接近所述霍尔元件时,所述霍尔元件发出第四信号,以在所述磁性元件转动过程中输出连续的波形信号;
所述主控单元根据采集到的所述波形信号的个数统计所述水泵的转速。
在本申请的示例性实施例中,所述水泵可以为隔膜泵;
所述转速检测单元检测所述隔膜泵的转动圈数;
所述主控单元根据所述转动圈数计算所述隔膜泵的转速,并根据所述转动圈数和所述隔膜泵转动一圈的进水量计算所述隔膜泵的当前进水总量。
在本申请的示例性实施例中,所述主控单元可以根据检测出的多个波形信号的总周期判断所述水箱是否无水;所述波形信号包括:方波信号。
在本申请的示例性实施例中,所述主控单元在预设时长内对所述波形信号的脉冲数量进行检测,当检测出的脉冲数量小于预设的数量阈值时,判定所述红外收发一体管和/或所述挡片故障。
在本申请的示例性实施例中,所述主控单元在判定所述水箱缺水后,根据所述水泵当前的已工作时长控制水泵的后续工作方式。
在本申请的示例性实施例中,所述主控单元根据所述水泵当前的已工作时长控制水泵的后续工作方式可以包括:
当所述已工作时长小于预设的第一时长阈值时,控制所述水泵继续工作;
当所述已工作时长大于或等于所述第一时长阈值,小于所述第二时长阈值时,控制所述水泵继续工作第一时长后,停止工作第二时长;
当所述已工作时长大于或等于所述第二时长阈值时,控制所述水泵停止工作。
与相关技术相比,本申请的食品加工机包括水箱、水泵、杯体、转速检测单元和主控单元;所述水箱与所述杯体相连,所述水箱出水口处设置有所述水泵,所述转速检测单元与所述水泵相连,所述主控单元与所述转速检测单元相连;在所述水泵向所述杯体内泵水期间,所述转速检测单元检测所述水泵的转速;所述主控单元采集所述转速,并将所述转速与预设的转速阈值相比较;当所述主控单元比较出所述转速小于所述转速阈值时,判定所述水箱缺水;当所述主控单元比较出所述转速大于或等于所述转速阈值时,判定所述水箱有水。通过该实施例方案,能够利用水泵抽水和空抽时的转速差异对水箱缺水进行检测,检测快速,且无需增加额外器件。
本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
附图说明
附图用来提供对本申请技术方案的理解,并且构成说明书的一部分,与本申请的实施例一起用于解释本申请的技术方案,并不构成对本申请技术方案的限制。
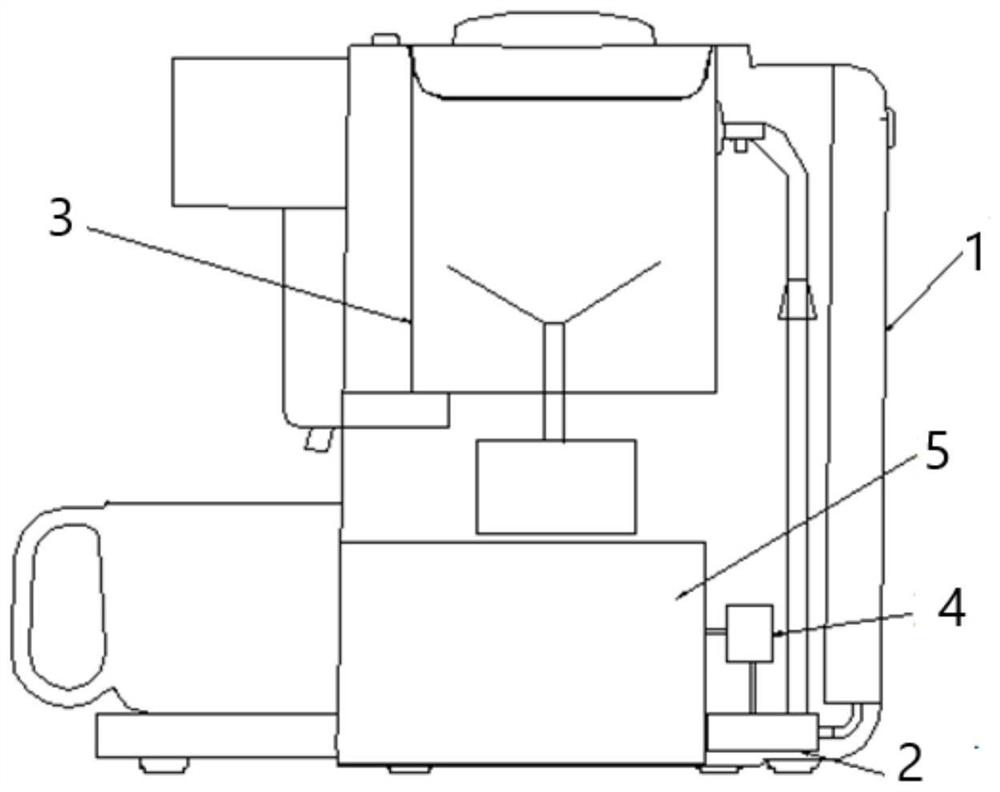
图1为本申请实施例的食品加工机结构示意图;
图2为本申请实施例的红外收发一体管设置示意图;
图3为本申请实施例的霍尔元件设置示意图;
图4为本申请实施例的有水无水方波波形示意图;
图5为本申请实施例的缺水与有水状态检测通过连续多次判断的方法示意图。
具体实施方式
本申请描述了多个实施例,但是该描述是示例性的,而不是限制性的,并且对于本领域的普通技术人员来说显而易见的是,在本申请所描述的实施例包含的范围内可以有更多的实施例和实现方案。尽管在附图中示出了许多可能的特征组合,并在具体实施方式中进行了讨论,但是所公开的特征的许多其它组合方式也是可能的。除非特意加以限制的情况以外,任何实施例的任何特征或元件可以与任何其它实施例中的任何其他特征或元件结合使用,或可以替代任何其它实施例中的任何其他特征或元件。
本申请包括并设想了与本领域普通技术人员已知的特征和元件的组合。本申请已经公开的实施例、特征和元件也可以与任何常规特征或元件组合,以形成由权利要求限定的独特的发明方案。任何实施例的任何特征或元件也可以与来自其它发明方案的特征或元件组合,以形成另一个由权利要求限定的独特的发明方案。因此,应当理解,在本申请中示出和/或讨论的任何特征可以单独地或以任何适当的组合来实现。因此,除了根据所附权利要求及其等同替换所做的限制以外,实施例不受其它限制。此外,可以在所附权利要求的保护范围内进行各种修改和改变。
