电动移动设备以及设施内的系统
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及电动移动设备以及设施内的系统。
背景技术
作为这种设施内的系统,已知有如下系统:使用多个电动移动设备,利用者通过手动驾驶使所述多个电动移动设备中的一个电动移动设备在设施内移动,如果利用者对所述电动移动设备的利用结束,则所述电动移动设备通过自动驾驶移动到待机场所。例如参照专利文献1。
此外,已知使用了能够自动驾驶的单人乘坐移动设备的服务。例如参照专利文献2~6。
专利文献1:日本专利公开公报特开2019-144167号
专利文献2:日本专利公开公报特开2003-024390号
专利文献3:日本专利公开公报特开2018-160270号
专利文献4:日本专利公开公报特开2018-169787号
专利文献5:日本专利公开公报特开2016-027456号
专利文献6:日本专利公开公报特开平11-231935号
虽然存在专利文献1所公开的服务的概念,但是利用电动移动设备的利用者的年龄、身体状态、语言、常识等是各种各样的。因此,实际上难以稳定地提供这样的服务。
例如,在提供单人乘坐等小型电动移动设备的共享服务的情况下,利用者的体格、随身行李等相互大不相同。此外,在这样的共享服务中,大多在接收到比较短的说明之后操作电动移动设备。
仅在这样的说明中,有时利用者的身体的一部分、衣服、行李等侵入到电动移动设备的传感器的检测范围内,由此对传感器的感测造成影响。该现象对使用了传感器的障碍物的识别精度造成影响,也对自动停止、自动行驶的精度造成影响。另一方面,例如根据利用者的身高、利用者的姿势等,有时利用者的膝盖等身体的一部分无论如何都会侵入到传感器的检测范围内。特别是在利用者的腰弯曲而利用者的腿长的情况下,有时利用者的膝盖比单人乘坐的小型电动移动设备的前端更向前方突出。此外,有时利用者的衣服无论如何都会侵入到传感器的检测范围内。为了稳定地提供共享服务,优选在传感器的检测范围中的利用者的前方的检测范围设定检测取消范围,能够根据利用者的身高等变更检测取消范围的前后方向的范围。但是,在这种情况下,根据利用者的衣服的形状,有时衣服的下端被电动移动设备的前轮卷入的可能性变高。
发明内容
鉴于上述情况,期望能够稳定地提供共享服务的电动移动设备、设施内的系统以及租赁站。
本发明的第一方式是利用者就座而乘坐的电动移动设备,具备:移动设备主体,具有车轮、驱动所述车轮的驱动装置、以及供所述利用者就座的座椅;以及传感器,设置于所述移动设备主体,所述移动设备主体具有控制装置,所述控制装置使用所述传感器的检测数据来控制所述驱动装置,以进行自动驾驶和自动停止中的至少一方,所述控制装置构成为,在所述传感器的检测数据中,能够在就座于所述座椅的所述利用者的前方的范围设定检测取消范围,所述检测取消范围是所述利用者的身体的一部分、衣服的一部分或者作为携带物品的一部分可能存在的范围,所述电动移动设备还具备下侧传感器,所述下侧传感器从所述利用者的脚承载面的下方或者所述利用者的脚承载部的前端部,检测所述检测取消范围的下侧范围的回避对象,当通过所述下侧传感器在所述下侧范围内检测到所述回避对象时,所述控制装置控制所述驱动装置以进行回避动作。
本发明的第二方式是利用者乘坐的电动移动设备,具备:移动设备主体,具有车轮和驱动所述车轮的驱动装置;以及传感器,设置于所述移动设备主体,所述移动设备主体具有控制装置,所述控制装置使用所述传感器的检测数据来控制所述驱动装置,以进行自动驾驶和自动停止中的至少一方,所述控制装置基于所述传感器的所述检测数据,进行在该电动移动设备行驶中所述利用者的身体的一部分、所述利用者所持有的携带物品、所述利用者随身的物品或者放置于该电动移动设备的行李放置部的行李进入到所述传感器的检测范围内的侵入状态的判断处理,所述控制装置在判断为是所述侵入状态时,进行使用了设置于该电动移动设备的通知装置的通知处理和基于所述驱动装置的控制的该电动移动设备的行驶状态的变更处理中的至少一方。
本发明的第三方式是设施内的系统,具备:所述电动移动设备;管理计算机,接收所述电动移动设备的车身信息;以及显示装置,显示接收到的所述车身信息,所述管理计算机针对所述电动移动设备,接收表示是所述侵入状态或者由于是所述侵入状态而进行了所述电动移动设备的所述行驶状态的变更的信息,所述显示装置基于所述信息,显示所述电动移动设备是所述侵入状态或者进行了所述行驶状态的变更。
附图说明
图1是本发明的一个实施方式的电动移动设备的立体图。
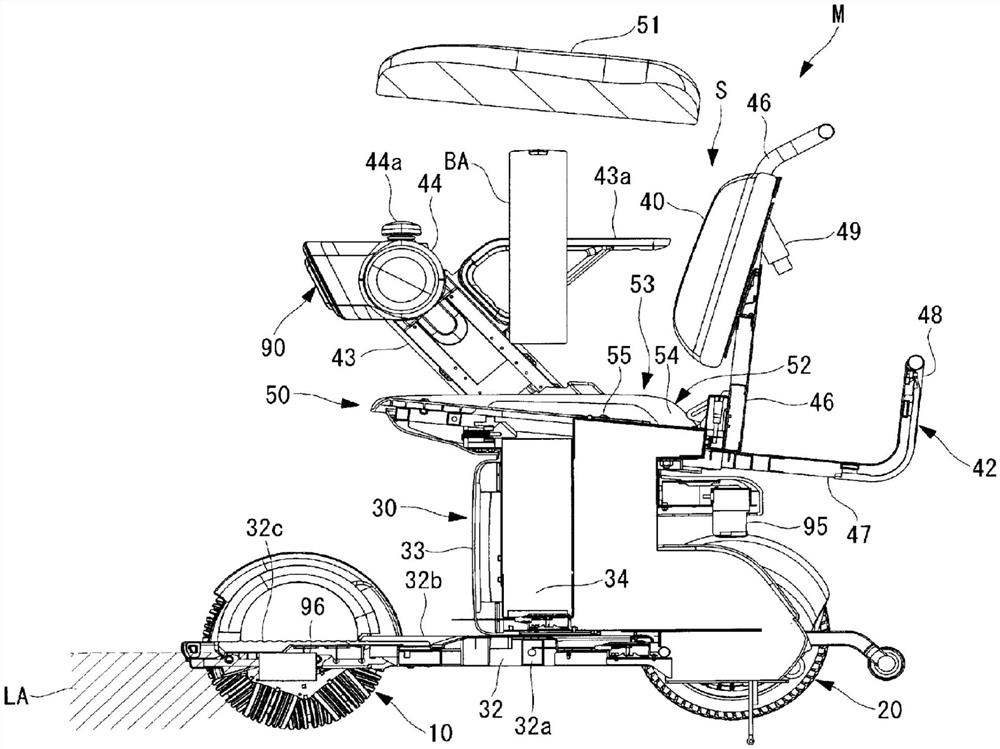
图2是本实施方式的电动移动设备的局部分解剖视图。
图3是本实施方式的电动移动设备的拆下了座椅单元、罩部等的状态的仰视图。
图4是本实施方式的电动移动设备的俯视图。
图5是本实施方式的航站楼T内的系统的概略图。
图6是本实施方式的电动移动设备的控制单元的框图。
图7是本实施方式的电动移动设备的座椅单元的立体图。
图8是本实施方式中使用的管理计算机的框图。
图9是表示本实施方式的管理数据的一例的表。
图10是本实施方式的电动移动设备的俯视图。
图11是表示本实施方式的电动移动设备的控制装置的处理的例子的流程图。
图12是表示本实施方式的电动移动设备的显示装置的显示例的图。
图13是表示本实施方式的电动移动设备的显示装置的显示例的图。
图14是本实施方式的第一变形例的电动移动设备的剖视图。
图15是本实施方式的第二变形例的电动移动设备的剖视图。
图16是本实施方式的第三变形例的电动移动设备的剖视图。
图17是本实施方式的第四变形例的电动移动设备的立体图。
图18是本实施方式的第五变形例的电动移动设备的侧视图。
图19是本实施方式的电动移动设备的俯视图。
图20是本实施方式的电动移动设备的俯视图。
图21是本实施方式的电动移动设备的局部分解剖视图。
图22是本实施方式的电动移动设备的局部分解剖视图。
具体实施方式
以下,参照附图对本发明一个实施方式的机场(设施)中的系统进行说明。
如图5所示,该系统具备配置在机场的航站楼T内的多台电动移动设备M、以及管理多个电动移动设备M的管理计算机100。管理计算机100也可以不配置在机场内。
