用于旋转工件的装置
文献发布时间:2023-06-19 12:19:35
技术领域
本发明涉及一种用于旋转以增材制造方法构建的工件(特别是牙科工件)的装置,特别是用于从用于构建工件的至少一些多余的可光硬化材料清洁工件的装置。
背景技术
在多种技术领域中,越来越多地通过增材制造方法(本文中还被称为3D打印)来制造物理工件或机械工件。
此类增材制造方法通常允许以工件的期望的单独形状来构建工件,这通过随后添加材料以形成该形状来实现。通过移除材料来从超大坯料中加工出工件的所谓的减成方法越来越多地被增材制造方法所取代。
虽然增材制造方法在快速成型的行业中被同时广泛使用,但是在许多领域中的最终产品的制造仍然具有挑战性。特别是对于制作牙科修复物,一般需要使用与用于人体相容的材料。另外,由构建过程制造的牙科修复物必须满足对机械稳定性的要求以及对美学的期望,例如涉及色差和半透明度。
一些增材制造工艺基于立体光照型技术。立体光照型技术一般使用光来硬化可光硬化的或可光致聚合的树脂。基于计算机辅助设计和/或计算机辅助制造(CAD/CAM)的数据被用于在可光硬化树脂层上投影光图案。光敏树脂通常由于暴露于光而固化,使得形成根据图案的固化树脂层。通过连续添加层来形成期望的三维工件。由此,根据三维工件的期望外部形状来控制图案。
通常,在工件与可光硬化材料之间的边界处,可光硬化材料中的一些可光硬化材料在构建工件之后驻留在工件上。可光硬化材料通常以不同的量驻留在工件上,这取决于例如可光硬化材料的粘度。这种过剩或多余材料通常是不期望的,因为它在工件的实际形状上形成了附加的结构,并且因为可光硬化材料通常是粘性的、可包含不期望的单体以及/或者可能(因此)无法形成耐用的结构。因此,目前通常对此类残留的可光硬化材料进行后固化,以提供具有固体表面的工件。根据另一种方法,对工件进行机械清洁或借助于化学溶液来清洁,并且之后任选地后固化。
虽然用于清洁通过增材制造制成的工件的现有方法提供了有用的结果,但仍然需要有效地清洁此类工件,同时在清洁期间对工件的损坏或影响应被最小化。溶液有利地应该能够用于多种不同的增材制造方法,这些方法基于用于构建工件的不同化学材料来操作。
EP 2 216 105 B1(Peugeot)描述了一种用于通过对机加工部件进行离心来设定运动来清洁和干燥机加工部件的方法,其中离心包括机加工部件围绕相对于彼此倾斜的至少两条转动轴线的转动。
DE 10 2015 120 211 A1(Zippel)涉及用于工业上待清洁的工件或机器部件的可移动保持装置,该可移动保持装置包括至少一个第一驱动单元,该至少一个第一驱动单元具有水平延伸的第一驱动轴,该第一驱动轴能够借助第一驱动单元围绕枢转轴线驱动;第二驱动单元,该第二驱动单元布置在具有第二驱动轴的第一驱动轴单元上,该第二驱动轴能够借助第二驱动单元围绕垂直于转动轴线延伸的枢转轴线的第一驱动单元驱动;以及工件载体单元,该工件载体单元具有用于保持接纳待清洁的工件或机器部件的工件载体。
发明内容
本发明涉及一种用于旋转工件的装置。此类工件优选地为通过增材制造制成的类型(在本文中也进一步称为“3D打印工件”,其中通过立体光照型技术或数字光处理的制造有时是优选的)。该装置包括用于围绕旋转轴线旋转的转子。此外,该装置可包括用于保持工件的容置座。该容置座枢转地连接到转子,以用于围绕横向于(或垂直于)旋转轴线的回转轴线回转,使得容置座能够在相对于旋转轴线的第一角取向和相对于旋转轴线的不同的第二角取向之间回转。该装置还包括相对于容置座可以可移动方式布置的平衡配重物。该平衡配重物能够相对于容置座锁定在不同距离处。
