清洁机器人的控制方法及清洁系统
文献发布时间:2023-06-19 12:22:51
技术领域
本申请涉及清洁系统技术领域,尤其涉及一种清洁机器人的控制方法及清洁系统。
背景技术
随着人们生活水平的提高和智能家居的发展,越来越多家庭都会购买扫地机器人来辅助用户清洁家庭环境。扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。但是扫地机器人清洁一段时间后,需要用户手动对扫地机器人进行维护,包括对扫地机器人清理尘盒。用户手动给扫地机器人的维护工作会比较麻烦,给扫地机器人的使用带来较大不便。
发明内容
本申请提供了一种清洁机器人的控制方法及清洁系统,以提高清洁机器人的维护操作的效率,降低用户的工作量。
第一方面,本申请提供了一种清洁机器人的控制方法,清洁机器人的控制方法,用于清洁系统,所述清洁系统包括维护设备、清洁机器人和控制设备,所述清洁机器人包括移动组件;所述清洁机器人的控制方法包括:
与所述控制设备建立通信连接;
通过所述控制设备发送操作控制指令至所述清洁机器人和/或所述维护设备;所述操作控制指令包括注液控制指令、集尘控制指令和清洁控制指令中的至少一种;
所述清洁机器人接收所述操作控制指令,并根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行与所述操作控制指令对应的操作任务;
所述维护设备接收所述操作控制指令,并根据所述操作控制指令控制所述维护设备对所述清洁机器人进行维护操作,所述维护操作包括集尘操作、注液操作、充电操作、更换配件操作、清洗配件操作中的至少一种。
第二方面,本申请还提供了一种清洁系统,包括:控制设备,用于发送操作控制指令至所述清洁机器人和/或所述维护设备;所述操作控制指令包括注液控制指令、集尘控制指令和清洁控制指令中的至少一种;清洁机器人,包括移动组件,所述清洁机器人用于在接收到所述操作控制指令时,根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行与所述操作控制指令对应的操作任务;维护设备,用于在接收到清洁控制信号时,根据所述操作控制指令控制所述维护设备对所述清洁机器人进行维护操作,所述维护操作包括集尘操作、注液操作、充电操作、更换配件操作、清洗配件操作中的至少一种。
本申请公开了一种清洁机器人的控制方法及清洁系统,通过所述控制设备发送操作控制指令至所述清洁机器人和/或所述维护设备;所述清洁机器人接收所述操作控制指令,并根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行与所述操作控制指令对应的操作任务;所述维护设备接收所述操作控制指令,并根据所述操作控制指令控制所述维护设备对所述清洁机器人进行维护操作,用户无需手动给清洁机器人进行维护工作,维护设备可以自动对清洁机器人进行维护,可以提高清洁机器人的维护操作的效率,降低用户的工作量。
附图说明
为了更清楚地说明本申请实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本申请一实施例提供的清洁系统的结构示意图;
图2是本申请一实施例提供的维护设备的结构示意图,其中,手势检测装置设置在座体的侧部;
图3是本申请一实施例提供的维护设备的结构示意图,其中,手势检测装置设置在维护本体的顶部;
图4是本申请一实施例提供的维护设备的部分爆炸结构示意图;
图5是本申请一实施例提供的维护设备的部分结构示意图,其中盖体打开;
图6是本申请一实施例提供的维护设备在一角度的剖视图;
图7是本申请一实施例提供的维护设备在另一角度的剖视图;
图8是图7在B处的局部放大示意图;
图9是本申请一实施例提供的储液结构的结构示意图;
图10是本申请一实施例提供的储液结构的爆炸示意图;
图11是图5在A处的局部放大示意图;
图12是本申请一实施例提供的维护设备的部分结构示意图;
图13是本申请一实施例提供的维护设备的部分结构示意图;
图14是图13在C处的局部放大示意图;
图15是本申请实施例提供的清洁机器人的控制方法的示意流程图。
附图标记说明:
10、维护设备;
100、维护本体;110、座体;111、收容部;112、敞开口;113、储液结构安装槽;114、支撑台;1141、转轴孔;115、动力件安装腔;120、盖体;121、盖合本体;122、转轴部;123、连接部;1231、第一连接子部;1232、第二连接子部;
