清洁介质安装模块、提供清洁介质的装置及自动清洁系统
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及清洁设备技术领域,尤其涉及一种清洁介质安装模块、提供清洁介质的装置及运用或配置该装置的自动清洁系统。
背景技术
清洁机器人一般采用清洁介质(例如纸巾、拖布等)进行清洁作业。随清洁作业时间的延长,清洁介质上附着的污渍增多,清洁效果变差,不得不将脏清洁介质卸下,换上干净的清洁介质。目前,清洁介质的更换操作多需要人工干预,不够智能。并且用户在更换过程中容易弄脏双手,体验较差。
目前,清洁机器人一般配置有基站,可实现清洁介质的自动更换。具体为,基站中储备有干净的清洁介质,当清洁机器人停靠在基站上时,可先将脏清洁介质卸下,再由基站提供干净的清洁介质供清洁机器人安装。然而,目前的基站中储备的干净清洁介质可以为任意的,难以实现清洁介质与基站的唯一匹配。
发明内容
基于前述的现有技术缺陷,本发明实施例提供了一种清洁介质安装模块、提供清洁介质的装置及运用或配置该装置的自动清洁系统,其实现清洁介质与基站的唯一匹配。
为了实现上述目的,本发明提供了如下的技术方案。
一种清洁介质安装模块,包括:用于卷绕清洁介质的卷轴,所述卷轴的端部设有第一匹配结构,所述第一匹配结构包括孔或凸起;所述孔或凸起的截面为非圆形的任意形状。
一种提供清洁介质的装置,包括:
清洁介质安装模块,包括:卷轴、卷绕在所述卷轴上的清洁介质;所述卷轴的端部设有第一匹配结构;
基站,用于供清洁机器人停放,包括用于容置所述清洁介质安装模块的存储空间;所述存储空间中设有支撑件,所述支撑件上设有与所述第一匹配结构可拆卸配合的第二匹配结构;当所述第一匹配结构与所述第二匹配结构配合时,所述卷轴能相对所述支撑件转动以释放所述清洁介质供所述清洁机器人安装。
优选地,所述第一匹配结构为设在所述卷轴端部的圆柱体轴,所述第二匹配结构为设在所述支撑件上的圆形孔;所述圆柱体轴与所述圆形孔适配且可拆卸连接。
优选地,所述支撑件上设有轴孔,所述卷轴的端部穿设在所述轴孔中并能在所述轴孔中转动;
所述第一匹配结构为插接孔或插接件中的其中之一,所述第二匹配结构为插接孔或插接件中之另一,所述插接件可插拔设置在所述插接孔中,所述插接孔的截面为非圆形,所述插接件的截面形状与所述插接孔的截面形状相适配;所述插接件能相对于所述支撑件旋转。
优选地,所述支撑件上设有电机,所述插接件为所述电机的输出轴;或者,所述插接孔设在所述电机的输出轴端部。
优选地,所述卷轴的端部设有驱动轴,所述驱动轴穿设在所述轴孔中并能在所述轴孔中转动,所述插接孔设在所述驱动轴上。
优选地,所述支撑件为两个,分别为第一支撑件和第二支撑件,所述第一支撑件和第二支撑件上分别设有第一轴孔和第二轴孔;所述第一支撑件和第二支撑件中的至少一个与所述存储空间的底壁可拆卸连接;
所述驱动轴设在所述卷轴的第一端且穿设在所述第一轴孔中,所述卷轴的第二端上设有从动轴,所述从动轴穿设在所述第二轴孔中并能在所述第二轴孔中转动。
优选地,所述第一匹配结构为形成在所述卷轴端部并沿轴向向外延伸的解锁凸起;所述支撑件中设有旋转孔、与所述旋转孔对接连通的锁定通道;
所述第二匹配结构包括:
设在所述旋转孔中的旋转件,所述旋转件中设有与所述解锁凸起相适配的解锁通道、与所述解锁通道对接连通的滑动通道;
设在所述滑动通道中并可在其中滑动的滑块,所述滑块背对所述解锁通道的端面与所述旋转孔的内壁相适配;
设在所述锁定通道中并可在其中滑动的锁块,所述锁块与所述锁定通道的内壁之间设有复位件,所述复位件向所述锁块施加使所述锁块顶触所述旋转件外壁或所述滑块的复位力。