此外,在描述具有代表性的实施例时,说明书可能已经将方法和/或过程呈现为特定的步骤序列。然而,在该方法或过程不依赖于本文所述步骤的特定顺序的程度上,该方法或过程不应限于所述的特定顺序的步骤。如本领域普通技术人员将理解的,其它的步骤顺序也是可能的。因此,说明书中阐述的步骤的特定顺序不应被解释为对权利要求的限制。此外,针对该方法和/或过程的权利要求不应限于按照所写顺序执行它们的步骤,本领域技术人员可以容易地理解,这些顺序可以变化,并且仍然保持在本申请实施例的精神和范围内。
实施例一
本申请提供了一种食品加工机,如图1所示,可以包括水箱1、水泵2、杯体3、转速检测单元4和主控单元5;所述水箱1与所述杯体3相连,所述水箱1出水口处设置有所述水泵2,所述转速检测单元4与所述水泵2相连,所述主控单元5与所述转速检测单元4相连;
在所述水泵2向所述杯体3内泵水期间,所述转速检测单元4检测所述水泵2的转速;
所述主控单元5采集所述转速,并将所述转速与预设的转速阈值相比较;
当所述主控单元5比较出所述转速小于所述转速阈值时,判定所述水箱1缺水;当所述主控单元5比较出所述转速大于或等于所述转速阈值时,判定所述水箱1有水。
在本申请的示例性实施例中,实现了通过检测水泵2的转速识别水箱1的无水状态。
在本申请的示例性实施例中,食品加工机工作时,主控单元5可以驱动水泵2工作进行泵水,同时转速检测单元4对水泵2的转速进行检测,转化为电信号传输给主控单元5(MCU)。由于有水时水泵2负载大,转速慢,无水时水泵2为空载转速快,MCU通过识别到转速n小于一定值(转速阈值)时,即可判断水箱缺水情况。
在本申请的示例性实施例中,通过有水和无水的转速差异,可快速识别水箱1有无水,可靠性高。
实施例二
该实施例在实施例一的基础上,给出了采用红外收发一体管对水泵转速进行检测的实施例。
在本申请的示例性实施例中,如图2所示,所述转速检测单元4可以包括:红外收发一体管41和挡片42;
所述水泵2可以包括:水泵外壳21、泵水电机22和电机轴23;所述电机轴23上设置有不透光的挡片42,所述挡片42能够随所述电机轴23的转动而转动;
所述红外收发一体管41设置于所述水泵外壳21上,并且所述挡片42转动过程中能够经过所述红外收发一体管41的红外发射端41-1和红外接收端41-2之间。
在本申请的示例性实施例中,在所述挡片42转动过程中,当所述挡片42位于所述红外收发一体管41的红外发射端41-1和红外接收端41-2之间时,所述红外收发一体管41发出第一信号;当所述挡片42未位于所述红外收发一体管41的红外发射端41-1和红外接收端41-2之间时,所述红外收发一体管41发出第二信号,以在所述挡片42转动过程中输出连续的波形信号;所述波形信号可以包括:方波信号;
所述主控单元5根据采集到的所述波形信号的个数统计所述水泵2的转速。
在本申请的示例性实施例中,在水泵2的电机轴23上可以安装一黑色挡片,水泵2工作时,挡片42转动,当挡片42穿过红外收发一体管41中间时,红外光被挡片42挡住,红外收发一体管41的输出电平发生变化,从而输出稳定的方波信号。MCU可以通过对方波信号的计数,即可得到水泵2的转动圈数。
在本申请的示例性实施例中,通过红外对管将转速信号转化为稳定的方波电信号,信号输出可靠、稳定,检测准确性高。
实施例三
该实施例在实施例一的基础上,给出了采用霍尔信号对水泵转速进行测量的实施例。
在本申请的示例性实施例中,如图3所示,所述转速检测单元4可以包括:检测线路板43、设置于所述检测电路板43上的霍尔元件44以及磁性元件45(如磁铁);