200、加液组件;210、储液结构;211、出液孔;212、卡合结构;213、凹槽;220、阻液机构;221、阻液件;222、复位件;223、锁固件;230、顶出机构;231、顶出件;232、安装座;233、移动座;234、弹性件;235、导液流道;
300、驱动组件;310、动力件;320、传动机构;321、主动轮;322、从动轮;
400、手势检测装置;
20、清洁机器人。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
附图中所示的流程图仅是示例说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解、组合或部分合并,因此实际执行的顺序有可能根据实际情况改变。
应当理解,在此本申请说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本申请。如在本申请说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
还应当进一步理解,在本申请说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
本申请实施例提供一种清洁机器人的控制方法,用于清洁系统,所述清洁系统包括维护设备、清洁机器人和控制设备,所述清洁机器人包括移动组件;所述清洁机器人的控制方法包括:与所述控制设备建立通信连接;通过所述控制设备发送操作控制指令至所述清洁机器人和/或所述维护设备;所述操作控制指令包括注液控制指令、集尘控制指令和清洁控制指令中的至少一种;所述清洁机器人接收所述操作控制指令,并根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行与所述操作控制指令对应的操作任务;所述维护设备接收所述操作控制指令,并根据所述操作控制指令控制所述维护设备对所述清洁机器人进行维护操作,所述维护操作包括集尘操作、注液操作、充电操作、更换配件操作、清洗配件操作中的至少一种。
本申请实施例还提供了一种清洁系统,包括:控制设备,用于发送操作控制指令至所述清洁机器人和/或所述维护设备;所述操作控制指令包括注液控制指令、集尘控制指令和清洁控制指令中的至少一种;清洁机器人,包括移动组件,所述清洁机器人用于在接收到所述操作控制指令时,根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行与所述操作控制指令对应的操作任务;维护设备,用于在接收到清洁控制信号时,根据所述操作控制指令控制所述维护设备对所述清洁机器人进行维护操作,所述维护操作包括集尘操作、注液操作、充电操作、更换配件操作、清洗配件操作中的至少一种。
本申请实施例还提供一种清洁系统,包括:控制设备,用于发送操作控制指令至所述清洁机器人和/或所述维护设备;所述操作控制指令包括注液控制指令、集尘控制指令和清洁控制指令中的至少一种;清洁机器人,具有容尘组件、液体容纳部和移动组件;用于在接收到所述操作控制指令时,根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行与所述操作控制指令对应的清洁操作;所述维护设备,用于在接收到清洁控制信号时,根据所述操作控制指令控制所述维护设备对所述清洁机器人进行维护操作,所述维护操作包括集尘操作、注液操作、充电操作、更换配件操作、清洗配件操作中的至少一种;其中,所述维护设备包括:座体,设有收集口、接液孔和收容部;集尘组件,设于所述座体上,所述集尘组件包括收容于所述收容部上的集尘体,所述清洁机器人的脏物容纳部内的物质能够经所述收集口转移至所述集尘体;加液组件,设于所述座体上,所述加液组件包括具有出液孔的储液结构,所述储液结构内的液体能够通过所述出液孔进入所述接液孔。
上述清洁机器人的控制方法及清洁系统,通过所述控制设备发送操作控制指令至所述清洁机器人和/或所述维护设备;所述清洁机器人接收所述操作控制指令,并根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行与所述操作控制指令对应的操作任务;所述维护设备接收所述操作控制指令,并根据所述操作控制指令控制所述维护设备对所述清洁机器人进行维护操作,用户无需手动给清洁机器人进行维护工作,维护设备可以自动对清洁机器人进行维护,可以提高清洁机器人的维护操作的效率,降低用户的工作量。
下面结合附图,对本申请的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