首先,对本实施方式的电动移动设备M进行简单说明。另外,在该系统中,也可以使用与本实施方式的电动移动设备M不同的电动移动设备。
如图1~图4所示,该电动移动设备M具备具有一对前轮(车轮)10和一对后轮(车轮)20的移动设备主体30。此外,移动设备主体30具备座椅单元(座椅)S。除了前轮10和后轮20以外,还可以设置车轮,前轮10和后轮20的数量也可以是上述以外的数量。此外,也可以没有前轮10和后轮20中的一方。本实施方式的电动移动设备M是一个利用者U就座于座椅单元S而乘坐的电动轮椅的一种。
移动设备主体30具有用于驱动一对前轮10和一对后轮20中的至少一方的马达(驱动装置)MT。
在本实施方式的说明中,图3和图4所示的车辆前后方向在以下的说明中有时被称为前后方向,图3和图4所示的车辆宽度方向在以下的说明中有时被称为宽度方向或左右方向。另外,车辆前后方向与电动移动设备M和移动设备主体30的前后方向一致,车辆宽度方向与电动移动设备M和移动设备主体30的宽度方向一致。
在本实施方式中,如图3所示,一对后轮20分别与马达MT连接,各马达MT驱动对应的后轮20。各马达MT的驱动力可以通过动力传递单元传递到对应的前轮10。动力传递部件是带、齿轮等。
各前轮10具备安装于车轴11的轮毂14、以及由轮毂14支承的多个滚子支轴(未图示),多个滚子13分别被滚子支轴支承为能够旋转。另外,轮毂14可以使用轴承等安装于车轴11,轮毂14也可以使用缓冲部件、中间部件等安装于车轴11。
各滚子13绕对应的滚子支轴的轴线旋转。即,各前轮10的外周面由多个滚子13形成,各前轮10是相对于行驶面在全方向上移动的全方向车轮。另外,在图3和图4中,省略了各滚子13的槽的图示。
在本实施方式中,各后轮20具有:未图示的车轴;安装于车轴的轮毂21;以及外周部件22,设置于轮毂21的外周侧,使用外周面具有橡胶状弹性的材料而形成,但是也可以与前轮10同样地使用全方向车轮。在这种情况下,前轮10不是全方向车轮而是通常的车轮。后轮20的车轴可以与马达MT的主轴共用。
移动设备主体30的结构能够适当变更。本实施方式的移动设备主体30具有沿着地面延伸的基座部32、以及从基座部32的后端侧或中央部向上方延伸的座椅支承部33。在座椅支承部33的上端侧安装有座椅单元S。
本实施方式的基座部32具有至少部分地覆盖图3所示的金属制的基座框架32a的塑料制的罩部32b。罩部32b用作承载就座于座椅单元S的利用者U的脚的部分、放置行李的部分等。
在本实施方式中,座椅单元S具有靠背部40和座面部50。靠背部40从座面部50的后端向上方延伸。座面部50的坐垫51能够拆下,如果拆下坐垫51,则座椅支承部33的上表面和/或座面部50的下部结构52露出。
在座椅支承部33形成有在上下方向上延伸的电池收纳部34,在上下方向上具有长边的电池BA收纳于电池收纳部34。
如图2所示,在座椅支承部33的上端部设置有就座传感器53作为座面部50的下部结构52的一部分。本实施方式的就座传感器53具有支承于座椅支承部33的上端部的挠性部件54、以及配置在挠性部件54下方的检测设备55。检测设备55是开关、压力传感器等。在本实施方式中,检测设备55是开关。另外,检测设备55也可以是安装于挠性部件54的挠曲传感器。这样,检测设备55只要是能够检测挠性部件54的挠曲的设备即可。另外,就座传感器53可以是设置于坐垫51的下方、下表面、内部等的检测设备55。在这种情况下,不需要设置挠性部件54。此外,作为就座传感器53,也可以使用检测利用者U乘坐在坐垫50上的其他方式的公知的传感器。
在本实施方式中,当利用者U乘坐在坐垫51上时,通过挠性部件54的一部分、例如中央侧向下方弹性变形而按压检测设备55,通过按压检测设备55,规定的信号(电流)等从检测设备55发送到后述的控制装置80。即,通过控制装置80识别利用者U乘坐在座面部51上。
座椅单元S具有右侧的控制臂43和左侧的控制臂43。
在各控制臂43的上表面固定有扶手43a。例如,利用者U(驾驶者)将双臂分别放置在一对控制臂43的扶手43a上。此外,利用者U将双手分别放置在一对控制臂43的上端。在本实施方式中,设置有控制臂43和扶手43a的双方,但是也可以仅设置控制臂43或扶手43a。在这种情况下,利用者U能够将手臂和手中的至少一方放置在控制臂43上,或者将手臂和手中的至少一方放置在扶手43a上。
在右侧的控制臂43或扶手43a的上端设置有具有操作部(操纵杆)44a的控制器44。在未施加力的状态下,通过配置在控制器44内的施力部件(未图示),操作部44a配置在中立位置。
另外,控制器44也可以从移动设备主体30分离。在这种情况下,控制器44例如可以是利用者的平板计算机、类似于游戏用控制器的控制器等。在平板计算机的情况下,不设置操作部44a,利用者使用平板计算机的画面的触摸屏功能,输入电动移动设备M的行驶方向、行驶速度等。在控制器44从移动设备主体30分离的情况下,也可以不是利用者U而是其他人操作利用者U所乘坐的电动移动设备M的行驶。
与操作部44a的位移方向和位移量对应的信号从控制器44发送到后述的控制单元60,控制单元60根据接收到的信号来控制各马达MT。
在左侧的控制臂43或扶手43a的上端设置有用于进行与电动移动设备相关的各种设定的设定部(输入装置)45。作为各种设定的例子,具有最高速度的设定、驾驶模式的设定、电动移动设备的锁定的设定。在设定部45设置有多个操作按钮、显示部等。
如图1所示,电动移动设备M具备从左侧的控制臂43的上端面向上方突出的显示装置200。显示装置200通过从左侧的控制臂43的上端面向上方延伸的支承部件210支承于左侧的控制臂43。另外,在图4中省略了显示装置200的图示。
从后述的控制装置80向显示装置200通过有线或无线方式发送信息,显示装置200显示接收到的信息。该信息例如包含:电动移动设备M的行驶速度的信息、与电池BA的状态相关的信息、由立体相机(第一传感器)90等传感器检测出的障碍物的位置的信息、该障碍物是否成为行驶的障碍的判断结果的信息、地图信息以及行驶路径的信息等。此外,显示装置200例如具备触摸屏功能等的输入单元,输入到显示装置200的信息被发送到控制装置80。
另外,显示装置200具备具有处理器、存储装置等的控制装置,该控制装置可以承担控制装置80的功能的一部分或全部。此外,显示装置200可以能够拆装地安装于支承部件210。