所述水泵2可以包括:水泵外壳21、泵水电机22和电机轴23;所述电机轴23上设置有磁性元件45,所述磁性元件45能够随所述电机轴23的转动而转动;
检测线路板43可以设置于所述水泵外壳21上,所述磁性元件45转动过程中能够接近所述霍尔元件44,从而使得所述霍尔元件44的输出信号发生变化。
在本申请的示例性实施例中,在所述磁性元件45转动过程中,当所述磁性元件45接近所述霍尔元件44时,所述霍尔元件44发出第三信号,当所述磁性元件45接近所述霍尔元件44时,所述霍尔元件44发出第四信号,以在所述磁性元件45转动过程中输出连续的波形信号;所述波形信号包括方波信号;
所述主控单元5根据采集到的所述波形信号的个数统计所述水泵2的转速。
在本申请的示例性实施例中,可以在水泵2的上部安装有一检测线路板43,线路板43上可以设有霍尔元件44,同时在电机轴23外露部分可以装有一带磁铁的机构。当水泵2工作时,电机轴23带动磁铁旋转,当磁铁转动至霍尔元件44上方时,霍尔元件44的输出信号(如电平信号)发生变化,从而输出稳定的方波信号。
在本申请的示例性实施例中,通过霍尔元件可以将转速信号转化为稳定的方波电信号,且转速检测单元4均在水泵2外部,受水泵2干扰小。
实施例四
该实施例在实施例一的基础上,给出了通过转动圈数对进水量进行控制的实施例。
在本申请的示例性实施例中,所述水泵2可以为隔膜泵;
所述转速检测单元4检测所述隔膜泵的转动圈数;
所述主控单元5根据所述转动圈数计算所述隔膜泵的转速,并根据所述转动圈数和所述隔膜泵转动一圈的进水量计算所述隔膜泵的当前进水总量。
在本申请的示例性实施例中,由于隔膜泵的隔膜腔结构一致性较好,所以隔膜泵转动一圈所能达到的进水量是一定的,批量差异性相对与电机的转速小。通过对水泵圈数的记录,即可实现对进水量的控制。例如,需进水量为L时,其所需的转动圈数N=L/b,b为水泵转动一圈的进水量。MCU识别到转动圈数为N时停止水泵工作,即向粉碎杯(即杯体)中泵入的水量为L。
在本申请的示例性实施例中,通过检测转速这单一变量可在检测无水的同时对进水量进行控制,MCU只需使用一个端口即可,占用资源少。
实施例五
该实施例在实施例二或三的基础上,给出了检测多个方波信号的总周期判断是否无水的实施例。
在本申请的示例性实施例中,所述主控单元可以根据检测出的多个波形信号的总周期判断所述水箱是否无水;所述波形信号包括:方波信号。
在本申请的示例性实施例中,如图4所示,当水泵2的转速为N1时,水泵2抽水时,其产生的方波信号为T1=1/2N1,空抽时电机转速为N2,其产生的方波信号T2=1/2N2,由于N2>N1,故,T2 在本申请的示例性实施例中,通过对多个脉宽的时间总和进行判断,提高了检测准确度,避免误判。 实施例六 该实施例在实施例二的基础上,给出了对一定时间的方波数量进行采集,判断红外收发一体管和/或挡片是否故障的实施例。 在本申请的示例性实施例中,所述主控单元5在预设时长内对所述波形信号的脉冲数量进行检测,当检测出的脉冲数量小于预设的数量阈值时,判定所述红外收发一体管41和/或所述挡片42故障。 在本申请的示例性实施例中,MCU可以对1s内的脉冲数量进行采集,当检测到1s内脉冲数n 在本申请的示例性实施例中,当红外模块故障或挡片出现异常时,会造成输出口波形减少或无波形输出,此时进水控制及水量检测无法继续进行,通过对每秒脉冲数的检测可识别此类异常。 在本申请的示例性实施例中,可以连续检测多次或一定时长,例如5s,再进行报警处理,避免突发性异物或干扰的影响,判断可靠性更高。 实施例七 该实施例在上述任意实施例的基础上,给出了缺水后水泵工作方式随时间控制的实施例。 