请参阅图1-图14,本申请的实施例提供了一种清洁系统,该清洁系统包括清洁机器人20和维护设备10。清洁机器人20能够吸入地面上的杂物或脏污等,从而完成对地面的清理工作。维护设备10能够根据实际需要对清洁机器人20进行维护操作,例如集尘操作、注液操作、充电操作等中的至少一种。
在一些实施例中,清洁机器人20具有容尘组件、液体容纳部和移动组件。清洁机器人20在接收到操作控制指令时,根据操作控制指令控制移动组件移动,并控制清洁机器人20执行与操作控制指令对应的清洁操作。
请参阅2-图14,在一些实施例中,维护设备10包括维护本体100、集尘组件和加液组件200。集尘组件和加液组件200均设于维护本体100上。
在一些实施例中,维护本体100包括座体110和盖体120。座体110上设有收容部111和与收容部111连通的敞开口112。盖体120能够盖合或打开敞开口112。座体110上还设有收集口和接液孔。
在一些实施例中,集尘组件设于座体110上。集尘组件包括收容于收容部111上的集尘体。清洁机器人20的脏物容纳部内的物质能够经收集口转移至集尘体。
在一些实施例中,加液组件200设于座体110上。加液组件200包括具有出液孔211的储液结构210,储液结构210内的液体能够通过出液孔211进入接液孔。
具体地,座体110上设有导液流道235,接液孔设于导液流道235靠近储液结构210的一端。储液结构210上的出液孔211通过该接液孔与导流流道连通,储液结构210内的水能够通过出液孔211、接液孔进入导液流道235,从而为清洁机器人20供给液体。
具体地,当清洁机器人20需要对地面进行清理或清洗时,维护设备10可以用户清除清洁机器人20上的垃圾或者向清洁机器人20注入液体,以使得清洁机器人20能够有足够的空间容纳从地面上清理的垃圾和/或清洁机器人20内能够有足够的液体对地面进行清洗。或者,在扫地机器人完成清理或清洗后,集尘体可以用于存放清洁机器人20转移过来的垃圾或灰尘,储液结构210通过导液流道235向清洁机器人20的液体容纳部注入液体,从而使得清洁机器人20能够再次对地面进行清理或清洗。
可以理解地,集尘组件和加液组件200中的任意一个也可以省略,也可以同时设置集尘组件和加液组件200。在一些实施例中,维护设备10上设有储液结构210和/或集尘体。在一些具体实施方式中,集尘体至少部分收容于收容部111内,即至少部分集尘体能够收容在收容部111内。储液结构210可拆卸安装在座体110上。当储液结构210内的液体不足时,储液结构210的可拆卸安装方式便于向储液结构210中补充液体或更换具有足量液体的另一储液结构210,以保证维护设备10能够正常为清洁机器人20注入液体。
在一些实施方式中,集尘体可拆卸安装在收容部111上。当集尘体内的物质或脏物达到一定量时,集尘体的可拆卸安装方式便于将集尘体取出,以方便用户清理集尘体内的物质或脏物,或者方便用户更换另一集尘体,从而保证维护设备10能够正常对清洁机器人20进行集尘操作,并防止集尘体内的物质溢出污染维护设备10。集尘体可以根据实际需求设计为任意能够容纳物质或脏物的结构,比如包括集尘盒、集尘袋等中的至少一种。
在一些实施例中,维护设备10还包括集尘体检测装置。集尘体检测装置用于检测集尘体的集尘体使用数据,以使维护设备10根据集尘体使用数据发出维护提示信息,从而提示用户对集尘体进行维护操作。具体地,集尘体检测装置可以为任意合适的检测结构,例如能够检测集尘体内物质多少的传感器等。集尘体检测装置能够根据实际需求检测集尘体内的物质或脏污情况,以使得维护设备10在将脏物容纳部内的物质抽至集成体时,集尘体检测装置能够实时或定时监测集尘体内的储物情况。维护设备10能够根据该集尘体使用数据,发送维护提示信息以提示用户对集尘体进行维护操作。
上述实施例的维护设备10,通过集尘体检测装置能够根据实际需求检测集尘体内的物质或脏污情况,以使得维护设备10在将脏物容纳部内的物质抽至集成体时,集尘体检测装置能够实时或定时监测集尘体内的储物情况用于根据该储物情况向用户发送集尘体的维护提示信息,无需人工频繁去检查集尘体内的物质或脏物是否装满以及是否需要及时清理集尘体,降低了用户的工作量,并保证了维护设备10能够正常对清洁机器人20进行集尘操作,并防止集尘体内的物质溢出污染维护设备10。
在一些实施例中,集尘组件还包括集尘通道和驱动件。集尘通道设于收集口与集尘体之间。驱动件设置于座体110上,驱动件用于将清洁机器人20的脏物容纳部内的物质经收集口、集尘通道转移至集尘体。驱动件可以是风扇等带动气流流动的结构,在此不作限制。驱动件能够产生吸力,使得清洁机器人20中的脏物或物质通过收集口、集尘通道转移至集尘体内,从而完成对清洁机器人20进行集尘操作。