如图6所示,控制单元60具有驱动各马达MT的马达驱动器70以及控制装置80。
马达驱动器70与电池BA连接。此外,马达驱动器70也与各马达MT连接,马达驱动器70向各马达MT供给驱动电力。
如图6所示,控制装置80具有:CPU等处理器81、具有非易失性存储器、ROM、RAM等的存储装置82、以及通过无线通信和有线通信进行信息收发的收发部83。在存储装置82中存储有用于控制电动移动设备M的行驶控制程序82a。处理器81基于行驶控制程序82a进行动作,基于来自控制器44和设定部45的信号,将用于驱动各马达MT的驱动信号发送到马达驱动器70。
作为三维相机的立体相机(传感器)90分别安装于右侧的控制臂43的上端侧和左侧的控制臂43的上端侧。在未设置控制臂43的情况下,可以在扶手43a的前端侧设置立体相机90。如图7所示,各立体相机90具备一对镜头单元91、以及支承一对镜头单元91的相机主体92。另外,在图7中,为了表示立体相机90的内部结构而拆下罩,还概略性地描绘了座椅单元S等。
在相机主体92的内部设置有一对摄像元件93(图6),一对摄像元件93分别与一对镜头单元91对应。各摄像元件93是CMOS传感器等已知的传感器。各摄像元件93与控制装置80连接。作为一例,各立体相机90的检测范围(第一侵入检测范围)DA1是电动移动设备的前方和前轮10的宽度方向外侧(图4)。
移动设备主体30具有作为行李架的行李放置部42,行李放置部42设置在移动设备主体30中的后端部或座椅单元S的背面侧。在本实施方式中,如图1和图2所示,行李放置部42由移动设备主体30的后端部和座椅单元S的背面支承。行李放置部42具有沿靠背部40在上下方向上延伸的一对框架46。一对框架46也进行靠背部40的支承。该结构在使电动移动设备在前后方向上紧凑方面是有用的。
行李放置部42具有:一对下面框架47,从框架46的下端分别向车辆后方延伸;以及背面框架48,相互连接一对下面框架47,从一对下面框架47向上方延伸。此外,行李放置部42具有:下面板47a,由一对下面框架47支承;以及背面板48a,从下面板47a的后端延伸到背面框架48的上端的附近。
一对下面框架47、一对背面框架48和下面板47a构成行李放置部42的底面部和背面部,因此虽然行李放置部42自身小,但是即使是机内携带用的手提箱等稍大的行李也能够稳定地放置于行李放置部42。
如图2所示,在移动设备主体30中的座椅支承部33或者座椅单元S的后端部或行李放置部42的下方安装有作为第二传感器的LiDAR(Light Detection and Ranging或LaserImaging Detection and Ranging)95。在本实施方式中,LiDAR95遍及图4的检测范围(第二侵入检测范围)DA2扫描激光,LiDAR95检测碰到物体而弹回的激光。控制装置80使用该检测结果(检测数据),检测作为电动移动设备的宽度方向外侧和后方的检测范围DA2的障碍物。障碍物例如是人、动物、植物、人的衣服、人的携带物品。障碍物例如是墙壁、比较大的物体、台阶等。在其他例子中,LiDAR95也可以检测后轮20有可能落下或嵌入的台阶、孔、槽等障碍物。此外,通过各立体相机90遍及图4的检测范围DA1进行所述障碍物的检测。
另外,可以设置用于检测电动移动设备M的后方和侧方的障碍物的其他立体相机,也可以设置能够检测障碍物的公知的雷达、毫米波传感器等其他传感器。此外,为了检测电动移动设备的前轮10的宽度方向外侧和前方的障碍物,也可以设置LiDAR、雷达、毫米波传感器等其他传感器来代替立体相机90。
控制装置80基于存储于存储装置82的回避控制程序82b和自动驾驶程序82c而动作。控制装置80处理立体相机(第一传感器)90的视差图像(检测数据)来制作距离图像(检测数据)。然后,控制装置80在距离图像中检测所述障碍物。
控制装置80可以将在检测范围DA1、DA2内由立体相机90和LiDAR95得到的数据(检测数据)变换为二维俯视图像来进行障碍物的识别,也可以将所述数据作为三维空间内的数据处理来进行障碍物的识别。控制装置80也可以通过其他方法在检测范围DA1、DA2内识别检测出的障碍物。
控制装置80基于存储于存储装置82的自动驾驶程序82c,使用电动移动设备M所具备的GPS接收机、里程表、立体相机90、LiDAR95等的检测结果,进行公知的自身位置推定。此外,控制装置80基于自动驾驶程序82c,使用检测出的障碍物、存储于存储装置82的地图数据、自身位置推定的结果,例如能够进行从出发地到目的地的路线设定和自动驾驶。
在一个例子中,利用者U使用设置于显示装置200的输入装置201(图6)来指定去的地方(目的地),控制装置80进行从作为当前的自身位置的出发地到该目的地的路线设定和自动驾驶。输入装置201例如可以是显示装置200的触摸屏功能、设置于显示装置200的按钮。也可以使用设置于控制器44、设定部45等的按钮等输入装置来代替输入装置201。
控制装置80基于存储于存储装置82的回避控制程序82b,例如在检测范围DA1、DA2中的规定范围内检测到所述障碍物时,通过用于回避动作的控制指令来控制各马达MT和/或使通知装置动作。回避动作的例子是用于避开回避对象的各马达MT的旋转速度的降低或停止(自动停止功能)、以及用于限制电动移动设备M向回避对象侧的移动的各马达MT的控制等。回避对象是所述障碍物中的存在于相对于传感器、电动移动设备M等比规定距离(1m、几十cm等)近的距离而成为电动移动设备M的行驶的障碍的可能性高的障碍物。
该系统能够应用于各种航站楼T。作为一例,使用图5所示的航站楼T的概略图对该系统进行说明。另外,在本实施方式中,作为一例,在航站楼T的安全检查后的空间中使用电动移动设备M,但是也可以在航站楼T的其他空间中使用电动移动设备M。
在航站楼T中,作为一例,在安检区1的出口的附近设置有作为管理场所的管理站(租赁站)2,在管理站2中配置有多个电动移动设备M。此外,管理站2具有接待处3,在接待处3设置有计算机4。计算机4是笔记本计算机、平板计算机等公知的计算机。计算机4经由通信网络、通信线路等与管理计算机100连接。
