一种汽车安全预警系统、加权预警方法
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及车辆驾驶预警领域,特别涉及一种汽车安全预警系统、加权预警方法。
背景技术
驾驶员长时间保持驾驶状态极易产生疲劳,疲劳驾驶极易发生严重事故,有效监测驾驶员是否处于疲劳状态并在驾驶员处于疲劳状态时给予提醒可有效预防事故发生。
当前存在各种检测驾驶员疲劳驾驶的技术,如基于面部表情识别的疲劳驾驶检测技术、基于连续驾驶时间监测的疲劳驾驶检测技术、基于车辆数据的疲劳驾驶检测技术等等,现有技术包括接收采集的驾驶员的正面图像,在采集的图像中进行人脸检测,在检测到的人脸中进一步定位人眼,基于深度神经网络模型,对检测到的人眼进行定位,识别人员状态,以及跟踪多帧图像中人眼的状态的变化,判断驾驶员是否疲劳。该疲劳驾驶检测的方法适用于单个驾驶员的疲劳检测,并不适合多个车辆疲劳驾驶的监控,目前还缺少一个针对多个车辆、多名驾驶员同时疲劳监测和预警的综合管理平台。
发明内容
针对上述技术中存在的不足之处,本发明提供了一种汽车安全预警系统、加权预警方法,具体方案如下:
一种汽车安全预警系统,包括云平台和与云平台进行通信连接的若干个车载终端、无人机、监控终端,所述云平台获取车载终端和无人机的数据进行处理并分类后,发送到监控终端。
具体地说,所述云平台获取的数据包括头部运动参数、眼部运动参数、面部特征参数、驾驶参数、连续不操作方向盘时间、车道线偏离参数。
具体地说,所述车载终端包括终端主板和分别与终端主板对应引脚连接的通信设备、摄像头、角度传感器、导航定位设备。
具体地说,所述云平台包括云平台控制器和分别与云平台控制器对应引脚连接的多参数分类器、计算单元、预警单元、计时单元、通信单元。
具体地说,所述多参数分类器包括:
头部动作分类器,用于对头部处理并分类,输出点头的动作;
眼部动作分类器,用于对眼部动作处理并分类,输出闭眼或眨眼或张开的眼睛的动作;
面部动作分类器,用于对面部动作处理并分类,输出张嘴或打哈欠的动作;
车道偏离分类器,用于对车辆导航路线与车辆实时路线处理并分类,输出车道是否偏离。
具体地说,所述监控终端包括监控终端控制器和分别与监控终端控制器对应引脚连接的运行监测单元、指挥调度单元、信息交互单元。
用于上述汽车预警系统的加权预警方法,包括以下步骤:
S1、云平台对多分类器的结果进行判断,
头部动作疲劳状态Q1:头部动作分类器输出为点头动作时Q1=1,没有输出时Q1=0;
眼部动作疲劳状态Q2:眼部动作分类器输出为闭眼动作时Q2=1,输出为眨眼动作时Q2=0.5,输出为张开眼睛动作时Q2=0;
面部动作疲劳状态Q3:面部动作分类器输出为打哈欠动作时Q3=1,输出为张嘴动作是Q3=0.5,没有输出时Q3=0;
车道偏离疲劳状态Q4:车道偏离分类器输出为车道偏离时Q4=1,输出为车道没有偏离时Q4=0;
S2、对判断后的结果进行加权预算,
疲劳状态值Q=Q1*n1+Q2*n2+Q3*n3+Q4*n4;
其中n1、n2、n3、n4为对应的权重因子,n1+n2+n3+n4=1;
S3、进行疲劳状态分级。
具体地说,步骤S3所述疲劳状态分级设置为:Q<0.25为正常状态;
0.25≤Q≤0.5为一级疲劳;
0.5<Q≤0.75为二级疲劳;
0.75<Q≤1为三级疲劳。
具体地说,在步骤S3后还有步骤S4,步骤S4具体为:
S41、获取当前车辆和相邻车辆的实时动态行驶影像;
S42、进行车辆实时路线和实时位置的计算,获取安全距离;