在一个实施方案中,该装置包括工件,并且容置座是任选的。工件可以枢转地连接到转子,以用于围绕横向于(或垂直于)旋转轴线的回转轴线回转,使得工件能够在相对于旋转轴线的第一角取向和相对于旋转轴线的不同的第二角取向之间回转。该装置还包括相对于工件可以可移动方式布置的平衡配重物。该平衡配重物能够相对于工件锁定在不同距离处。
平衡配重物的重量通常在20g至100g或30g至50g的范围内。
平衡配重物可相对于工件被锁定的距离在30mm至150mm的范围内。
本发明的有利之处在于,其使得工件能够以至少两个不同的确定角取向旋转。与其中角取向由离心机的几何形状和转速产生的常规离心机相比,本发明的装置允许独立于转速来控制两个或若干个不同角取向中的至少一者。本发明的有利之处还在于,其能够根据工件的形状有效地旋转工件。例如,工件旋转的角取向可已经在工件的设计阶段确定。本发明的有利之处还在于,其允许在旋转期间(例如在多余的可光硬化材料与工件分离时)使工件重新平衡,使得包含多余的可光硬化材料的工件的重量减小。本发明的有利之处还在于,其能够在不使用任何溶剂的情况下从工件移除多余材料。因此,工件的质量不受任何溶剂的影响。
在23℃和1s
转速通常在100转/分钟(r/min)至3,000r/min的范围内或在1,800r/min至3,000r/min的范围内。对于可光硬化材料的较高粘度,后一范围有时是优选的。
在一个实施方案中,该装置包括工件(例如,接纳在容置座上)。工件可具体地包括牙科工件。此类牙科工件可为牙科牙列模型,具体地为3D打印的阳模型或患者的牙列的复制品。患者的牙列的3D打印的阳模型可用作从牙科印模获得的石膏模型的替代物。此外,工件可以是牙科对准器。此类牙科对准器包括患者的牙齿的负形,并且可被成形用于使牙齿朝向期望位置移动。
在一个实施方案中,工件包括牙科修复物或多个牙科修复物,例如一个或多个牙冠、一个或多个牙桥、一个或多个牙科镶嵌物或任何这些的组合。牙冠或牙桥通常具有外表面和内表面。外表面通常对应于在患者的口中可见或可触及的表面(例如咬合面和侧面),而内表面通常形成用于接纳在牙残桩或牙基台上的腔。
工件通常在x和y方向上具有1cm至10cm的尺寸,并且在z方向上具有1cm至5cm的尺寸。工件的重量通常在0.1g至100g或0.2g至50g的范围内。
工件还可包括一个或多个支撑结构,该一个或多个支撑结构用于在构建(一个或多个)牙科修复物时支撑(一个或多个)牙科修复物。工件还可包括基础结构,通过该基础结构将(一个或多个)牙科修复物(最终经由(一个或多个)支撑结构)保持在容置座上。
在一个实施方案中,该装置可具有仅一个容置座和/或仅一个工件。因此有利于工件在旋转期间的重新平衡(例如,由于重量变化)。
在一个实施方案中,该装置包括致动驱动装置,该致动驱动装置用于通过计算机控制将平衡配重物定位在相对于容置座的不同距离处。致动驱动装置可包括马达和主轴,该主轴可由马达驱动。主轴可具有螺纹,该螺纹接合平衡配重物中的对应螺纹。马达可包括用于朝向期望位置控制马达的角位置的定位传感器。因此,通过朝向已知角位置转动马达,平衡配重物被移位到已知线性位置。这是因为主轴经由马达的转动以平衡配重物的对应比例的线性位移平移。应当注意,致动驱动装置不限于主轴驱动装置。技术人员将认识到基于例如电动线性驱动装置或气压缸或液压缸的另选的致动驱动装置。
在一个实施方案中,该装置还包括用于感测响应于转子旋转而发生的失衡的传感器。该传感器可基于加速度传感器。加速度传感器可被布置用于测量旋转轴线的至少一个或两个径向维度上的加速度。例如,传感器可机械地联接(例如固定)在装置或装置的部件处。在响应于转子旋转而发生任何失衡的情况下,装置(或其部件)可振动。装置的振动可由加速度传感器感测。