在一些实施例中,加液组件200还包括阻液机构220和顶出机构230。阻液机构220设于储液结构210上。阻液机构220包括阻液件221。阻液件221具有初始位置和出液位置;阻液件221位于初始位置时,储液结构210上的液体不能够通过出液孔211进入接液孔;当阻液件221位于出液位置时,储液结构210内的液体能够通过出液孔211进入接液孔。可以理解地,阻液件221的出液位置可以具有一个、两个或者更多,在此不作限定。
在一些实施例中,储液结构210可以根据实际需求安装在座体110上的任意合适位置。在一些实施方式中,至少部分储液结构210和至少部分集尘体均收容于收容部111。在另一些实施方式中,座体110上设有储液结构安装槽113。接液孔安装在储液结构安装槽113的底部。具体地,储液结构210可拆卸安装在储液结构安装槽113上。更为具体地,储液结构安装槽113设于座体110的侧部。在一些实施方式中,储液结构安装槽113与收容部111连通。在一些实施例中,顶出机构230设于座体110上。至少部分顶出机构230与阻液件221配合以使阻液件221在初始位置和出液位置之间切换。
在一些实施例中,加液组件200还包括液体检测装置。液体检测装置设于储液结构210上,用于采集储液结构210的液体数据以使得维护设备10根据液体数据发送加液提示信息以提示用户向储液结构210加液。具体地,液体检测装置可以为任意合适的检测结构,例如能够检测液体情况的传感器,比如气泡传感器等。
上述实施例的维护设备10,通过液体检测装置能够根据实际需求检测储液结构210内的液体情况,以使得维护设备10的储液结构210向清洁机器人的液体容纳部注液时,液体检测装置能够实时或定时监测储液结构210内的储液情况即检测储液结构210内的液体数据。维护设备10能够根据液体数据,发送维护提示信息以提示用户对储液结构210进行补充液体或更换另一具有足量液体的储液结构210,从而保证储液结构210能够正常地为清洁机器人20注入液体,无需人工频繁去检测维护设备的储液结构内液体是否充足以及是否需要及时补水,降低了用户的工作量,并保证了维护设备10能够正常对清洁机器人20进行注液操作。
在一些实施例中,液体检测装置包括红外液量传感器、超声液量传感器、压力液量传感器和电容式液量传感器等中的至少一种,在此不作限定。红外液量传感器是指通过红外技术检测液量的传感器。其他液量传感器同理,在此不再赘述。
在一些实施例中,顶出机构230包括安装座232、移动座233和顶出件231,移动座233及顶出件231通过安装座232可伸缩安装在接液孔。在一些实施方式汇中,顶出件231与移动座233抵接。移动座233的形状及大小与出液孔211的形状及大小相适配,使得移动座233能够始终保持伸出接液孔中,保证接液孔与出液孔211连接时,储液结构210通过出液孔211的水不会溢出。
在一些实施例中,接液孔设置在储液结构安装槽113上。顶出件231可伸缩安装于接液孔上。具体地,接液孔设置在储液结构安装槽113的底部。顶出件231随着储液结构210进入储液结构安装槽113的过程中逐渐缩回接液孔中,直至接液孔的位置与出液孔211的位置相对应时,顶出件231伸出接液孔并将出液孔211中的阻液件221顶出,使得出液孔211与导液流道235连通,以便储液结构210能够经出液孔211、导液流道235向清洁机器人20供给液体。在至少部分储液结构210从储液结构安装槽113取出时,顶出件231缩回接液孔中,使得阻液件221伸出出液孔211,避免出液结构内的液体通过出液孔211流出。在储液结构210完全从储液结构安装槽113中取出时,顶出件231复位,即顶出件231伸出接液孔。如此不仅能够对导液流道235进行保护,避免外界的灰尘等进入导液流道235而造成导液流道235堵塞,同时又可以将出液孔211中的阻水件顶出,使得导液流道235与出液孔211连通。
在一些实施例中,移动座233的上端设有第一斜面,储液结构210在与移动座233相对的位置上设有与第一斜面配合的第二斜面。具体地,当储液结构210安装于座体110上后,第一斜面与第二斜面配合。
具体地,第一斜面的倾斜方向背离储液结构安装槽113的开口方向,第二斜面的倾斜方向朝向储液结构安装槽113的开口方向。在储液结构210放入储液结构安装槽113的过程中,移动座233在第二斜面的作用下逐渐缩回接液孔中,当移动座233从第二斜面进入出液孔211后,即出液孔211的位置与接液孔的位置对应,移动座233伸出接液孔并进入出液孔211中,移动座233中的顶出件231将出液孔211中的阻液件221顶出,使得导液流道235与出液孔211连通。