在本申请的示例性实施例中,所述主控单元在判定所述水箱缺水后,根据所述水泵当前的已工作时长控制水泵的后续工作方式。 在本申请的示例性实施例中,所述主控单元根据所述水泵当前的已工作时长控制水泵的后续工作方式可以包括: 当所述已工作时长小于预设的第一时长阈值时,控制所述水泵继续工作; 当所述已工作时长大于或等于所述第一时长阈值,小于所述第二时长阈值时,控制所述水泵继续工作第一时长后,停止工作第二时长; 当所述已工作时长大于或等于所述第二时长阈值时,控制所述水泵停止工作。 在本申请的示例性实施例中,目前方案水箱无水的检测及用户加水后的恢复都需要水泵2工作才能进行。而缺水主要有两种情况1.用户未加水启动功能;2.制浆过程中水量不够。情况1需要快速检测与恢复,情况二从报警到用户加水的时间可能比较长,水泵2一直工作会导致水泵电机温升较高。本实施例方案可以设定缺水后水泵工作方式如下:30s内水泵一直工作,30s后水泵工作5s停5s,30分钟后水泵不再继续工作进行异常报警。 在本申请的示例性实施例中,用户看到缺水提示后及时向水箱1中加水,水泵2一直工作能马上检测到有水从而恢复制作过程。当该异常未及时处理时,可以通过水泵2的间隔工作减少水泵2的工作时长,提高水泵2的寿命。30分钟后不再继续制浆,避免了浆液(如豆浆)冷却后再次加热引起溢浆的问题。 实施例八 该实施例在上述任意实施例的基础上,给出了缺水与有水状态检测通过连续多次判断提高准确性的实施例。 在本申请的示例性实施例中,如图5所示,例如,检测到100个脉冲宽度小于阈值T,且连续3个检测周期均小于T时,可以判断为水箱缺水状态。当连续3个检测周期脉宽大于或等于阈值T时,确认此时有水。由于负载时水泵转速约为0.7N,N为水泵空载转速;计算可得空载时,100个方波宽度为T1=100/2N,负载时100个方波宽度为T2=100/1.4N,为可靠检测,本实施例方案可以设置阈值T=100/1.7N,本实施例方案所用水泵空载转速可以为250r/s,即阈值为235ms。 在本申请的示例性实施例中,通过多次检测滤除有水到无水之间的不稳定状态,提高了可靠性。 在本申请的示例性实施例中,有无水检测时长为700ms左右,缺水报警及加水恢复速度快,用户体验好。 本领域普通技术人员可以理解,上文中所公开方法中的全部或某些步骤、系统、装置中的功能模块/单元可以被实施为软件、固件、硬件及其适当的组合。在硬件实施方式中,在以上描述中提及的功能模块/单元之间的划分不一定对应于物理组件的划分;例如,一个物理组件可以具有多个功能,或者一个功能或步骤可以由若干物理组件合作执行。某些组件或所有组件可以被实施为由处理器,如数字信号处理器或微处理器执行的软件,或者被实施为硬件,或者被实施为集成电路,如专用集成电路。这样的软件可以分布在计算机可读介质上,计算机可读介质可以包括计算机存储介质(或非暂时性介质)和通信介质(或暂时性介质)。如本领域普通技术人员公知的,术语计算机存储介质包括在用于存储信息(诸如计算机可读指令、数据结构、程序模块或其他数据)的任何方法或技术中实施的易失性和非易失性、可移除和不可移除介质。计算机存储介质包括但不限于RAM、ROM、EEPROM、闪存或其他存储器技术、CD-ROM、数字多功能盘(DVD)或其他光盘存储、磁盒、磁带、磁盘存储或其他磁存储装置、或者可以用于存储期望的信息并且可以被计算机访问的任何其他的介质。此外,本领域普通技术人员公知的是,通信介质通常包含计算机可读指令、数据结构、程序模块或者诸如载波或其他传输机制之类的调制数据信号中的其他数据,并且可包括任何信息递送介质。
- 一种双层食品加工机上盖、食品加工机机头和食品加工机
- 一种食品加工机的食品加工方法及食品加工机