此外,传感器可基于力传感器。力传感器可被布置用于测量由转子在旋转轴线的至少一个或两个径向维度上施加在力传感器上的力。例如,力传感器可被布置用于感测施加在承载转子的轴承上的力。
在一个实施方案中,传感器可被配置为感测响应于在基于笛卡尔坐标系的两个或三个轴上旋转转子而发生的任何失衡。
在一个实施方案中,控制致动驱动装置,以用于基于传感器的输出来定位平衡配重物。例如,在感测到失衡(通过感测加速度或力)时,可控制致动驱动装置以使平衡配重物在第一方向上移位。在平衡配重物的位移期间和/或之后,优选地再次感测或继续感测任何失衡。在失衡增加的情况下,可控制致动驱动装置以使平衡配重物在相反的第二方向上移位。可控制致动驱动装置以使平衡配重物在第一方向和第二方向上移位,直到由传感器感测到的失衡达到最小。因此,该装置被配置为在旋转期间响应于从工件移除多余材料而重新平衡。
在一个实施方案中,该装置包括回转臂,该回转臂枢转地连接到转子,以用于围绕回转轴线回转。容置座因此优选地经由回转臂枢转地连接到转子。回转臂可具有沿纵向轴线延伸的细长形状。纵向轴线优选地垂直于回转轴线布置。回转臂优选地具有第一端部和第二端部,其中容置座被布置在第一端部处。
回转臂优选地具有在穿过第一端部和第二端部的维度上延伸的惯性轴。纵向轴线可对应于回转臂的惯性轴。
在一个实施方案中,基于存储工件的数据表示(或计算机模型)的计算机的信息,控制致动驱动装置,以用于定位平衡配重物。基于工件的计算机模型,可计算工件的惯性轴和/或工件的质心。基于工件的惯性轴,工件可被布置或构建在容置座上的某个位置处,使得工件的惯性轴与回转臂的纵向轴线一致。此外,工件的质心可用于调节平衡配重物,使得工件围绕旋转轴线的旋转期间的失衡在第二角取向上最小化。因此,该装置可被配置成使得工件的惯性轴和/或工件的质心可由装置(具体地由装置的控制单元)以数据的形式从计算机接收。
在一个实施方案中,该装置被构造为在至少第一角取向上锁定容置座以防止回转。具体地讲,可通过锁定回转臂以防止回转来锁定容置座以防止回转。因此,该装置可被构造为在至少第一角取向上选择性地锁定或解锁容置座(或回转臂)。当被锁定时,容置座(或回转臂)优选地被锁定以防止围绕回转轴线回转,而当解锁时,容置座(或回转臂)能够朝向第二角取向回转。因此,该装置可具有锁定机构,该锁定机构能够在第一角取向上将转子和回转臂彼此可释放地锁定。锁定机构可包括可移位销,该可移位销可被推动穿过转子中的第一孔和回转臂中的第二孔,以用于将转子和回转臂彼此锁定。为了释放,销可从第一孔和第二孔中的至少一者或两者回缩。销可由电可控致动器(例如螺线管致动器)移位。
在一个实施方案中,该装置具有用于控制装置的操作的控制单元。
该控制单元可电控制致动器,以用于在第一角取向上将转子和回转臂彼此锁定或者将转子和回转臂从彼此释放,以用于相对于彼此回转。因此,该装置通常可被构造为以第一操作模式和第二操作模式操作,在第一操作模式下,容置座处于第一角取向,在第二操作模式下,容置座处于第二角取向。在第一操作模式和第二操作模式两者中,工件围绕旋转轴线A旋转。然而,容置座(以及因此工件)的角取向在第一操作模式和第二操作模式中是不同的。优选地,容置座(以及因此工件)相对于旋转轴线的第一角取向和第二角取向在第一操作模式和第二操作模式之间相差90度(或基本上90度)。