优选地,当所述第一匹配结构与所述第二匹配结构处于配合状态时,所述解锁凸起插入所述解锁通道中,所述滑块被所述解锁凸起顶触而整体位于所述滑动通道中,其背对所述解锁通道的端面与所述旋转件的外壁平齐,所述锁块被所述滑块顶触而整体位于所述锁定通道中。
优选地,当所述第一匹配结构与所述第二匹配结构处于拆卸状态时,所述解锁凸起从所述解锁通道中移出,所述锁块在所述复位件的作用下顶抵所述滑动向所述解锁通道中移动,从而所述锁块一部分位于所述滑动通道中,一部分位于所述锁定通道中,所述锁块抑制所述旋转件在所述旋转孔中的转动。
优选地,卷绕在所述卷轴外的清洁介质包括多个清洁介质单体,每个所述清洁介质单体的宽度在90-130mm之间,长度在-300mm之间。
优选地,所述清洁介质上设有沿其长度方向间隔排布的通孔;所述基站上设有至少一个与所述清洁介质接触以将所述清洁介质导出所述存储空间的推送滚轮、驱动所述推送滚轮旋转的电机、与所述电机连接的控制模块、与所述控制模块连接的计数组件,所述计数组件用于在所述导出模块导出所述清洁介质时统计所述通孔的数量;所述控制模块在所述计数组件统计到的通孔的数量达到设定阈值时控制所述电机停转。
优选地,所述基站包括分离机构,所述控制模块在所述计数组件统计到的通孔的数量达到设定阈值时控制所述分离机构分离所述清洁介质。
一种自动清洁系统,包括:
清洁机器人;
清洁介质安装模块,包括:卷轴、卷绕在所述卷轴上的清洁介质;所述卷轴的端部设有第一匹配结构;
基站,包括:用于供所述清洁机器人停放的停放位、用于存放所述清洁介质的安装位、用于将所述清洁介质导出至所述安装位以供清洁机器人安装的导出机构、用于容置所述清洁介质安装模块的存储空间;所述存储空间中设有支撑件,所述支撑件上设有与所述第一匹配结构可拆卸配合的第二匹配结构;当所述第一匹配结构与所述第二匹配结构配合时,所述卷轴能相对所述支撑件转动以释放所述清洁介质,所述导出机构用于将所述卷轴释放的清洁介质导出至所述安装位以供清洁机器人安装。
通过在清洁介质安装模块的卷轴上设置第一匹配结构,在支撑件上设置与第一匹配结构相配合的第二匹配结构。通过第一匹配结构与第二匹配结构的配合作用,实现支撑件只能与对应的卷轴连接,如此实现清洁介质安装模块与基站的唯一匹配。
此外,通过将卷绕有清洁介质的清洁介质安装模块安装于基站中,可在清洁机器人回归至基站中后,由清洁介质安装模块向清洁机器人自动提供干净的清洁介质。如此,清洁机器人更换清洁介质的操作无需人为手动操作和介入,实现清洁机器人自动化或智能化更换清洁介质,用户体验较佳。
参照后文的说明和附图,详细公开了本发明的特定实施例,指明了本发明的原理可以被采用的方式。应该理解,本发明的实施例在范围上并不因而受到限制。
针对一种实施例描述和/或示出的特征可以以相同或类似的方式在一个或更多个其它实施例中使用,与其它实施例中的特征相组合,或替代其它实施例中的特征。
应该强调,术语“包括/包含”在本文使用时指特征、整件、步骤或组件的存在,但并不排除一个或更多个其它特征、整件、步骤或组件的存在或附加。
附图说明
在此描述的附图仅用于解释目的,而不意图以任何方式来限制本发明公开的范围。另外,图中的各部件的形状和比例尺寸等仅为示意性的,用于帮助对本发明的理解,并不是具体限定本发明各部件的形状和比例尺寸。本领域的技术人员在本发明的教导下,可以根据具体情况选择各种可能的形状和比例尺寸来实施本发明。在附图中:
图1至图4为本发明一个非限制性实施例的自动清洁系统的结构示意图;其中,图1为清洁机器人运行至基站上处于卸下脏清洁介质时的状态示意图;图2为清洁机器人在基站上等待干净清洁介质导出时的状态示意图;图3为清洁机器人安装基站导出的干净清洁介质时的状态示意图;图4为清洁机器人完成干净清洁介质安装离开基站并且基站的存储空间被打开以便更换清洁介质安装模块时的状态示意图;
图5为处于展开状态的清洁介质的第一实施例的正视结构示意图;
图6为处于展开状态的清洁介质的第二实施例的正视结构示意图;
图7为清洁介质导出机构的结构示意图和控制逻辑图;
图8为本发明第一实施例的清洁介质安装模块与支撑件的装配结构示意图;
图9为图8所示的清洁介质安装模块的剖视图;
图10为图9中A-A截面的剖视图;
图11为图8所示的清洁介质安装模块的立体结构示意图;
图12为本发明第二实施例的清洁介质安装模块与支撑件的装配结构示意图;
图13为图12所示的清洁介质安装模块的立体结构示意图;
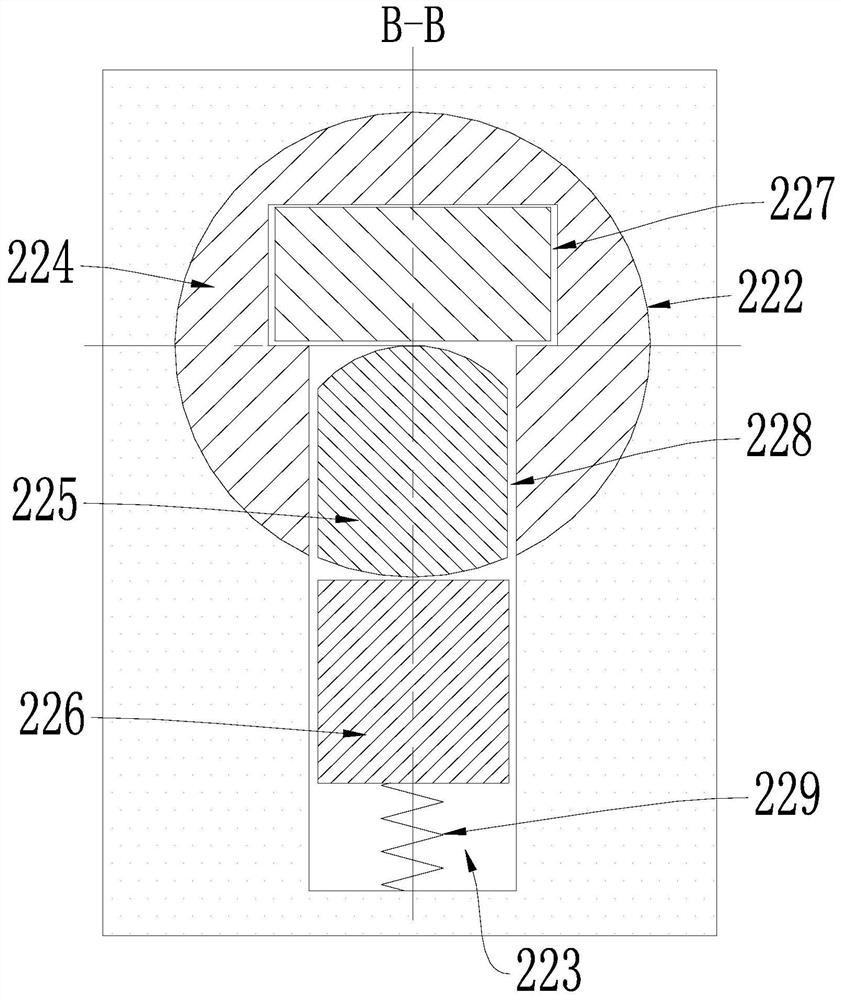
图14为图12中B-B截面的剖视图;
图15为清洁介质安装模块与支撑件处于拆卸状态时B-B截面的剖视图。
具体实施方式
为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应当属于本发明保护的范围。需要说明的是,当元件被称为“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施例。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
本发明实施例公开了一种清洁介质安装模块、用于为清洁机器人提供清洁介质的装置,以及运用或配置该清洁介质提供装置的自动清洁系统。如图1至图4所示,为本发明一个非限制性实施例的自动清洁系统的结构示意图,该自动清洁系统可包括清洁机器人100、供清洁机器人100停靠的基站200、与基站200唯一匹配安装的清洁介质安装模块300。清洁介质提供装置包括基站200与清洁介质安装模块300。
清洁机器人100可以包括但不限于自动拖地机、自动拖扫一体机、自动扫地机、擦窗机等,其可在工作区域内工作,完成拖地、扫地、擦窗等任务。在清洁机器人100需要回归基站200时,启动回归程序,清洁机器人100回归到基站200完成清洁介质400的自动更换或充电等动作。
如图1至图4所示,清洁机器人100包括主体101、用于在工作表面带动主体101移动的移动模块102、设在主体101底部的清洁机构。移动模块102可包括行走轮或者履带结构,清洁机构可包括用于对工作表面执行拖地/擦地工作的擦拭模块103、用于清洁地面/墙角等的尘屑等杂物的滚刷、边刷等。
为了实现清洁机器人100的基本功能,本发明实施例中的清洁机器人100还可以包括其他必需的模块或部件,例如动力机构、动力源和传感器系统等。需要说明的是,清洁机器人100所包括的其他必需的模块或部件,可以选用任意合适的现有构造。为清楚简要地说明本发明所提供的技术方案,在此将不再对上述部分进行赘述,说明书附图也进行了相应简化。但应该理解,本发明在范围上并不因此而受到限制。
在本实施例中,擦拭模块103可安装清洁介质400,清洁介质400为片状,厚度小于0.5cm,包括棉、麻等天然织物或聚酯纤维、尼龙纤维等化工织物,或橡胶、木浆棉等海绵制品,原木浆、脱脂棉等纸制品,及前述合成制品等柔软的一次性用品。在一个实施例中,清洁介质400能够通过与工作表面的摩擦产生静电,如静电纸,从而吸附头发等。在一个实施例中,清洁介质400具有吸水功能且能在一段时间内保持完整性。