如图8所示,管理计算机100具有:具有CPU、RAM等的处理器101、具有非易失性存储器、ROM等的存储装置102、显示装置103、以及通过无线通信和有线通信进行信息收发的收发部104。在存储装置102中存储有用于管理多个电动移动设备M的管理数据102a。管理数据102a是用于使计算机4的显示装置5、管理计算机100的显示装置103显示管理表的数据。
管理数据102a在一个例子中是使显示装置5、103显示图9所示的管理表的数据。图9所示的管理表是包含时间表的形式。在该管理表的多行中分别记载有多个电动移动设备M的识别信息(标识符),在各行中显示与对应的电动移动设备M相关的车身信息、利用者的使用预定(利用信息)、利用者的使用状况(利用信息)、以及记载于利用者的登机牌的航班信息等。可以认为航班信息是包含利用者的目的地的信息、以及与到该目的地的希望到达时刻相关的时刻信息等的信息。
此外,在图9中,编号1的电动移动设备M从8:00由用户A使用。将其作为所述使用状况的一例显示于图9的管理表。在图9中,编号3的电动移动设备M由用户C的使用结束,处于通过自动驾驶返回管理站2的中途。在这种情况下,作为所述使用状况的一例,在图9的管理表中显示编号3的电动移动设备M使用完成。
此外,如图9所示,在管理表中的时间表以外的区域中,作为车身信息显示电池BA的充电状态、电动移动设备M的行驶状态、安装于电动移动设备M的就座传感器53的检测状态、以及行李放置部42上的行李的检测状态等。作为行驶状态,显示通过手动驾驶行驶、通过手动驾驶停止、通过自动驾驶行驶、通过自动驾驶停止等。作为其他例子,作为行驶状态显示是手动驾驶还是自动驾驶。虽然在图9中未示出,但是在管理表中作为航班信息可以显示利用者的目的地的信息、与到该目的地的希望到达时刻相关的时刻信息等。目的地的例子是登机口编号、希望到达时刻是登机开始时刻等。
在一个例子中,如图2所示,在行李放置部42的上端部安装有至少将行李放置部42的放置面收纳在视野内的利用传感器(视觉传感器)49。作为利用传感器49可以使用二维相机、三维相机、三维距离传感器、LiDAR等。在控制装置80中存储有行李有无判定程序82d。控制装置80基于行李有无判定程序82d进行动作,使用由利用传感器49得到的图像数据,判定是否在行李放置部42上检测到行李。
另外,作为利用传感器49也可以设置物体检测传感器、负载传感器、公知的雷达传感器等其他传感器来代替视觉传感器。物体检测传感器是公知的光电传感器等,负载传感器是公知的压力传感器等。在这些情况下,控制装置80基于物体检测传感器、负载传感器、雷达传感器等的检测结果,判定是否在行李放置部42上检测到行李。然后,在图9的管理表中显示行李的检测状态。
此外,在图9的管理表中显示如图4所示那样利用者U的例如膝盖等身体的一部分进入到立体相机90的检测范围DA1内的侵入状态。此外,在图9的管理表中显示如图1所示那样放置于行李放置部42的行李B的一部分进入到LiDAR95的检测范围DA2内的侵入状态。
如上述那样构成的系统在一个例子中以如下说明的方式进行运用。
大致进行区分,在本实施方式的系统中,具有准备步骤(步骤S1)、分配步骤(步骤S2)、教育步骤(步骤S3)、行驶步骤(步骤S4)、自动返回步骤(步骤S5)和后处理步骤(步骤S6)。根据状况和要求,也可以具有部分地不进行步骤S1~S6的运用。
在步骤S1中,提供该服务的人进行电动移动设备M的准备等。
在步骤S2中,提供该服务的人或管理计算机100从希望使用电动移动设备M的利用者U接受想要使用电动移动设备M的请求和信息。步骤S2可以在步骤S1之前,也可以与步骤S1同时进行。该利用者U也可以预先使用电话等通信手段将包含使用电动移动设备M的日期时间的所述请求(使用预约)传达给提供该服务的人。在提供该服务的人接受所述信息的情况下,所述信息使用计算机4的输入装置4a(图8)等输入到计算机4和/或管理计算机100。作为所述信息的例子,具有记载于登机牌的信息、利用者U的姓名、利用者U的电话号码等。特别是接收包含记载于利用者U的登机牌的航班号、登机口和登机时间中的至少一个的航班信息。作为所述信息可以接收与利用者U的身体相关的信息、与利用者U的性別相关的信息、记载于利用者U的护照的信息等,但是优选从利用者U接收的信息较少。
另外,在步骤S2中,基于上述使用的日期时间、上述信息等,提供该服务的人或管理计算机100对利用者U分配多个电动移动设备M中的一个。此时,在管理计算机100中,所述信息与所分配的电动移动设备M相对应。
接着,在步骤S3中,提供该服务的人指导利用电动移动设备M能做的事、不能做的事、礼仪、禁止事项等,确认利用者U是否同意。
在步骤S3中,提供该服务的人通过在显示装置200、设定部45、计算机4等中进行规定的操作,在显示装置200上显示教育用的页面。
在一个例子中,显示教育用的页面的程序存储于控制装置80的存储装置82,控制装置80使显示装置200显示教育用的页面。代替于此,控制装置80或显示装置200也可以从管理计算机100等计算机接收教育用的页面,并且在显示装置200上显示接收到的教育用的页面。
另外,也可以在配置于接待处3的计算机4的显示装置5或其他计算机的显示装置上显示教育用的页面。
在教育用的页面中包含关于利用者U的膝盖等身体的一部分、利用者U所持有的携带物品、利用者U随身的物品等进入到立体相机90的检测范围DA1内的侵入状态时发生的不良情况的说明。该不良情况例如涉及对检测范围DA1中的障碍物的检测的影响。携带物品是手提包、手杖等。利用者U随身的物品例如包括裙子、披风、帽子、围巾等衣服、头盔和装饰品。此外,在教育用的页面中包含如下说明:如果在检测范围DA1内发生侵入状态,则通过显示装置200、声音产生装置300、发光部400等通知是侵入状态。
此外,在教育用页面中包含关于当行李放置部42的作为行李B的一部分的绳子等进入到LiDAR95的检测范围DA2内的侵入状态时发生的不良情况的说明。该不良情况例如涉及对检测范围DA2内的障碍物的检测的影响。行李B包括包、外套、围巾、纸袋、塑料袋、纸箱、手提箱等。此外,在教育用的页面中包含如下说明:如果在检测范围DA2内发生侵入状态,则通过显示装置200、声音产生装置300、发光部400等通知是侵入状态。