在一个实施方案中,在第二角取向上,回转臂被取向成使得回转臂的惯性轴(或回转臂的纵向轴线)被布置成相对于旋转轴线以一定倾斜角倾斜。倾斜角可为90度(或基本上90度)。因此,在第一角取向上,旋转轴线和纵向轴线优选地彼此一致。换句话讲,在第一角取向上,回转臂被取向成使得回转臂的惯性轴被布置成与旋转轴线一致。在第二角取向上,旋转轴线和纵向轴线优选地相对于彼此倾斜90度(或基本上90度)(其中优选地旋转轴线和纵向轴线相交)。
回转臂的第一端部和第二端部优选地沿纵向轴线布置或布置在纵向轴线上。回转轴线优选地布置在距第二端部一定距离处。回转轴线还可与纵向轴线相交。容置座优选地具有用于接纳工件的接纳表面。回转轴线优选地布置在容置座的第二端部和接纳表面之间。接纳表面可以是平面的。接纳表面还可被布置成垂直于纵向轴线。接纳表面可适用于在其上构建工件。优选地,在容置座被安装到回转臂的情况下,容置座具有与回转臂的纵向轴线一致的惯性轴。因此,包括安装在其上的容置座的回转臂优选地可围绕纵向轴线转动,而不会由转动引起失衡。
在一个实施方案中,容置座能够可分离地安装或安装到回转臂上。另外,容置座能够可分离地安装到增材制造装置中,以用于由可光硬化材料分层构建工件。因此,容置座可选择性地安装在增材制造装置或旋转装置中。
平衡配重物优选地在回转臂内被线性地引导。优选地,平衡配重物沿回转臂的纵向轴线被线性地引导。平衡配重物能够可移位地安装在回转臂处以便在穿过第一端部和第二端部(或沿纵向轴线)的维度上线性移位。
在一个实施方案中,工件具有惯性轴,并且工件被安装到容置座,使得工件的惯性轴与回转臂的惯性轴一致。工件可因此被安装到容置座,使得工件的惯性轴与回转臂的纵向轴线一致。
在一个实施方案中,平衡配重物和工件布置在回转轴线的相对侧上。因此,平衡配重物被布置用于补偿将以其他方式引起围绕回转轴线的扭矩的工件的重量。此外,在第二角转动中,平衡配重物和工件优选地另外布置在旋转轴线的相对侧上。因此,平衡配重物被布置用于补偿在围绕旋转轴线旋转期间由工件引起的离心力。如果不补偿,那么此类离心力将以某种方式在围绕旋转轴线旋转工件期间引起失衡。
在一个实施方案中,该装置还包括真空室。该真空室可由收集容器和用于以可打开方式封闭(或密封)收集容器的封闭件形成。工件可布置在收集容器内,以用于旋转。
在一个实施方案中,该装置包括用于驱动转子的旋转驱动装置。该旋转驱动装置优选地被配置为以可变转速操作。具体地讲,旋转驱动装置可优选地通过控制控制单元以选自转速范围的特定转速操作。
在一个实施方案中,转子延伸穿过真空室的封闭件。因此,密封件可布置在封闭件内,以用于与转子的表面可滑动地密封。在该实施方案中,旋转驱动装置布置在真空室的外部。
在另选的实施方案中,转子和旋转驱动装置布置在真空室内。因此,滑动密封件可不是必需的。
本文所述的装置具体地用于清洁已通过增材制造方法产生或获得的工件,该增材制造方法包括可光硬化材料的逐层光固化(例如,使用立体光照方法)。
因此,本发明还描述了用于清洁此类工件的方法,其中该方法包括以下步骤:
提供如本文所述的装置,
将工件(具体地在其表面上具有可光固化材料的牙科工件)放置或固定到容置座,该容置座相对于转子枢转地附接,
以一定转速旋转工件,从而导致可光固化材料从工件的表面移除。
附图说明
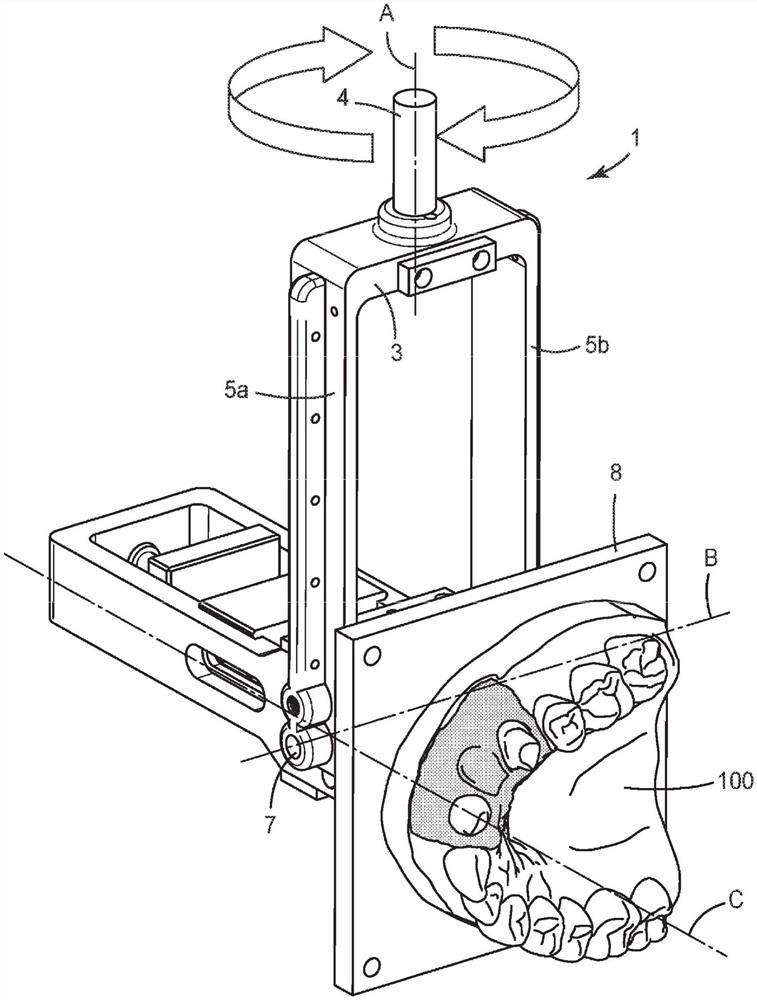
图1为根据本发明的实施方案的用于以第一角取向旋转工件的装置的透视图;
图2为根据本发明的实施方案的处于第二角取向的图1所示的装置的透视图;
图3为图2中所示的装置的不同的透视图;