基站200大致呈规定的块状或板状结构,其上表面可形成供清洁机器人100停放的停放位201和用于存放清洁介质400的安装位202。以清洁机器人100回归基站200时的运动方向为基准(即如图1至图4所示意的由右至左的方向),停放位201处于安装位202的后方。进一步地,基站200的上表面还形成有坡面203,坡面203位于停放位201的后方,以方便清洁机器人100通过爬坡运行到停放位201。基站200还设有收集框204,位于安装位202的前方,用于回收清洁机器人100卸下的脏清洁介质400’。
如图1所示,当清洁机器人100回归到基站200,移动至擦拭模块103位于收集框204上方时,可将已使用的或脏清洁介质400’分离,分离后的清洁介质400’进入掉落至收集框204中。随后,如图2和图3所示,清洁机器人100后退至擦拭模块103位于安装位202。
基站200包括用于容置清洁介质安装模块300的存储空间205和用于将干净的清洁介质400导出至安装位202的导出机构,以供清洁机器人100安装。如图4所示,存储空间205包括可枢转的盖体206,供用户打开以更换清洁介质安装模块300。
在本实施例中,清洁介质安装模块300包括卷轴302,干净的清洁介质400可卷绕在卷轴302上。因此,存储空间205中容置的干净清洁介质400是连续的,从而保证存储空间205中的清洁介质400在用户安装完毕后能够在导出机构的作用下持续导出。当安装位202上的清洁介质400长度满足预设长度后,导出机构停止工作。基站200还包括检测模块,用于检测位于安装位202上的清洁介质400长度,控制模块500(MCU)根据检测模块的检测结果控制导出机构。
在本实施例中,控制模块500可以按任何适当的方式实现。具体的,例如,控制模块500可以采取例如微处理器或处理器以及存储可由该微处理器或处理器执行的计算机可读程序代码(例如软件或固件)的计算机可读介质、逻辑门、开关、专用集成电路(ApplicationSpecific Integrated Circuit,ASIC)、可编程逻辑控制器(Programmable LogicController,PLC)和嵌入微控制单元(Microcontroller Unit,MCU)的形式,上述模块的例子包括但不限于以下微控制单元:ARC 625D、Atmel AT91SAM、Microchip PIC18F26K20以及Silicone Labs C8051F320。本领域技术人员也应当知道,除了以纯计算机可读程序代码方式实现所述控制模块500的功能以外,完全可以通过将方法步骤进行逻辑编程来使得控制单元以逻辑门、开关、专用集成电路、可编程逻辑控制器和嵌入微控制单元等形式来实现相同功能。
如图1至图4所示,基站200还包括分离机构,用于分离清洁介质400,包括切割装置207和传动装置208。当检测模块检测到的清洁介质400长度满足预设长度,控制模块500通过传动装置208控制切割装置207接触并作用于清洁介质400,从而切断清洁介质400,将安装位202上的清洁介质400与存储空间205中的清洁介质400分离开。
本实施例中,切割装置207包括安装于刀片架的刀片,传动装置208包括凸轮,刀片架下方与凸轮接触,凸轮在电机的作用下旋转,使得刀片架在高度方向上移动。刀片架上方与弹簧连接,弹簧提供使刀片架向下移动的复位力,保持刀片架压紧于凸轮。控制模块500通过控制电机带动凸轮绕电机输出轴旋转,由凸轮变化的直径对刀片架形成向上的推力,从而控制刀片架在高度方向上移动,使得刀片接触或不接触清洁介质400。