在储液结构210从储液结构安装槽113取出的过程中,移动座233在第一斜面的作用下逐渐缩回接液孔中。当移动座233从出液孔211进入第二斜面后,移动座233逐渐伸出接液孔,直至储液结构210完全从储液结构安装槽113中取出,移动座233完成伸出接液孔。
在一些实施例中,当储液结构210安装于座体110上时,第一斜面与第二斜面之间的距离以逐渐减小的方式从上端向下端延伸。在一些实施例中,当储液结构210安装于座体110上时,第一斜面与第二斜面形成V字形结构。
在一些实施例中,顶出机构230还包括弹性件234,弹性件234的一端与座体110抵接,弹性件234的另一端与顶出件231抵接并使得移动座233背离弹性件234的一端抵接在安装座232上,从而可以使得移动座233能够带动顶出件231伸缩于接液孔中。
在一些实施例中,顶出件231伸出座体110的长度小于移动座233伸出座体110的长度,以使得座体110进入出液孔211后,顶出件231才将出液孔211中的阻液件221顶出,避免顶出结构内的水从出液孔211溢出。
在一些实施例中,阻液机构220还包括复位件222和锁固件223,阻液件221和复位件222通过锁固件223安装在储液结构210中,以使得阻液件221能够在复位件222的作用下在初始位置和出液位置之间切换。
具体地,阻液件221和复位件222通过锁固件223安装在储液结构210上,使得阻液机构220能够在复位件222的作用下始终处于密封状态,在顶出件231将阻液件221顶出时,阻液机构220才解除密封状态,当顶出件231不再向阻液件221施加顶出力时,阻液件221在复位件222的作用下恢复密封状态。
在一些实施例中,储液结构210呈扇形结构,储液结构安装槽113设置在座体110的周侧上。储液结构安装槽113的形状及大小与储液结构210的形状及大小相适配,结构简单,方便加工,而且也不影响座体110的外观结构。
在一些实施例中,储液结构210和储液结构安装槽113的其中一个设有卡合结构212,储液结构210和储液结构安装槽113的另一个设有配合结构,卡合结构212与配合结构配合连接以使得储液结构210和座体110可拆卸连接。当储液结构210安装在储液结构安装槽113上后,卡合结构212能够刚好卡接在配合结构中,从而对储液结构210实现固定。
卡合结构212和配合结构可以为任意合适的卡扣配合结构,示例性地,卡合结构212和配合结构中的其中一者为卡扣,另外一者为卡槽。
在一些实施例中,储液结构210上设有凹槽213,以便用户能够通过凹槽213将储液结构210从储液结构安装槽113取出。
在一些实施例中,维护设备10还包括驱动组件300。驱动组件300设于维护本体100上,并与盖体120传动连接。
在一些实施例中,维护设备10还包括手势检测装置400和控制器,控制器与手势检测装置400通信连接,控制器电连接于驱动组件300。手势检测装置400设于维护本体100上,用于检测用户的控制手势信息。控制器用于根据控制手势信息生成盖体120控制指令,并根据盖体120控制指令控制驱动组件300动作,以使盖体120打开或盖合。在该实施例中,用户能够通过手势检测装置400所检测到的控制手势信息,控制盖体120翻转以使得盖体120盖合或打开敞开口112,无需用户手动接触操作盖体120或接触开关按键,结构简单、操作方便,并提高了用户的体验度。
在一些实施例中,维护设备10还包括充电组件,电连接于控制器。充电组件设于维护本体100上,用于向清洁机器人20充电。具体地,控制器能够控制充电组件向清洁机器人20充电。
在一些实施方式中,控制器还电连接于液体检测装置和集尘体检测装置。
在一些实施例中,手势检测装置400包括红外检测装置、TOF检测装置、摄像头、结构光检测装置中的至少一种。可以理解地,手势检测装置400可以包括一个、两个或者更多手势检测传感器,在此不作限定。
具体地,控制手势信息可以包括手部移动方向、手部移动次数、手部姿态等中的至少一种。手部移动方向可以包括左右移动方向、上下移动方向等中的至少一种。手部姿态包括握拳、手掌打开、V型手势、OK手势等中的至少一种。
在一些实施例中,驱动组件300包括动力件310和传动机构320。动力件310设于座体110上,且动力件310与控制器电连接。动力件310通过传动机构320与盖体120传动连接用于使盖体120打开或盖合。具体地,控制器根据手势检测装置400检测到的手势控制信息控制动力件310工作,动力件310驱动传动机构320带动盖体120转动,以使盖体120打开或盖合。