图4为根据本发明的实施方案的包括工件的容置座的透视图;
图5为图4所示的包括工件的容置座的底视图;
图6、图7为根据本发明的实施方案的与收集容器组合的装置的剖视图;
图8、图9为根据本发明的实施方案的与另选的收集容器组合的装置的剖视图;并且
图10示出了根据本发明的实施方案的与另外的收集容器组合的容置座的透视图。
具体实施方式
图1示出了用于旋转工件100的装置1。具体地讲,工件100是3D打印的,具体地由多层光硬化材料构建。在构建工件的过程中,可光硬化(尚未硬化)材料用于形成特定厚度的各个层,该各个层随后在将下一层可光硬化材料添加到硬化层上之前各自硬化。为了使可光硬化材料的每个层硬化,将可光硬化材料的每个层暴露于光(例如,UV光),这引起相应层硬化。在构建工件100之后,可光硬化(尚未硬化)材料仍可粘附到工件100。此类粘附的可光硬化(尚未硬化)的材料–在本文中也称为“多余材料”–可至少部分地通过借助离心力将其旋转来移除。
在该示例中,工件100是复制患者的牙列的正牙科模型。此类牙科模型可以被牙科实验室用作石膏模型的替代物。在另一个示例中,牙科工件可为牙科修复物。牙科修复物可为牙冠或牙桥,或部分牙冠、牙科镶嵌物或一个或多个牙齿替换物。另外,牙科工件可包括多个牙科修复物。多个牙科修复物可作为一体打印(例如,以阵列或树的形式),并且之后可彼此分离。
装置1具有转子2。转子2可围绕旋转轴线A转动。回转臂3相对于转子2可转动地(或枢转地)悬挂。回转臂3围绕回转轴线B相对于转子2可转动地(或枢转地)悬挂。在该示例中,回转轴线B被布置成横向于(具体地垂直于)旋转轴线A。因此,回转臂3可围绕旋转轴线A以及垂直于旋转轴线A旋转。该示例中的转子2为叉形。具体地讲,转子2具有驱动轴4,两个支腿5a和5b从该驱动轴突出。驱动轴4沿旋转轴线A延伸,并且两个支腿5a、5b各自平行于并侧向偏离旋转轴线A延伸。支腿5a、5b中的每个支腿分别具有自由端部分6a、6b。回转臂3通过轮轴7悬挂在转子2处。轮轴7延伸穿过转子2的自由端部分6a、6b并穿过回转臂3,并且因此在转子2和回转臂3之间形成可转动的连杆。可转动的连杆还限定回转轴线B。另选地,两个轮轴中的每个轮轴可延伸穿过一个自由端部分6a/6b进入回转臂3的一侧,并且因此可在转子2和回转臂3之间形成可转动的连杆。技术人员将认识到包括悬挂到转子的回转臂的转子的进一步设计。因此,本发明不限于示例的设计。
转子2可被驱动用于围绕旋转轴线旋转。因此,转子2(特别是轴4)可联接到旋转驱动装置(未示出)。旋转驱动装置可优选地以各种转速控制,例如在至多3000转/分钟的范围内。该示例中的旋转驱动装置为伺服马达。
装置1还具有用于保持工件100的容置座8。该示例中的容置座8以平坦平台的形状设置,工件100可固定在该平坦平台上。然而,提供用于附接工件的适当接合部的其他形状也是可行的。容置座8相对于转子2枢转地附接(在该示例中经由回转臂3),以用于围绕回转轴线B回转。因此,容置座8可独立于围绕旋转轴线A的任何旋转围绕回转轴线B回转。回转臂3(以及因此容置座8)相对于转子2的回转能够在相对于旋转轴线A的第一角取向和相对于旋转轴线A的不同的第二角取向之间实现。回转臂3(以及因此容置座8)相对于转子2的回转可以其他方式被限制,例如在第一角取向和第二角取向之间限定的角度范围之外被禁用。第一角取向示于图1中,并且在本文中被定义为相对于旋转轴线A的0(零)度取向。在第一角取向下,旋转轴线A优选地与工件100的惯性轴一致。因此,工件100的惯性轴与旋转轴线之间的角度为0度。