为了向利用者U指导判断为是侵入状态的范围,在一个例子中,控制装置80基于向设置于电动移动设备M的移动设备主体30的输入装置的输入,进行电动移动设备M在停止的状态下是否是所述侵入状态的停止状态判断处理。在本实施方式中,在教育用的页面中显示用于使利用者U或提供该服务的人进行该输入的指示。控制装置80基于存储于存储装置82的侵入状态判断程序82e进行该停止状态判断处理。在一个例子中,该输入装置是显示装置200中的输入装置201。
例如,如果利用者U或提供该服务的人进行了所述输入,则控制装置80进行停止状态判断处理。然后,如果是侵入状态,则控制装置80在显示装置200上显示是侵入状态,如果不是侵入状态,则在显示装置200上显示不是侵入状态。该显示是所述通知的一种方式。代替显示装置200上的显示,也可以使用设置于移动设备主体30的扬声器等声音产生装置300,表示是侵入状态和不是侵入状态。在一个例子中,从声音产生装置300输出表示是侵入状态的语音或者声音,也输出表示不是侵入状态的语音或者声音。由于表示是侵入状态和不是侵入状态,所以利用者U能够识别成为侵入状态的范围。
在控制装置80中,如图4所示,进行是侵入状态的检测的侵入检测范围AR1设定在检测范围DA1内。侵入检测范围AR1是利用者U的前方的范围且是从检测范围DA1的利用者侧的端部起的前后方向上的距离L的范围。在一个例子中,距离L为50cm以下,更优选为30cm以下。在检测范围DA2内也同样地设定有侵入检测范围。
也可以在没有向用于进行停止状态判断处理的输入装置的输入的状态下,控制装置80进行停止状态判断处理。在这种情况下,如果利用者U的膝盖、脚、衣服等配置在侵入检测范围AR1内,则控制装置80进行所述通知。在行李B的一部分侵入到检测范围DA2内的侵入检测范围内的情况下也进行相同的通知。行李放置部42配置在座椅单元S的背面侧,乘坐在座椅单元S上的利用者U难以视觉辨认行李放置部42上的行李的状态。因此,行李B侵入到检测范围DA2内的侵入检测范围内的通知对用于防止行李B的破损、行李B从行李放置部42伸出而引起的电动移动设备M的行驶上的不良情况等是有利的。
另外,在教育用的页面中也可以包含用于使利用者U的膝盖向宽度方向的外侧移动的指示。例如使用显示装置200或者声音产生装置300进行这种指示。由此,利用者U能够在电动移动设备M的利用前掌握成为侵入状态的范围。
此外,也可以在管理站(租赁站)2配置指导项目IL(图5)。指导项目IL在一个例子中记载有上述各种指导。此外,在指导项目IL中图示了电动移动设备M的检测范围DA1、DA2。指导项目IL在一个例子中由纸、塑料制的片材或板构成。提供该服务的人能够一边使利用者U观看指导项目IL一边进行上述指导。由此,利用者U能够在有限的时间内有效地理解如果成为向检测范围DA1、DA2的侵入状态,则通过电动移动设备M的通知装置进行通知、以及存在检测范围DA1、DA2。
在本实施方式中,如图10所示,控制装置80除了侵入检测范围AR1以外,还设定变更候选范围AR2、AR3。如果提供该服务的人操作设置于电动移动设备M的输入装置201,则在显示装置200上显示当前设定的侵入检测范围AR1和变更候选范围AR2、AR3。对检测范围DA2内的侵入检测范围也进行与侵入检测范围AR1同样的显示。此外,对于检测范围DA2内的侵入检测范围,以下也进行与侵入检测范围AR1同样的处理。
作为教育用的页面的一部分可以在显示装置200上显示侵入检测范围AR1和变更候选范围AR2、AR3。此外,也可以基于提供该服务的人对计算机(规定的计算机)的输入,在显示装置200上显示侵入检测范围AR1和变更候选范围AR2、AR3。通过该显示,利用者U和提供该服务的人能够容易地识别利用者U的膝盖、脚、衣服等相对于侵入检测范围AR1和变更候选范围AR2、AR3的位置。
优选的是,在显示装置200上与电动移动设备M的机身的图一起显示侵入检测范围AR1和变更候选范围AR2、AR3。更优选的是,在显示装置200上还显示立体相机90检测到的利用者U的膝盖、脚、衣服等的检测结果。
另外,在上述情况下,也可以在显示装置200上不显示变更候选范围AR2、AR3而仅显示侵入检测范围AR1。在这种情况下,利用者U和提供该服务的人也能够容易地识别利用者U的膝盖、脚、衣服等相对于侵入检测范围AR1的位置。
在显示装置200上显示侵入检测范围AR1和变更候选范围AR2、AR3之后,如果在显示装置200的输入装置201中进行选择变更候选范围AR2、AR3中的任意一个的操作,则控制装置80将侵入检测范围AR1变更为变更候选范围AR2、AR3中的所选择的一方。该结构对用于容易地进行与利用者U的体型、服装、条件等对应的设定是有用的,对用于提高利用者U的舒适性也是有用的。
另外,控制装置80也可以基于对显示装置200的输入装置201或提供该服务的人的计算机(规定的计算机)的输入,变更侵入检测范围AR1。例如,如果对输入装置201输入侵入检测范围AR1向前方的移动量,则侵入检测范围AR1的至少接近利用者U的一侧的端部基于该移动量向前方移动。该结构对用于提高利用者U的舒适性是有用的。
接着,在步骤S4中,在本实施方式中,利用者U通过操作控制器44的操作部44a使电动移动设备M行驶。代替于此,电动移动设备M也可以基于利用者U对输入装置201的操作而开始自动驾驶。在这种情况下,控制装置80以去向输入到输入装置201的目的地的方式控制马达MT,由此电动移动设备M通过自动驾驶向所述目的地行驶。
在步骤S4中,控制装置80进行判断处理,该判断处理进行利用者U的身体的一部分、利用者U的携带物品、利用者U的衣服或者放置于行李放置部42的行李B侵入到检测范围DA1内和检测范围DA2内的侵入检测范围内的侵入状态的判断。此外,控制装置80在判断为是侵入状态时进行通知处理和行驶状态的变更处理中的至少一方。
参照附图对基于这种情况的控制装置80的侵入状态判断程序82e的处理的例子进行说明。
在一个例子中,如图11所示,控制装置80开始侵入判断处理,该侵入判断处理在侵入检测范围内存在物体的侵入时进行是侵入状态的判断(步骤S4-1)。在步骤S4-1中,侵入到检测范围DA1内的侵入检测范围内的物体被视为利用者U的身体的一部分、利用者U的携带物品或利用者U的衣服,侵入到检测范围DA2内的侵入检测范围内的物体被视为放置于行李放置部42的行李B。