S43、向小于安全距离的车辆发送预警调度信息。
具体地说,所述预警调度信息包括:疲劳状态、疲劳等级、调度指令;所述调度指令包括:减速、加速、左变道、右变道。
本发明的有益效果在于:
(1)通过云平台对车载终端和无人机获取的头部运动参数、眼部运动参数、面部特征参数、驾驶参数、连续不操作方向盘时间以及车道线偏离参数与预存的多参数分类器进行一一对应分类和计算,获得驾驶员的疲劳状态、疲劳等级,并生成疲劳预警发送给监控终端,形成了一个集多个车辆、多名驾驶员同时进行疲劳监测和预警的综合管理平台,便于实时监测,提高工作效率,也为后续应急调度做准备。
(2)通过获取相邻车辆的位置和运动状态,设置安全距离并对相邻车辆进行调度,实现多车辆、多驾驶员同时疲劳监测并预警调度,提高出行的安全性。
(3)通过汇集头部、眼部、面部、驾驶参数、连续不操作方向盘时间以及车道线偏离几个方面的参数比对,可精确获得驾驶员是否处于疲劳状态,减小误差。
(4)通过设置无人机,避免了导航设备损坏或故障等原因造成的实时定位和路线规划的车辆导航路线不精确,有效地提高了车辆是否偏航的精确判断,为进一步的疲劳驾驶判断提供精确数据支撑。
附图说明
为了更清楚地说明。本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
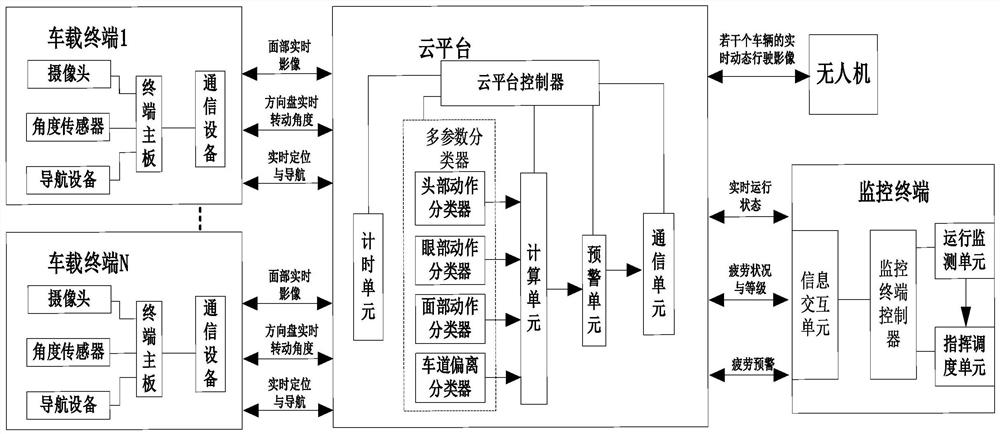
图1为本发明系统结构示意图;
图2为本发明方法流程图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地说明,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
本发明公开了一种汽车安全预警系统、加权预警方法;
一种汽车安全预警系统,包括云平台和与云平台进行通信连接的若干个车载终端、无人机、监控终端,所述云平台获取车载终端和无人机的数据进行处理并分类后,发送到监控终端。
云平台获得的数据包括:头部运动参数、眼部运动参数、面部特征参数、驾驶参数、连续不操作方向盘时间、车道线偏离参数。
所述头部运动参数包括:点头动作幅度、点头动作时间;所述眼部运动参数包括:闭眼时间、眨眼频率、眨眼快慢、眼睛张开幅度、眼睛注视方向的变换频率;所述面部特征参数包括:张嘴打哈欠次数;所述驾驶特征参数包括:连续驾驶时长、全天累计驾驶时长;所述车道线偏离参数包括:车道线偏离次数、车道线偏离时长。
所述车载终端包括终端主板和与终端主板对应引脚连接的:通信设备、摄像头、角度传感器、导航定位设备。
所述云平台包括云平台控制器,和分别与云平台控制器对应引脚连接的多参数分类器、计算单元、预警单元、计时单元、通信单元。
所述多参数分类器包括:头部动作分类器,用于对头部动作处理并分类,输出点头的动作;眼部动作分类器,用于对眼部动作处理并分类,输出闭眼或眨眼或张开的眼睛的动作;面部动作分类器;用于对面部动作处理并分类,输出张嘴或打哈欠的动作;车道偏离分类器,用于对车辆导航路线与车辆实时路线处理并分类,输出车道是否偏离。
所述监控终端包括监控终端控制器和分别与监控终端控制器对应引脚连接的运行监测单元、指挥调度单元、信息交互单元。
用于上述汽车预警系统的加权预警方法包括以下步骤:
S1、云平台对多分类器的结果进行判断,
头部动作疲劳状态Q1:头部动作分类器输出为点头动作时Q1=1,没有输出时Q1=0;
眼部动作疲劳状态Q2:眼部动作分类器输出为闭眼动作时Q2=1,输出为眨眼动作时Q2=0.5,输出为张开眼睛动作时Q2=0;