因此,在第一角取向下,工件100可围绕旋转轴线A旋转,而工件100不会在旋转期间引起失衡。此外,在该示例中,在第一角取向下,旋转轴线A延伸穿过工件100。这是因为工件100的惯性轴在CAD系统中的工件设计期间并且通过安装(或3D打印)工件100来确定,其中惯性轴与旋转轴线A一致地布置在容置座A上。CAD系统还可用于设计工件100上的接合部,该接合部可在一个独特的转动和侧向位置与容置座8的对应反向接合部配合。此类接合部可例如包括至少两个间隔开的销,该至少两个间隔开的销可被接纳在设置于容置座中的对应的间隔开且特定大小的孔中。因此,通过简单地将工件100和容置座8的接合部彼此配合,工件100可被安装成具有与旋转轴线A一致地布置的惯性轴。
回转臂3优选地能够锁定在第一角取向上。如果被锁定,则可防止回转臂3远离第一角取向回转。此外,如果回转臂3被解锁,则回转臂3优选地可从第一角取向自由地转动至第二角取向。因此,装置1可以第一操作模式操作,其中容置座8处于第一角取向,并且其中装置1(以及因此工件100)围绕旋转轴线A旋转。这优选地引起粘附到工件100的多余材料(具体地用于工件100的3D打印的多余非硬化可光硬化材料)通过离心力与工件100分离。在第一操作模式中,回转臂3优选地被锁定以防止朝向第二角取向回转。这是为了防止容置座8通过离心力朝向第二角取向自动回转。应当注意,虽然工件最初可围绕惯性轴旋转,但具有容置座8的回转臂3在实践中通常趋于朝向第二角取向偏转,使得在第一角取向上的锁定是有用的。
装置1还可以第二操作模式操作,其中容置座8处于第二角取向,并且其中工件100围绕旋转轴线A旋转。因此,虽然工件仍然围绕相同的旋转轴线A旋转,但是工件取向不同,使得在第一角取向和第二角取向上,可从工件移除多余材料的不同部分。图2中示出了第二角取向。第二角取向在本文中被定义为相对于旋转轴线A基本上90度(或90度)的取向。虽然第二角取向期望地为90度,但回转臂3通常呈现由离心力以及最终作用在工件上的重力产生的角取向。因此,术语“基本上90度”应涵盖与90度的轻微偏差。在第二角取向中,工件100的一侧(在示例中,牙列模型的咬合面侧)面向径向远离旋转轴线A的方向。因此,在该侧处粘附的任何多余材料由于在围绕旋转轴线A旋转期间作用于多余材料上的离心力而被推离工件100。在第一角取向上,工件100的相同侧(在该示例中,牙列模型的咬合面侧)面向沿着或轴向于旋转轴线A的方向。因此,在第一角取向上,在工件100的面向径向远离旋转轴线A的方向的表面处粘附的任何多余材料由于离心力而被推离工件100,而在工件100的面向径向朝向旋转轴线的方向的表面处粘附的多余材料被推向工件100。因此,虽然在第一角取向上,不是工件100的所有表面都可从多余材料清洁掉,但可通过以第二角取向另外旋转工件100来从多余材料清洁工件100的附加表面。
具体地讲,在工件100为牙冠的情况下,该牙冠形成用于接纳在患者的口中的自然牙齿或支座上的腔。牙冠以第一角取向和第二角取向连续旋转(或反之亦然)提供了移除最大量的多余材料。在这种情况下,牙冠优选地被取向为使得腔在远离容置座8的方向上打开,并且在第一角取向上在旋转轴线A的维度(轴向)上打开。以第一角取向旋转牙冠通常会引起粘附在牙冠外侧上的多余材料从牙冠上移除,而以第二角取向旋转牙冠通常会引起粘附在牙冠内侧的多余材料(即粘附在腔内的多余材料)从牙冠上移除。在第二角取向上,牙冠优选被取向成使得腔在远离容置座8的方向上和在旋转轴线A的径向维度上打开。