在一些实施例中,手势检测装置400设于盖体120上;和/或,手势检测装置400设置于座体110的侧部或上部。
示例性地,手势检测装置400的检测方向朝上。当盖体120需要打开或关闭时,用户的手部可以从盖体120背离座体110的一侧移动或动作。示例性地,当盖体120需要打开时,在手势检测装置400的检测范围,用户的手部从上往下运动,手势检测装置400检测到信号后控制盖体120打开。当盖体120需要关闭时,在手势检测装置400的检测范围,用户的手部从左到右运动,手势检测装置400检测到信号后控制盖体120打开。打开或关闭盖体120的操作简单,无需用户收到接触操作盖体120或接触开关按键,结构简单,用户的体验度高。
在一些实施例中,传动机构320包括主动轮321和从动轮322。主动轮321与动力件310的输出端传动连接。从动轮322设于盖体120上,且从动轮322与主动轮321传动连接。示例性地,主动轮321和从动轮322均为皮带轮或链轮,主动轮321通过皮带或链条与从动轮322传动连接;或者主动轮321和从动轮322均为齿轮,主动轮321与从动轮322啮合连接;或者主动轮321通过其他齿轮组与从动轮322传动连接等等。
在一些实施方式中,主动轮321与从动轮322啮合连接,从而使得维护设备10的结构更为紧凑,同时也降低了维护设备10的制造成本。
动力件310可以根据实际需求设计为任意合适的驱动结构,比如驱动电机。驱动电机具有输出轴,主动轮321安装在输出轴上。
在一些实施例中,盖体120包括盖合本体121、转轴部122和连接部123。盖合本体121与敞开口112配合。转轴部122与从动轮322连接。连接部123连接于盖合本体121和转轴部122。具体地,座体110上设有转轴孔1141,转轴部122穿过转轴孔1141后与从动轮322连接,动力件310通过主动轮321与从动轮322传动连接,从而带动盖体120转动。具体地,座体110上还设有支撑台114,转轴孔1141设于支撑台114上。
在一些实施例中,从动轮322与转轴部122一体成型,以便于盖合本体121、转轴部122、连接部123和从动轮322能够通过注塑一体成型制成,进一步降低维护设备10的制造成本。
在一些实施例中,连接部123包括第一连接子部1231和第二连接子部1232。第一连接子部1231与盖合本体121连接。第二连接子部1232连接于转轴部122和第一连接子部1231。第二连接子部1232与第一连接子部1231呈夹角设置。第二连接子部1232与第一连接子部1231配合形成台阶结构。
在一些实施例中,座体110上设有动力件310安装腔115,动力件310和主动轮321安装于动力件310安装腔115内。
在一些实施例中,清洁系统还包括控制设备。控制设备用于发送操作控制指令至清洁机器人20和/或维护设备10;机操作控制指令包括注液控制指令、集尘控制指令和清洁控制指令中的至少一种。维护设备10用于在接收到清洁控制信号时,根据操作控制指令控制维护设备10对清洁机器人20进行维护操作,维护操作包括集尘操作、注液操作、充电操作、更换配件操作、清洗配件操作中的至少一种。
上述实施例提供的维护设备10,通过控制设备发送清洁控制信号来使维护设备10对清洁机器人20进行维护操作,用户无需手动给清洁机器人20进行维护工作,维护设备10可以自动对清洁机器人20进行维护,可以提高清洁机器人20的维护操作的效率,降低用户的工作量。
在一些实施例中,控制设备可以包括包括手机、平板、电视、带屏电冰箱或者以上维护设备10中的至少一种。
请参阅图15,图15是本申请的实施例提供的一种维护设备的加液提示方法的示意流程图,该维护设备用于清洁系统。所述清洁系统包括清洁机器人和维护设备。所述维护设备能够对所述清洁机器人进行维护操作。所述维护操作包括对所述清洁机器人进行注液操作、集尘操作、充电操作、更换配件操作、清洗配件操作等中的至少一种。所述维护设备包括座体、储液结构和液体检测装置,所述储液结构设于所述座体上;所述液体检测装置设于所述储液结构上。
请参阅图15,图15是本申请的实施例提供的一种清洁机器人的控制方法的示意流程图,该方法应用于清洁机器人。所述清洁系统包括上述任一实施例的维护设备、清洁机器人和控制设备,所述清洁机器人包括移动组件。
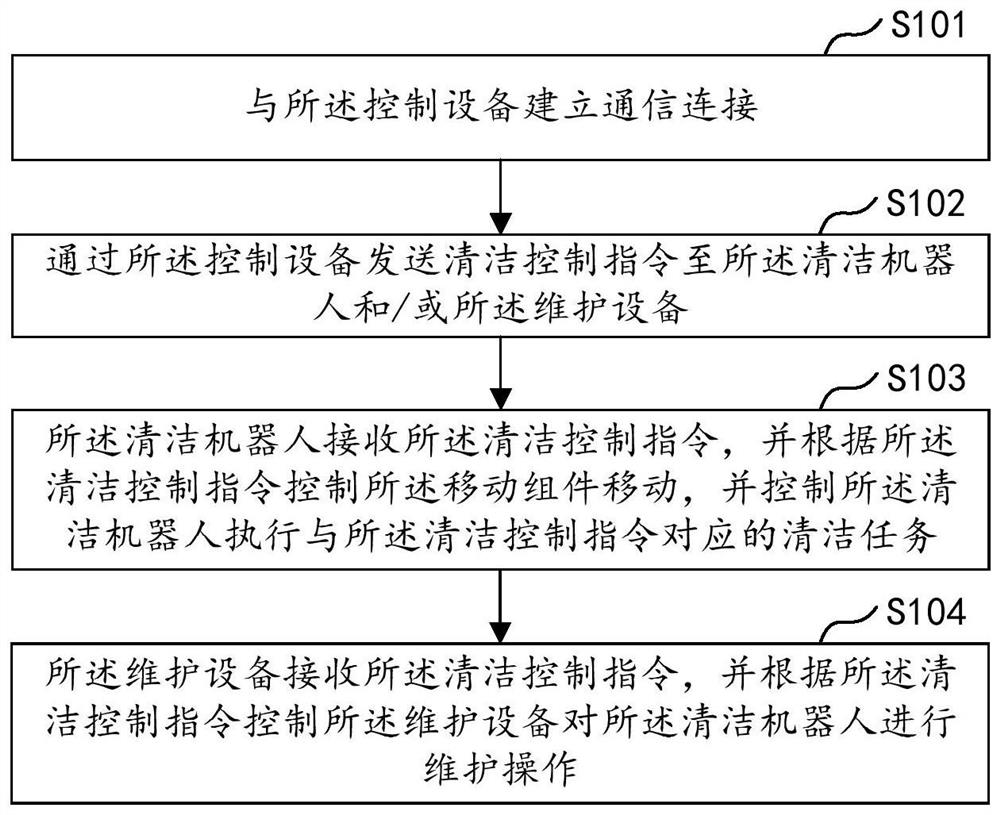
如图15所示,该清洁机器人的控制方法具体包括步骤S101至步骤S104。
S101、与所述控制设备建立通信连接。
示例性地,清洁机器人和/或维护设备通过蓝牙、WiFi、Zigbee等与控制设备通信连接。