面部动作疲劳状态Q3:面部动作分类器输出为打哈欠动作时Q3=1,输出为张嘴动作是Q3=0.5,没有输出时Q3=0;
车道偏离疲劳状态Q4:车道偏离分类器输出为车道偏离时Q4=1,输出为车道没有偏离时Q4=0;
S2、对判断后的结果进行加权预算,
疲劳状态值Q=Q1*n1+Q2*n2+Q3*n3+Q4*n4;
其中n1、n2、n3、n4为对应的权重因子,n1+n2+n3+n4=1;
S3、进行疲劳状态分级,Q<0.25为正常状态;
0.25≤Q≤0.5为一级疲劳;
0.5<Q≤0.75为二级疲劳;
0.75<Q≤1为三级疲劳。
在步骤S3后还有步骤S4,步骤S4具体为:
S41、获取当前车辆和相邻车辆的实时动态行驶影像;
S42、进行车辆实时路线和实时位置的计算,获取安全距离;
S43、向小于安全距离的车辆发送预警调度信息。
所述预警调度信息包括:疲劳状态、疲劳等级、调度指令;所述调度指令包括:减速、加速、左变道、右变道。
实施例1
如图1所示,本发明实施例提供了一种汽车安全预警系统,其包括若干个车载终端、云平台、无人机以及监控终端。
若干个车载终端分别对应设置于若干个车辆;每个车载终端包括终端主板和与终端主板对应引脚连接的:通信设备、摄像头、角度传感器、导航定位设备。其中摄像头用于采集面部实时影像、角度传感器采集方向盘实时转动角度、导航定位设备用于实时定位与导航。
云平台通信连接到若干个车载终端,用于数据收发、处理和预警。
无人机通信连接到云平台,用于分别获取若干个车辆的实时动态行驶影像。监控终端通信连接到云平台,用于分别获取若干个车辆实时运行状态和预警信息。
所述云平台包括云平台控制器,和分别与云平台控制器对应引脚连接的多参数分类器、计算单元、预警单元、计时单元、通信单元。计算单元用于根据多参数分类器一一分类后的结果进行加权计算,获得驾驶员是否处于疲劳状态以及疲劳等级。预警单元用于获取驾驶员的疲劳状态和疲劳等级生成疲劳预警发送给监控终端显示和预警。计时单元用于点头动作时间、闭眼时间、眨眼时间、本次连续驾驶时长、全天累计驾驶时长、连续不操作方向盘时间以及车道线偏离时间的计时,为疲劳状态判断提供计时数据参考。
所述监控终端包括监控终端控制器和分别与监控终端控制器对应引脚连接的运行监测单元、指挥调度单元、信息交互单元。运行监测单元用于从云平台获取若干个车辆实时运行状态和预警信息进行显示,提供了实时运行状态监测和预警的功能。指挥调度单元用于当车辆确定为疲劳驾驶时,从运行监测单元获取其他相邻车辆实时运行状态和预警信息进行影响范围分析和调度分析,发出调度信息和当前车辆的疲劳状态与等级给在影响范围内的相邻车辆以预警和规避。所述监控终端为智能终端设备,包括:PC、平板电脑、手机。
系统开始工作,云平台从车载终端获取面部实时影像进行图像处理以获取单位时间内的头部运动参数、眼部运动参数、面部特征参数以及驾驶参数。云平台从角度传感器获取方向盘实时转动角度进行数据分析以获取连续不操作方向盘时间。云平台将从导航设备获取的车辆导航路线与从车辆实时动态行驶影像获取的车辆实时路线比较以获取单位时间内车道线偏离参数。