如图1至图4所示,基站200包括容置空间209,分离机构设在容置空间209中。容置空间209与存储空间205之间设有穿设通道210,用于供清洁介质400通过。此外,容置空间209的上端开口,与安装位202对接连通。由于切割装置207包括刀片等锋利的切割元件,为了保证用户安全,容置空间209的上端开口宽度小于等于3cm,防止用户伸入上端开口接触切割装置207。
如图5和图6所示,在一种情况下,卷轴302上卷绕的清洁介质400由若干个标准尺寸的清洁介质单体401连接而成,每个清洁介质单体401的宽度a在90-130mm之间,长度b在250-300mm之间。相邻清洁介质单体401之间通过切割线402分隔,从而清洁介质单体401之间的连接强度较小,清洁机器人1001在安装清洁介质400的过程中可以将清洁介质400自然分离。
当然,清洁介质400可以并不限于上述实施例,其可以为整体构造,具有较佳的强度,需要借助分离机构的切割作用获得所需尺寸的清洁介质400。
如图1至图4、图7所示,导出机构可包括至少一个与清洁介质400接触以将清洁介质400导出存储空间205的推送滚轮211以及驱动推送滚轮211旋转的电机212。优选地,每两个推送滚轮211构成为一个导出单元,导出单元包括的两个推送滚轮211之间间隔,供清洁介质400穿过。存储空间205靠近穿设通道210的位置处可设有多组这样的导出单元,而容置空间209中空间其上端开口处的位置也可以设置至少一组这样的导出单元。同一组导出单元中的两个推送滚轮211反向旋转,从而将清洁介质400持续的朝安装位202输送和擩推。
由于清洁介质400较为柔软,易褶皱。当导出机构将清洁介质400导出后,为了便于清洁机器人100正常安装清洁介质400,清洁介质400优选为保持较平整的状态。因此,基站200还可包括展平机构,其设在容置空间209中并靠近上端开口。在一个实施例中,展平机构可通过气流方式保持清洁介质400的平整。具体的,如图1至图4所示,展平机构包括风机213,当导出机构工作时,风机213一起工作,风机213的出风口朝向安装位202,清洁介质400在气流的带动下朝向安装位202移动。由于风机213出风口的气流在平行于清洁介质400的方向对清洁介质400产生作用力,使得清洁介质400保持水平方向的展开状态。
在一个实施例中,为实现所需尺寸的清洁介质400长度,以便导出机构和分离机构能够根据清洁介质400的长度进行操作,如图6所示,清洁介质400上设有沿其长度方向间隔排布的通孔403。驱动推送滚轮211旋转的电机212与控制模块500连接,检测模块可以为在导出模块导出清洁介质400时统计通孔403数量的计数组件214,控制模块500在计数组件214统计到的通孔403的数量达到设定阈值时控制电机212停转。
在本实施例中,计数组件214可以为红外传感器,包括发射器214a和接收器214b,分别设在清洁介质400的两侧。当清洁介质400被导出机构推动而运动时,发射器214a发出的红外信号间断的通过通孔403被接收器214b所接收感应,从而实现通孔403的数量统计。由于相邻通孔403之间的距离相等,因此,通过统计预定数量的通孔403数量,即可实现清洁介质400长度的测量。
当然,计数组件214并不限于上述红外传感器,其还可以包括其他任意可行的构造,例如脉冲计数器,包括脉冲编码器和接收器。脉冲编码器发射脉冲信号间断通过清洁介质400上的推通孔被接收器接收,实现计数。