在步骤S4-1中,在物体以规定时间以上进入到侵入检测范围内时,进行是侵入状态的判断。规定时间例如是几秒以上。几秒是2秒、5秒等。由此,不会以无用的程度频繁地进行下述步骤S4-2的侵入应对处理。另外,在步骤S4-1中,也可以在物体进入到侵入检测范围内后立即进行是侵入状态的判断。
如果在步骤S4-1中进行是侵入状态的判断,则控制装置80进行侵入应对处理(步骤S4-2)。作为侵入应对处理,具有使用设置于电动移动设备M的通知装置进行通知的通知处理、以及基于马达MT的控制的电动移动设备M的行驶状态的变更处理。在一个例子中,在步骤S4-2中,进行通知处理和行驶状态的变更处理的双方。
通知的例子是显示装置200上的规定的显示、使用声音产生装置300的规定的声音或语音的输出、以及使用设置于移动设备主体30的发光部400的规定的发光等。在本实施方式中,如图1所示,发光部400设置在控制臂43的前端。更具体地说,发光部400设置在控制臂43的前端且上端侧。控制装置80在电动移动设备M进行未进行回避动作等的通常行驶时使发光部400以蓝、绿、白等第一色发光,在电动移动设备M进行回避动作时以黄、红等第二色发光。在所述通知时,控制装置80使发光部400以与通常行驶时和回避动作时不同的第三色发光。例如,控制装置80使发光部400以紫色发光。控制装置80也可以使发光部400以与通常行驶时和回避动作时不同的发光方式发光。例如,控制装置80可以使发光部400闪烁以用于所述通知。
作为在显示装置200上的规定的显示,控制装置80在显示装置200上进行图12、图13等所示的显示。图12在检测范围DA1内的侵入检测范围内判断为侵入状态(第一侵入状态)的情况下显示,图13在检测范围DA2内的侵入检测范围内判断为侵入状态(第二侵入状态)的情况下显示。通过以上述方式针对每个传感器改变显示,利用者U容易掌握状况,这关系到早期的状况改善。在本实施方式中,图12作为第一通知发挥功能,图13作为第二通知发挥功能,但是也可以变更第一通知和第二通知的声音或语音。
此外,如图13所示,在通知是侵入状态时,可以在显示装置200上显示要求利用者U的操作的按钮202。通过操作该按钮202,控制装置80判断为利用者U识别出侵入状态。
行驶状态的变更的例子是使电动移动设备M停止、使电动移动设备M成为减速行驶状态、以及在使电动移动设备M成为减速行驶规定时间的状态后停止等。
例如,控制装置80通过使电动移动设备M的最高行驶速度为4km/h以下,使电动移动设备M成为减速行驶状态。更优选使最高行驶速度为3.5km/h以下,进一步优选为2km/h以下。控制装置80也可以通过将马达MT的旋转速度相对于控制器44的操作部44a的操作量降低规定的比率,使电动移动设备M成为减速行驶状态。在这些情况下,即使大幅度地对操作部44a进行操作,电动移动设备M也不会高速移动。该结构对用于确保电动移动设备M的周围和利用者U的安全是有利的。
在一个例子中,控制装置80在步骤S4-2中进行了通知之后进行行驶状态的变更。即,控制装置80在从进行了通知起几秒后进行行驶状态的变更。由此,利用者U能够具有电动移动设备M停止或减速前的准备时间。
在其他例子中,在步骤S4-2中进行通知处理和行驶状态的变更处理中的一方。
步骤S4-2能够按照以下各种处理例来执行。
在第一处理例中,在电动移动设备M通过操作部44a的操作而行驶时,如果在步骤S4-1中判断为是侵入状态,则控制装置80在步骤S4-2中进行所述通知,但是维持基于操作部44a的操作的该电动移动设备M的行驶。在这种情况下,利用者U可以在电动移动设备M行驶的状态下解除向检测范围DA1、DA2的侵入状态。该处理对用于实现提高利用者U的舒适度是有用的。
在第二处理例中,在电动移动设备M通过操作部44a的操作而行驶时,如果在步骤S4-1中判断为是侵入状态,则控制装置80在步骤S4-2中进行所述通知,并且使基于操作部44a的操作的该电动移动设备M的行驶减速并维持。在这种情况下,利用者U也可以在电动移动设备M减速行驶的状态下,解除向检测范围DA1、DA2的侵入状态。该处理对用于实现提高利用者U的舒适度是有用的,此外,对用于确保电动移动设备M的周围和利用者U的安全是有用的。
在第三处理例中,如上所述在电动移动设备M通过自动驾驶而行驶时,如果在步骤S4-1中判断为是侵入状态,则控制装置80在步骤S4-2中进行所述通知,但是维持基于操作部44a的操作的该电动移动设备M的行驶。在这种情况下,与手动驾驶时相比,利用者U能够花费更多的时间和注意来解除侵入状态。因此,该处理对用于实现提高自动驾驶中的利用者U的舒适度是有利的。
在第二处理例中,如上所述在电动移动设备M通过自动驾驶而行驶时,如果在步骤S4-1中判断为是侵入状态,则控制装置80在步骤S4-2中进行所述通知,并且使基于操作部44a的操作的该电动移动设备M的行驶减速并维持。在这种情况下,与手动驾驶时相比,利用者U能够花费更多的时间和注意来解除侵入状态。该处理对用于实现提高自动驾驶中的利用者U的舒适度是有利的,此外,对用于确保电动移动设备M的周围和利用者U的安全是有利的。
另外,在第一~第四处理例中,在检测范围DA1内成为侵入状态时、以及在检测范围DA2内成为侵入状态时,能够改变步骤S4-2的通知。通过针对每个传感器改变通知,利用者U容易掌握状况。该处理对用于实现与步骤S4-2的显示对应的利用者U的快速应对是有利。
另外,在步骤S4-1中未判断为成为侵入状态时,控制装置80可以进行表示不是侵入状态的通知。例如,控制装置80使用显示装置200、声音产生装置300、发光部400等,表示不是侵入状态。通过该通知,利用者U能够逐次或定期地知道没有遮挡检测范围DA1、DA2。
此外,在步骤S4-2中通知成为侵入状态时,控制装置80可以通知侵入的程度。例如,控制装置80使用显示装置200、声音产生装置300、发光部400等通知侵入量。侵入量可以使用cm、英寸等单位以数值表示。通过该通知,利用者U能够采取更适当的应对以解除侵入状态。
此外,在步骤S4-2中通知成为侵入状态时,可以通知用于解除侵入状态的方法。例如,控制装置80使用显示装置200、声音产生装置300等,促使膝盖向宽度方向内侧移动。