云平台根据获取的单位时间内的头部运动参数、眼部运动参数、面部特征参数、驾驶参数、连续不操作方向盘时间以及车道线偏离参数与预存的多参数分类器进行一一对应分类和计算,获得驾驶员是否处于疲劳状态、疲劳等级以及疲劳预警发送给监控终端进行显示和预警;汇集头部、眼部、面部、驾驶参数、连续不操作方向盘时间以及车道线偏离几个方面的参数比对,可精确获得驾驶员是否处于疲劳状态,减小误差;相比于单一导航设备的实时定位和车辆导航路线,无人机的加入,将采集的车辆实时动态行驶影像进行图像处理,获得的车辆实时路线与导航设备获取的实时定位和车辆导航路线进行比对,避免导航设备损坏或故障等原因造成的实时定位和路线规划的车辆导航路线不精确,有效地提高了车辆是否偏航的精确判断,为进一步的疲劳驾驶判断提供精确数据支撑。
云平台产生预警信息发送到监控终端进行显示和预警,所述云平台分别与若干个车载终端、无人机以及监控终端通信,形成一个集多个车辆、多名驾驶员同时进行疲劳监测和预警的综合管理平台,便于实时监测,提高工作效率,也为后续应急调度做准备。
所述头部运动参数包括点头动作幅度、点头动作时间;眼部运动参数包括闭眼时间、眨眼频率、眨眼快慢、眼睛张开幅度、眼睛注视方向的变换频率;面部特征参数包括张嘴打哈欠次数;驾驶参数包括本次连续驾驶时长、全天累计驾驶时长;车道线偏离参数包括车道线偏离次数和车道线偏离时长。
通过设置包括点头动作幅度、点头动作时间来反映头部是否有疲劳状态;设置包括闭眼时间、眨眼频率、眨眼快慢、眼睛张开幅度、眼睛注视方向的变换频率来反映眼部是否有疲劳状态;设置包括张嘴打哈欠次数来反映面部是否有疲劳状态;设置包括本次连续驾驶时长、全天累计驾驶时长来反映驾驶员是否有疲劳驾驶历史;设置包括车道线偏离次数和车道线偏离时长来反映车道线是否偏离从而进一步反映驾驶员是否进入疲劳状态。
实施例2
在实施例1所述的系统的基础上,为了更好地进行精确计算,如图2所示,本发明提出了一种用于上述系统的加权预警方法。
S1、判断多分类器的分类结果,头部动作分类器的输出结果为点头动作,则Q1=1,否则Q1=0;眼部动作分类器的输出结果为闭眼动作,则Q2=1;眼部动作分类器的输出结果为眨眼动作,则Q2=0.5;眼部动作分类器的输出结果为张开动作,则Q2=0;面部动作分类器的输出结果为打哈欠,则Q3=1;面部动作分类器的输出结果为张嘴,则Q3=0.5;面部动作分类器无输出结果,则Q3=0;车道偏离分类器的输出结果为偏离,则Q4=1,否则Q4=0;
S2、进行加权运算,疲劳状态值Q=头部动作疲劳状态Q1*n1+眼部动作疲劳状态Q2*n2+面部动作疲劳状态Q3*n3+车道偏离疲劳状态Q4*n4。
其中n1、n2、n3、n4为对应的权重因子,n1+n2+n3+n4=1;
S3、为了更好地判断疲劳状态,更精确地进行疲劳级别划分,优选定义Q<0.25为正常状态;0.25≤Q≤0.5为一级疲劳;0.5<Q≤0.75为二级疲劳;0.75<Q≤1为三级疲劳。
通过上述方法,云平台的计算单元设置为根据多参数分类器的分类结果进行加权计算,进一步提高了疲劳状态判断的精确性,量化地给出疲劳等级,为后续的疲劳预警和安全调度提供数据参考与支撑。
所述云平台与若干个车载终端、无人机以及监控终端之间,优选采用无线的通信方式。
S41、监控终端通过云平台获取当前车辆和相邻车辆的实时动态行驶影像。
S42、根据当前车辆和相邻车辆的实时动态行驶影像进行车辆实时路线和实时位置的计算获取安全距离,将实时距离小于安全距离的相邻车辆标注出来。
S43、向小于安全距离的相邻车辆发送预警调度信息,具体地,预警信息包括:疲劳状态、疲劳等级;调度信息包括:减速、加速、左变道、右变道。
尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种汽车安全预警系统、加权预警方法
- 一种智能网联汽车安全预警系统及预警方法