当计数组件214统计到的通孔403的数量达到设定阈值时,说明导出至安装位202上的清洁介质400也相应的达到设定长度。则此时控制模块500可控制导出机构的电机212停转,并控制分离机构的电机开启。清洁介质400停止继续向安装位202运行,并被切断。
为实现清洁介质安装模块300与基站200的唯一匹配,卷轴302的端部可设有第一匹配结构。基站200的存储空间205中设有支撑件,支撑件上设有与第一匹配结构可拆卸配合的第二匹配结构。当第一匹配结构与第二匹配结构配合时,卷轴302能相对支撑件转动以释放清洁介质400,导出机构将卷轴302释放的清洁介质400导出至安装位202以供清洁机器人100安装。
通过在清洁介质安装模块300的卷轴302上设置第一匹配结构,在支撑件上设置与第一匹配结构相配合的第二匹配结构。通过第一匹配结构与第二匹配结构的配合作用,实现支撑件只能与对应的卷轴302连接,如此实现清洁介质安装模块300与基站200的唯一匹配。
此外,通过将卷绕有清洁介质400的清洁介质安装模块300安装于基站200中,可在清洁机器人100回归至基站200中后,由清洁介质安装模块300向清洁机器人100自动提供干净的清洁介质400。如此,清洁机器人100更换清洁介质400的操作无需人为手动操作和介入,实现清洁机器人100自动化或智能化更换清洁介质400,用户体验较佳。
如图9所示,卷轴302具有相对的两端,分别可以为第一端和第二端。第一匹配结构可以为一个,设在第一端和第二端中的任意一个;也可以为两个,分别设在第一端和第二端。支撑件的数量优选为两个,分别为第一支撑件216和第二支撑件217。相应地,第二匹配结构可以为一个,设在第一支撑件216和第二支撑件217中的任意一个;也可以为两个,分别设在第一支撑件216和第二支撑件217上。
进一步地,第一支撑件216和第二支撑件217中的至少一个与存储空间205的底壁可拆卸连接。籍此,实现清洁介质安装模块300的安装。例如,第一支撑件216和/或第二支撑件217可通过粘胶、螺栓与存储空间205的底壁实现可拆卸连接。
在一个可行的实施例中,第一匹配结构可以为设在卷轴302端部的圆柱体轴,第二匹配结构对应为设在支撑件上的圆形孔;圆柱体轴与圆形孔适配且可拆卸连接。在本实施例中,圆柱体轴可以与卷轴302一体设置,卷绕在卷轴302上的清洁介质400的宽度小于卷轴302的长度,从而设在卷轴302端部的圆柱体轴位于卷状的清洁介质400的外侧。圆柱体轴的外径略小于设在支撑件上的圆形孔的孔径,两者之间间隙配合,从而卷轴302可相对支撑件旋转。
如此,在支撑件上的圆形孔的孔径一定的情况下,仅具有与该圆形孔相适配的圆柱体轴的卷轴302,才能与支撑件的唯一对应连接。从而,实现清洁介质安装模块300与基站200的唯一匹配。
在该实施例中,当第一匹配结构与第二匹配结构配合时,第一匹配结构可相对第二匹配结构沿周向转动。即,第一匹配结构与第二匹配结构沿周向不固定。
如图8至图11所示,在另一个可行的实施例中,支撑件上设有轴孔,卷轴302的端部穿设在轴孔中并能在轴孔中转动。在本实施例中,轴孔也为圆形孔,卷轴302的端部可设有圆柱状回转部件,该圆柱状回转部件可以为卷轴302的端部自身,与卷轴302一体构造;也可以为设在卷轴302端部的驱动轴218,与卷轴302端部可拆卸连接。
具体的,在支撑件为两个的实施例中,第一支撑件216和第二支撑件217上分别设有第一轴孔和第二轴孔,驱动轴218设在卷轴302的第一端且穿设在第一轴孔中,卷轴302的第二端上设有从动轴219,从动轴219穿设在第二轴孔中并能在第二轴孔中转动。