此外,在步骤S4-1中,可以在所述物体占据侵入检测范围的阈值以上的范围时判断为是侵入状态。例如,在所述物体占据侵入检测范围的20%以上的范围时判断为是侵入状态。在这种情况下,不存在侵入程度少的状态下的无用的通知以及行驶状态的变更,这关系到提高电动移动设备M的舒适度。
此外,在步骤S4-1中,在所检测的所述物体未随着电动移动设备M的行驶而移动的情况下,控制装置80可以识别为该物体是利用者U的身体的一部分、利用者U的携带物品、利用者U随身的物品或者放置于行李放置部42的行李B。在检测范围DA1、DA2内检测出的电动移动设备M的周围的物体随着电动移动设备M的行驶而移动。与此相对,利用者U的身体的一部分、利用者U的携带物品、利用者U随身的物品或者放置于行李放置部42的行李B不会随着电动移动设备M的行驶而在检测范围DA1、DA2内移动。该结构对用于降低无用的通知以及行驶状态的变更是有利的,对用于准确地识别遮挡检测范围DA1、DA2的物体也是有利的。
此外,控制装置80可以在步骤S4-1中推定侵入到侵入检测范围内的物品,并且在步骤S4-2中显示用于表示推定出的物品的字符、图形等。例如,在存储装置82中存储有各种利用者U的膝盖的图像,控制装置80能够基于该图像,判断为侵入到侵入检测范围内的物品是膝盖。该图像可以是静止图像、动态图像、特征点的集合等各种图像。此外,可以使用公知的学习功能、公知的语义分割(semantic segmentation)技术等,进行基于该图像的判断、该图像的收集和识别。
在本实施方式中,在图9的管理表中显示利用者U的身体的一部分、携带物品、随身的物品或行李放置部42的行李B是否是进入到立体相机90或LiDAR95的检测范围DA1、DA2内的侵入状态的信息。显示于管理表的该信息对于提供该服务的人来说,对用于判断是否需要利用者U的辅助是极其有用的。
此外,在本实施方式中,在图9的管理表中与就座传感器53的检测结果一起显示是否是侵入状态的信息。该结构在判断显示为是侵入状态时的利用者U或电动移动设备M的状态方面是有用的。在一个例子中,在步骤5的自动返回时,就座传感器53的检测结果为NO,如果判断为在检测范围DA1内是侵入状态,则提供该服务的人能够判断为不正常。例如,由于在座椅单元S上放置有纸制的箱子或袋子,就座传感器53的检测结果为NO,在该箱子或袋子侵入到检测范围DA1内时成为上述状态。在立体相机90的镜头等存在异常的情况下,也有可能成为上述状态。
此外,在本实施方式中,在图9的管理表中与利用传感器49的检测结果一起显示是否是侵入状态的信息。该结构对用于判断显示为是侵入状态时的利用者U或电动移动设备M的状态是有用的。在一个例子中,虽然利用者U未将行李B放置于行李放置部42,但是在利用者U的围巾等衣服的一部分进入到LiDAR95的检测范围DA2内的情况下,利用传感器49的检测结果为NO,判断为在检测范围DA2内是侵入状态。如果该状态继续,则围巾有可能被卷入后轮20。提供该服务的人能够早期发现这种异常。在利用传感器49或LiDAR95中存在异常的情况下,也有可能成为上述状态。
此外,图9的管理表还具有电动移动设备M的行驶状态的信息或者所述利用信息。该信息对于提供该服务的人早期发现异常是有利的。
另外,在图9中,也可以代替是否是侵入状态的信息,显示是否进行了电动移动设备M的行驶状态的变更的信息。该信息对于提供该服务的人来说,对于早期发现异常是极其有用的。
在一个例子中,在管理表中,考虑在电动移动设备M通过操作部44a的操作而行驶时,电动移动设备M成为减速行驶状态,行驶状态为手动的行驶中的情况。从该信息可知,由于向检测范围DA1、DA2的侵入,降低了电动移动设备M的速度。基于行驶状态的信息,提供该服务的人能够知道电动移动设备M是手动的行驶状态还是自动驾驶的行驶状态。该信息在确定与使辅助者前往该电动移动设备M相关的优先顺序的方面是有用的。
此外,如图9所示,管理表还具有从成为侵入状态起的经过时间的信息。该信息对于提供该服务的人来说,对早期发现异常是极其有用的。另外,管理表有时也具有从进行行驶状态的变更起的经过时间的信息。该信息对早期发现异常是极其有用的。在从侵入状态或行驶状态的变更起经过了长时间的情况下,提供该服务的人能够使辅助者前往以辅助该电动移动设备M的利用者U。
另外,优选在管理表中包含利用者U的目的地的信息和与希望到达时刻相关的时刻信息中的至少一方。该信息对提供该服务的人准确地进行使辅助者前往的判断是有用的。例如,在利用者U的希望到达时刻紧迫的状况下,在多次发生了侵入状态的情况下,或者侵入状态长时间发生的情况下,可以认为使辅助者前往的必要性高。
在作为自动返回步骤的步骤S5中,管理计算机100或控制装置80判断是否可以在自动驾驶模式下开始利用者U离开的电动移动设备M的返回动作。提供该服务的人可以一边观看管理计算机100的显示装置103、5等、一边判断该电动移动设备M是否可以在驾驶模式下开始返回动作,并将该判断输入到管理计算机100。
基于所述判断,开始自动驾驶下的返回动作,该电动移动设备M到达作为返回目的地位置的例如管理站2。
在作为后处理步骤的步骤S6中,提供该服务的人使位于管理站2的多个电动移动设备M移动到仓库等储存空间。
在所述运用或其他运用中,利用者U在乘坐于电动移动设备M时,通过操作显示装置200或设定部45,能够经由显示装置200等进行与提供该服务的人的会话、聊天等。该结构有助于利用者U的安心感、防止利用者U错误使用电动移动设备M等。通过该结构,提供该服务的人能够向具有重复步骤S4-2的通知等不良情况的利用者U传达解除方法。
此外,在上述实施方式中,利用传感器49也可以不仅检测行李放置部42上的物体,还检测电动移动设备M的其他行李放置部的物体和座椅单元S上的物体。例如,如果在行李放置部42的上方由杆等支承部件支承作为利用传感器49的视觉传感器,则行李放置部42和座椅单元S进入到视觉传感器的检测范围内。在这种情况下,对于利用者U放置在座椅单元S上的行李也通过视觉传感器进行拍摄并保存于存储器。
另外,在座椅单元S进入到利用传感器49的检测范围内的情况下,利用传感器49也作为就座传感器53发挥功能。
另外,也可以在航站楼T以外的设施内提供使用了电动移动设备M的所述服务。例如,可以在医院、火车站等设施内提供所述服务。此外,也可以在游乐园、室外美术馆、大学、概念城镇等室外的设施提供所述服务。