示例性地,控制设备上安装有软件,用户可以通过软件与清洁机器人和/或维护设备建立通信连接。
示例性地,用户可以在控制设备进行控制操作,控制设备根据用户的控制操作向清洁机器人发送控制指令。
示例性地,用户可以通过按下维护设备上的按钮,触发与清洁机器人建立通信连接和/或向清洁机器人发送控制指令。
示例性地,控制设备可以根据预先设置的条件得到满足时,与清洁机器人建立通信连接和/或向清洁机器人发送控制指令。
示例性地,控制设备向清洁机器人发送操作控制指令,例如用于控制清洁机器人进行湿拖作业的操作控制指令等。
示例性地,所述操作控制指令包括注液控制指令、集尘控制指令、拖地控制指令、充电控制指令和清洁控制指令等中的至少一种。
例如,注液控制指令表示需要维护设备向清洁机器人加注液体,拖地控制指令表示需要清洁机器人加注液体和对地面进行湿拖作业,
S102、通过所述控制设备发送操作控制指令至所述清洁机器人和/或所述维护设备。
具体地,所述操作控制指令包括注液控制指令、集尘控制指令和清洁控制指令中的至少一种。
示例性地,维护设备中设置有控制模块,维护设备可以通过控制模块发送操作控制指令至清洁机器人,并通过串口将操作控制指令发送至维护设备的处理器。
其中,控制设备为用于发送操作控制指令的设备。示例性地,所述控制设备包括家电设备、移动设备或所述维护设备中的至少一种。家电设备可以是具备发送操作控制指令功能的电子设备。示例性地,家电设备可以是智能电视、智能冰箱、智能音箱等电子设备,家电设备还可以是智能手机或平板电脑等。家电设备可以通过无线通信方式与清洁机器人连接,以及通过无线通信方式与维护设备连接,示例性地,无线通信方式可以是蓝牙或无线局域网。家电设备可以根据用户的操作,通过无线通信方式发送操作控制指令至清洁机器人和维护设备。
操作控制指令为用于使维护设备和/或清洁机器人进行清洁操作的信号。维护设备和/或清洁机器人要进行清洁操作,各自都需要进行相应的清洁准备工作。
S103、所述清洁机器人接收所述操作控制指令,并根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行与所述操作控制指令对应的操作任务。
在一些实施例中,所述操作控制指令包括注液控制指令,所述清洁机器人还包括液体容纳部,所述维护设备包括加液组件;所述根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行操作任务,包括:根据所述注液控制指令控制所述移动组件移动,以使所述清洁机器人移动至所述维护设备,以便所述加液组件的储液结构向所述液体容纳部加注清洗液体。
具体地,清洁机器人中设置有液体容纳部。清洁机器人在收到注液控制指令后,移动组件会移动,以使得清洁机器人移动至维护设备的相应位置,即返回至维护设备的注液工位处。维护设备在收到注液控制指令时,维护设备的储液结构会向清洁机器人的液体容纳部注入液体。清洁机器人还包括拖地组件,注液完成后,清洁机器人中的液体容纳部内的液体可以流向拖地组件,使得拖地组件例如拖布变湿等。示例性地,拖地组件设置在清洁机器人的底部。清洁机器人在地面移动时,拖地组件上的拖布接触地面,从而可以对地面进行湿拖。
其中,维护设备和/或清洁机器人接收到操作控制指令后要进行清洁操作或执行相应的操作任务,各自都需要进行相应的清洁准备工作。清洁机器人上设置有被维护接口,维护设备上设置有主维护接口,在清洁机器人的被维护接口和所述维护设备的主维护接口对应设置后,维护设备才可以对清洁机器人进行维护。根据所述操作控制指令控制所述清洁机器人的被维护接口和所述维护设备的主维护接口对应设置,包括:开启清洁机器人的被维护接口,以及将被维护接口和主维护接口位置对应。
示例性地,如果操作控制指令包括注液控制指令,被维护接口包括设置在液体容纳部上的导液开口。主维护接口包括维护设备上的接液孔和出液孔。所述根据所述操作控制指令控制所述维护设备对所述清洁机器人进行维护操作,包括:当所述清洁机器人的导液开口与所述维护设备的接液孔对应设置时,根据所述注液控制指令,控制所述维护设备通过所述注液接口和所述导液开口,将所述储液结构内的至少部分清洗液体加注至所述液体容纳部。
具体地,可以将清洁机器人的导液开口打开,并与维护设备的接液孔位置对应,以使维护设备的储液机构经出液孔输出液体时,可以通过接液孔、导液开口流入液体容纳部。
如果操作控制指令包括集尘控制指令。所述清洁机器人还包括容尘组件,所述维护设备还包括集尘组件;所述根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行操作任务,包括:根据所述集尘控制指令控制所述移动组件移动,以使所述清洁机器人移动至所述维护设备,以将所述容尘组件中的至少部分物质抽取至所述集尘组件。