如图3所示,回转臂3在回转臂3的第一端部3a处(或附近)悬挂到转子2。此外,回转臂3具有与第一端部3a相对的第二端部3b。容置座8附接在回转臂3的第一端部3a处。另外,工件100附接到容置座8上。回转轴线B布置在工件100和回转臂3的第二端部3b之间。此外,工件100和回转臂的第二端部3b布置在回转轴线B的相对侧上。回转臂3被平衡成使得当工件100在回转臂3处附接到容置座8时,回转臂自然地保持在第二角取向(如图所示)。为了使包括容置座8的回转臂3相对于工件100平衡,回转臂3包括平衡配重物9。平衡配重物9相对于容置座8可以可移动方式布置。另外,平衡配重物9能够相对于容置座8锁定在不同距离处。回转臂3沿纵向轴线C延伸,该纵向轴线在第一角取向上与旋转轴线A一致,并且在第二角取向上相对于旋转轴线A成角度地偏移90度。纵向轴线C还对应于回转臂3和容置座8的惯性轴。因此,在第一角取向上,回转臂3和容置座8(没有工件)可围绕旋转轴线旋转而不会发生失衡。平衡配重物9具体地可沿纵向轴线C移位。在该示例中,平衡配重物9在回转臂3内被线性地引导以便沿纵向轴线C运动。另外,平衡配重物9与螺纹主轴13接合,如果转动,则该螺纹主轴使平衡配重物9沿纵向轴线C移位。由于主轴13和平衡配重物9之间的螺纹连接,平衡配重物9在主轴13不转动的情况下被锁定在适当位置。回转臂3还包括马达11,该马达可在两个转动方向上驱动螺纹主轴13。马达11的转动还可在其角位置进行控制。例如,马达11可以是步进马达或具有位置测量系统的另一个马达。因此,可通过计算机的控制将平衡配重物9的线性位置调节至回转臂3内的期望位置(通过使主轴13转动一定角转动)。根据工件100的重量和质心位置,可将平衡配重物9调节至相对于工件100的质心的适当距离,以使在工件100在第二角取向内旋转期间的任何失衡最小化。例如,工件的质心和最终重量可被传输到装置1(例如,从CAD系统),并且装置1可因此自动调节平衡配重物。
另选地或除此之外,装置1可包括用于感测响应于转子2的旋转而发生的失衡的传感器18(仅示意性地示出)。在该示例中,传感器18是三轴加速度传感器,例如可以商品名MPU 6050购自日本的TDK株式会社(TDK Corp.,Japan)。传感器18优选地机械联接到装置1,使得由转子旋转的失衡引起的振动被机械地传输到传感器18。这可例如通过将传感器18安装到装置1的用于附接旋转驱动装置(未示出)的安装座10来实现。然而,传感器18可同样被安装到装置1的机械联接到转子2的任何其他部件。传感器18可用于测量传感器18可沿其感测加速度的三条轴线中的至少两条轴线上的加速度。在图中,传感器18可沿其感测加速度的三条轴线被指定为X、Y和Z。在感测到加速度的情况下(具体地沿轴线X和轴线Y,但最终也沿轴线Z),平衡配重物9被移位,直到加速度达到最小。从而,平衡配重物9可首先在一个方向上移位,并且在感测到的加速度增加的情况下,平衡配重物9可在相反方向上移位,直到感测到的加速度达到最小。因此,装置1可与不同形状和配置的工件一起使用,并且被配置成在旋转期间自动地重新平衡。
该示例中的马达11经由固定块12固定在回转臂3内。然而,马达11也可通过另选的装置以同样的方式固定或直接固定到回转臂3的部件上。该示例中的马达11经由收集器环(未示出)电连接到电源并最终电连接到数据线。另选地,马达11可经由感应接口电连接到电源并最终电连接到数据线。