在该实施例中,当第一匹配结构与第二匹配结构配合时,第一匹配结构不可相对第二匹配结构沿周向转动。即,第一匹配结构与第二匹配结构沿周向固定。
如图10和图11所示,第一匹配结构可以为设在卷轴302端部的插接孔301,在卷轴302的端部设有驱动轴218的实施例中,插接孔301可设在驱动轴218上。具体的,插接孔301可以为卷轴302端部或者驱动轴218的端部向内凹陷形成的盲孔,其截面为非圆形,例如可以包括但不限于多边形(三角形、四边形、六边形、八边形等)、椭圆形、异形,等等。
第二匹配结构对应为可插拔设置在插接孔301中的插接件215,插接件215的截面形状与插接孔301的截面形状相适配,并且插接件215可相对于支撑件旋转。插接件215可呈杆状、柱状或轴状,其可以通过与之适配的插接孔301向卷轴302输出旋转动力,以驱动卷轴302实现主动式旋转。当然,插接件215也可以不向卷轴302输出动力,而使卷轴302仅依靠导出机构对清洁介质400施加的拖曳作用力实现被动式旋转。
当然,在其他可行的实施例中,插接孔和插接件与第一、第二匹配结构的对应情况也可与上述相反,即第一匹配结构为插接件,第二匹配结构为插接孔。综合言之,第一匹配结构可以为插接孔和插接件两者中的其中一个,第二匹配结构为插接孔和插接件两者中的另一个。
在使卷轴302实现主动旋转的实施例中,支撑件上可设有电机220,在第一匹配结构为插接件215的实施例中,插接件215可以为电机的输出轴,即电机的输出轴构成插接件215。或者插接件215可以为额外的构件,与电机的输出轴连接。
电机220的机壳固定在支撑件上,其输出轴延伸进入轴孔中。相应的,由电机220的输出轴所构成的插接件215,或者额外设置的、与电机220的输出轴连接的插接件215也位于轴孔中。第二匹配结构为设在卷轴302端部或驱动轴218端部的插接孔301,卷轴302的端部或者驱动轴218穿设在轴孔中,插接件215插设在插接孔301中,籍此实现电机220的输出轴与设在卷轴302或驱动轴218端部的传动连接。
在第一匹配结构为插接孔的实施例中,该插接孔可设在电机220的输出轴端部。第二匹配结构为设在卷轴302端部或驱动轴218端部的插接件。卷轴302的端部或者驱动轴218穿设在支撑件的轴孔中,插接件插设在插接孔中,同样也可实现电机220的输出轴与设在卷轴302或驱动轴218端部的传动连接。
而在卷轴302实现被动式旋转的实施例中,支撑件的轴孔中可设有轴承,插接件215可固定在轴承的圆心位置处,插接件215借助轴承实现相对于支撑件的可旋转。则在该实施例中,插接件215可作为识别卷轴302上的插接孔301是否能与其配合的部件,籍此实现卷轴302与支撑件的唯一匹配。
同样的,在设于支撑件上插接件215不变的情况下,仅具有与插接件215的截面形状相适配的插接孔301的卷轴302,才能实现卷轴302与插接件215的安装与连接。从而,实现清洁介质安装模块300与基站200的唯一匹配。
如图12至图15所示,在又一个可行的实施例中,第一匹配结构可以为形成在卷轴302端部并沿轴向向外延伸的解锁凸起221。解锁凸起221优选与卷轴302一体构造,其大致可呈矩形块体状。支撑件中可设有旋转孔222以及与旋转孔222对接连通的锁定通道223,旋转孔222为圆形孔,锁定通道223可以为矩形通道,其一端与旋转孔222对接连通。