被维护接口包括设置在容尘组件上的被集尘开口,所主维护接口包括主集尘开口;可以将清洁机器人的被集尘开口打开,并与维护设备的主集尘开口位置对应,以使维护设备进行集尘操作时,容尘组件中的物质或脏物或灰尘可以通过被集尘接口和主集尘接口被抽取至集尘组件的集尘体中。
在一些实施例中,所述操作控制指令包括清洁控制指令,所述清洁机器人还包括拖地组件。所述根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行操作任务,包括:根据所述清洁控制指令控制所述移动组件移动,并控制所述拖地组件执行清扫任务。
具体地,清洁控制指令表示需要清洁机器人加注清洗液体和对地面进行湿拖作业,以及对地面的灰尘或脏物进行收集作业即吸尘作业。清洁机器人在收到该清洁控制指令时,控制拖地组件进行吸尘作业和湿拖作业,从而完成清扫任务。
清洁机器人在地面移动时,拖地组件上的拖布接触地面,从而可以对地面进行湿拖。
在本实施例中,清洁机器人可以是处于执行操作任务期间接收到操作控制指令,所以清洁机器人需要移动到维护设备进行维护。
清洁机器人上还设置有移动组件,移动组件用于在地面移动,以使清洁机器人发生移动,移动组件可以包括电机和轮子。通过移动组件的移动,清洁机器人可以在地面运动,例如可以按照预先设计的清洁路线运动。清洁机器人在地面运动时,清洁机器人可以进行吸尘和拖地的操作。
在一些实施例中,在接收到操作控制指令时,可以控制清洁机器人的移动组件进行移动,以使清洁机器人移动至维护设备,并根据所述操作控制指令控制所述清洁机器人的被维护接口和所述维护设备的主维护接口对应设置。示例性地,如果操作控制指令包括集尘控制指令,则控制清洁机器人移动至维护设备的维护预设位置,移动到维护预设位置后被集尘开口和维护设备的主维护开口就会位置对应,进而维护设备可以对清洁机器人进行集尘操作。
S104、所述维护设备接收所述操作控制指令,并根据所述操作控制指令控制所述维护设备对所述清洁机器人进行维护操作。
具体地,所述维护操作包括集尘操作、注液操作、充电操作、更换配件操作、清洗配件操作中的至少一种。维护操作为维护设备向清洁机器人的清洁空间进行整理和补充的操作,以使清洁机器人持续执行清洁工作。维护操作包括集尘操作、注液操作、充电操作、更换配件操作、清洗配件操作等中的至少一种。示例性地,集尘操作为将清洁机器人的容尘组件中的物质取出。充电操作为对清洁机器人中的蓄电池进行充电。注液操作为维护设备向清洁机器人的液体容纳部注入液体。
示例性地,所述所述维护设备接收所述操作控制指令,并根据所述操作控制指令控制所述维护设备对所述清洁机器人进行维护操作,包括:当维护设备接收到操作控制指令后,维护设备在检测到清洁机器人移动到维护预设位置时,开启维护设备的主维接口,以使所述主维护接口和所述被维护接口位置对应;对所述清洁机器人进行维护操作。
示例性地,所述操作控制指令包括注液控制指令。被维护接口包括设置在液体容纳部上的导液开口。主维护接口包括维护设备上的接液孔和出液孔。可以在清洁机器人的导液开口和接液孔位置对应时,打开维护设备的接液孔和出液孔,以使维护设备的出液孔输出液体时,可以通过接液孔、导液开口流入液体容纳部。
示例性地,所述操作控制指令包括集尘控制指令。所述清洁机器人还包括容尘组件,所述维护设备还包括集尘组件。被维护接口包括设置在容尘组件上的被集尘开口,所主维护接口包括主集尘开口;可以在清洁机器人的被集尘开口与维护设备的主集尘开口位置对应时,打开维护设备的主集尘开口,以使维护设备进行集尘操作时,容尘组件中的物质或脏物或灰尘可以通过被集尘接口和主集尘接口被抽取至集尘组件的集尘体中。
上述实施例提供的清洁机器人的控制方法,通过所述控制设备发送操作控制指令至所述清洁机器人和/或所述维护设备;所述清洁机器人接收所述操作控制指令,并根据所述操作控制指令控制所述移动组件移动,并控制所述清洁机器人执行与所述操作控制指令对应的操作任务;所述维护设备接收所述操作控制指令,并根据所述操作控制指令控制所述维护设备对所述清洁机器人进行维护操作,用户无需手动给清洁机器人进行维护工作,维护设备可以自动对清洁机器人进行维护,可以提高清洁机器人的维护操作的效率,降低用户的工作量。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以权利要求的保护范围为准。
- 清洁机器人的控制方法、清洁机器人、清洁系统
- 一种清洁机器人的控制方法、清洁机器人及物联网系统