图4更详细地示出了具有工件100的容置座8。容置座8具有平坦的接纳表面14和多个定位孔15。定位孔15具有在接纳表面的平面中测量的相对于纵向轴线C的已知位置。定位孔15的位置可用于设计工件,使得其可被固定在容置座上的特定期望位置处。通常,工件被设计成使得工件的质心在通过使用定位孔15安装在容置座8上时与纵向轴线C对准。此外,在该示例中,容置座8可用作3D打印装置中的构建平台。因此,容置座8包括联接件17,容置座8能够通过该联接件可移除地附接到回转臂3。此外,联接件17使得容置座8能够可移除地附接在3D打印装置内,以用于在容置座上直接构建工件100。
图5示出了标明质心16的工件100。在该示例中,质心16在垂直于纵向轴线C的平面中被定位在容置座8的质心101上。因此,可通过将工件设计成与容置座8的形状成适当的位置关系来避免容置座和工件100的组合的任何失衡。
图6示出了在该示例中包括收集容器20的装置1。包括回转臂3、容置座8和工件8的转子2(部分地)设置在收集容器20内。收集容器20是杯形的并且具有底壁20a和周向侧壁20b。周向侧壁20b围绕旋转轴线A布置。因此,从工件100离心出来的任何多余材料由周向侧壁20b收集并最终流向底壁20a。收集容器20具有开口20c,该开口可由封闭件21封闭,如图7所示。收集容器20与封闭件21的组合可形成真空室。可经由连接到真空室的真空泵(未示出)产生真空。该真空可有助于避免或最小化工件上气泡的任何存在。驱动轴4延伸穿过封闭件21,并且旋转驱动装置(图6和图7中未示出)可整个布置在收集容器20的外部。至少周向侧壁20b可为透光的(优选地为透明的)。因此,工件100可暴露于通过周向侧壁20b发射的光。这允许在旋转之后仍然粘附到工件100的任何(最终较少的)残余的多余光硬化材料硬化并成为工件的一部分。此外,可硬化收集在收集容器20中的任何多余的可光硬化材料。这使得收集容器20能够被设置成没有最终有害的非硬化可光硬化材料。
图8和图9分别与图6和图7相同,不同的是封闭件21与旋转驱动装置19组合。同样,包括回转臂3、容置座8和工件8的转子2(部分地)设置在收集容器20内。收集容器20是杯形的并且具有底壁20a和周向侧壁20b。周向侧壁20b围绕旋转轴线A布置。收集容器20具有开口20c,该开口可由封闭件21封闭,如图9所示。在该示例中,旋转驱动装置19布置在收集容器20内部。因此,驱动轴4穿过封闭件21的通道不是必要的。同样,至少周向侧壁20b可为透光的(优选地为透明的),如上所述。
图10示出了直接布置在容置座8上并且将工件100封闭在其中的另选的收集容器20。收集容器20也是杯形的。在该示例中,容置座8(在这种情况下,优选地为构建平台的形式,工件直接构建在该构建平台上)形成收集容器20的封闭件。在该示例中,收集容器20可通过螺纹连接、卡口接头、翼片机构、磁性固定装置等安装到容置座。
图6至图10的示例中的收集容器20可向内设置有吸收层,例如能够吸收和保持液体的织物或羊毛状物。因此,与工件分离并侵入在吸收层上的任何可光硬化材料被吸收和保持。因此,可使返回工件100的飞溅物最小化,并且可使工件100的清洁最大化。吸收层优选地为透光的。例如,织物或羊毛状物优选地具有光可穿过的开口,并且可由允许附加的光穿过的透明或半透明纤维形成。因此,工件100可暴露于光以使工件100上的任何残余的可光硬化材料硬化。同时,保持在吸收层中的可光硬化材料被硬化。包括吸收层的收集容器20或(如果可分离)仅吸收层可在工件100上的任何残余的可光硬化材料硬化之后设置。本领域的技术人员可通过选择不粘结到光硬化材料的用于收集容器20的材料来控制具有保持的光硬化材料的吸收层是否可与收集容器分离。
- 用于在确定工件坐标或加工工件时降低旋转装置的误差的方法和装置
- 用于加工围绕工件轴线旋转的工件的方法和装置