第二匹配结构可以包括设在旋转孔222中的旋转件224、滑块225和锁块226。其中,旋转件224呈圆盘状或圆饼状,可在旋转孔222中旋转。旋转件224中设有与解锁凸起221相适配的解锁通道227以及与解锁通道227对接连通的滑动通道228。滑块225设在滑动通道228中并可在其中滑动,其背对解锁通道227的端面(如图14和图15所示意的下端面)与旋转孔222的内壁相适配,即滑块225的下端面呈圆弧形。锁块226设在锁定通道223中并可在其中滑动,其与锁定通道223的内壁之间设有复位件229,复位件229向锁块226施加使锁块226顶触旋转件224外壁或滑块225的复位力。如图14和图15所示,锁定通道223呈上下方向延伸,复位件229为弹簧,其上端顶抵锁块226或与锁块226固定连接,下端顶抵锁块226或与锁定通道223的底壁固定连接。
如图14所示,当解锁凸起221插入解锁通道227中时,解锁凸起221顶触滑块225向下移动,至滑块225整体位于滑动通道228中,其弧形下端面刚好与旋转件224的外表面平齐,而锁块226被滑块225顶触也向下移动也整体位于锁定通道223中。则此时,第一匹配结构与第二匹配结构处于配合状态时,旋转件224连同滑块225和解锁凸起221能相对于支撑件旋转,也即是卷轴302能够相对于支撑件旋转。
如图15所示,解锁凸起221从解锁通道227中移出,此时第一匹配结构与第二匹配结构处于拆卸状态。则锁块226在复位件229的作用下顶抵滑块225向解锁通道227中移动,从而使得锁块226一部分位于滑动通道228中,一部分位于锁定通道223中,具体为锁块226的一端位于滑动通道228中,另一端位于锁定通道223中。则此时,锁块226插入旋转件224的滑动通道228,如此旋转件224在旋转孔222中的转动被抑制。
如此,通过在支撑件中设置旋转孔222和锁定通道223,并分别在旋转孔222和锁定通道223中设置可旋转的旋转件224和锁块226,并在旋转件224中设置滑块225。则在旋转件224中设置的解锁通道227不变的情况下,仅具有与解锁通道227的截面形状相适配的解锁凸起221的卷轴302,才能实现卷轴302与支撑件的安装与连接。从而,实现清洁介质安装模块300与基站200的唯一匹配。
需要说明的是,在本发明的描述中,术语“第一”、“第二”等仅用于描述目的和区别类似的对象,两者之间并不存在先后顺序,也不能理解为指示或暗示相对重要性。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
本文引用的任何数字值都包括从下限值到上限值之间以一个单位递增的下值和上值的所有值,在任何下值和任何更高值之间存在至少两个单位的间隔即可。举例来说,如果阐述了一个部件的数量或过程变量(例如温度、压力、时间等)的值是从1到90,优选从21到80,更优选从30到70,则目的是为了说明该说明书中也明确地列举了诸如15到85、22到68、43到51、30到32等值。对于小于1的值,适当地认为一个单位是0.0001、0.001、0.01、0.1。这些仅仅是想要明确表达的示例,可以认为在最低值和最高值之间列举的数值的所有可能组合都是以类似方式在该说明书明确地阐述了的。
除非另有说明,所有范围都包括端点以及端点之间的所有数字。与范围一起使用的“大约”或“近似”适合于该范围的两个端点。因而,“大约20到30”旨在覆盖“大约20到大约30”,至少包括指明的端点。
以上所述仅为本发明的几个实施例,本领域的技术人员依据申请文件公开的内容,可以对本发明实施例进行各种改动或变型而不脱离本发明的精神和范围。
- 清洁介质安装模块、提供清洁介质的装置及自动清洁系统
- 清洁介质安装模块、提供清洁介质的装置及自动清洁系统