在所述运用中,可以设置多个待机场所。例如,待机场所可以设置在与各登机口对应的位置。此外,也可以在利用者U的利用结束时,找到电动移动设备M能够待机的场所,将找到的能够待机的场所用作待机场所。作为这种能够待机的场所,具有墙壁的附近的空间等。
在本实施方式中,在控制臂43或扶手43a的前端设置有立体相机90作为传感器,在座椅单元S的后端部或行李放置部42的下方设置有LiDAR95作为传感器。代替于此,如图14所示,也可以在座椅单元S的上方配置公知的三维LiDAR500。三维LiDAR500例如固定在设置于移动设备主体30的杆501的上端。控制装置80也能够对三维LiDAR500的检测范围DA执行与上述相同的侵入状态的判断。即,通知和管理数据的制作也与上述同样地进行,在图15~图18的例子中也同样。另外,可以认为主要是利用者U的头部、利用者U所佩戴的帽子、头巾、利用者U的携带物品等侵入到三维LiDAR500的检测范围内的情况较多。
另外,本实施方式的电动移动设备M是一个利用者U就座于座椅单元S而乘坐的设备,但是也可以考虑在移动设备主体30的后端部例如设置乘车基座,在乘车基座上站立与利用者U不同的利用者而乘坐的情况。在这种情况下,例如行李放置部42在车辆前后方向上变小,LiDAR95安装于乘车基座的下表面等。此外,站立在乘车基座上而乘坐的利用者也能够为了电动移动设备M的手动行驶或自动驾驶行驶而对操作部44a或显示装置200进行操作。即使在以上述方式利用者U和利用者乘坐电动移动设备M的情况下,控制装置80也能够对各传感器90、95的检测范围DA1、DA2执行与上述相同的侵入状态的判断。此外,控制装置80能够执行与上述相同的通知和驾驶状态的变更,由此得到的效果与上述相同。
此外,如图15所示,也可以设置固定于从控制臂43向前方延伸的框架611的前端侧传感器610、以及固定于从移动设备主体30的后端部向后方延伸的框架621的后端侧传感器620。在图15中,在座椅单元S的背面还设置有背面侧传感器630。各传感器610、620、630可以是二维相机、三维相机、三维距离传感器等。控制装置80也能够对各传感器610、620、630的检测范围执行与上述相同的侵入状态的判断。
此外,如图16所示,也可以在一对控制臂43各自的侧面设置传感器710,在移动设备主体30的前端部在宽度方向设置一对传感器720。传感器710、720可以是三维相机、三维距离传感器、三维LiDAR等。控制装置80也能够对各传感器710、720的检测范围执行与上述相同的侵入状态的判断。另外,如图16中双点划线所示,一对传感器720可以设置在一对前轮的上方。在这种情况下,控制装置80也能够对各传感器720的检测范围执行与上述相同的侵入状态的判断。
另外,如图17所示,对于设置于与上述实施方式不同类型的电动移动设备M1的传感器800,电动移动设备M1的控制装置也可以执行与上述相同的侵入状态的判断、以及与上述相同的通知和驾驶状态的变更。图17的电动移动设备M1是一个利用者乘坐的设备,具有利用者站立乘坐的乘车基座810、支承乘车基座810的一对车轮820、以及从乘车基座810向上方延伸且供利用者握持的把手部830。此外,图17的电动移动设备M1具备:马达,用于分别驱动一对车轮820,与上述实施方式的马达MT相同;以及控制装置,用于驱动马达,与上述实施方式的控制装置80相同。电动移动设备M1的移动设备主体具有乘车基座810、车轮820、把手部830、马达和控制装置。
图17的电动移动设备M1在利用者使乘车基座810倾斜时,控制装置控制各马达,以使电动移动设备M1向乘车基座810倾斜的方向行驶。即,电动移动设备M1是一个利用者乘坐并进行操作的设备。
此外,控制装置基于传感器800的检测结果,进行用于避开回避对象的马达的旋转速度的降低(回避动作)或停止(自动停止)。
传感器800可以是三维相机、三维距离传感器、LiDAR等。在乘车基座810、把手部830等上设置有通知装置,该通知装置是与上述实施方式的声音产生装置300和显示装置200相同的声音产生装置和显示装置,控制装置使用通知装置进行与上述实施方式相同的通知。
此外,如图18所示,对于设置于进一步不同的类型的电动移动设备M2的传感器900,电动移动设备M2的控制装置也可以执行与上述相同的侵入状态的判断、以及与上述相同的通知和驾驶状态的变更。图18的电动移动设备M2基本上是一个利用者U乘坐的设备,具有利用者U乘坐的床部910、从床部910向下方延伸的多个腿部920、以及分别设置在多个腿部920的下端的车轮930。图18的电动移动设备M2具有与上述实施方式的马达MT相同的操作用的控制器940。此外,图18的电动移动设备M2具备:马达,用于分别驱动多个车轮930,与上述实施方式的马达MT相同;以及控制装置,用于驱动各马达,与上述实施方式的控制装置80相同。电动移动设备M2的移动设备主体具有床部910、腿部920、车轮930、控制器940、马达和控制装置。电动移动设备M2有时也被称为带自动运送功能的床。
图18的电动移动设备M1在床部910上的利用者U操作控制器940的操作部940a时,控制装置控制各马达,以使电动移动设备M2向操作部940a的操作方向行驶。即,电动移动设备M2是一个利用者U能够乘坐并进行操作的设备。另外,也可以不是床部910上的利用者U而是其他操作者对操作部940a进行操作。在这种情况下,电动移动设备M2通过其他操作者的操作而移动。此外,在控制装置具有上述自动驾驶程序82c的情况下,控制装置控制各马达,以使电动移动设备M2通过自动驾驶而前往利用者U或其他操作者使用控制器940等输入装置输入的目的地。
此外,控制装置基于传感器900的检测结果,进行用于避开回避对象的马达的旋转速度的降低(回避动作)或停止(自动停止)。
传感器900可以是三维相机、三维距离传感器、LiDAR等。在床部910、腿部920等上设置有通知装置,该通知装置是与上述实施方式的声音产生装置300和显示装置200相同的声音产生装置和显示装置,控制装置使用通知装置进行与上述实施方式相同的通知。
在图10中,如上所述,例如当变更候选范围AR3被设定为侵入检测范围时,图19中原来的侵入检测范围AR1与变更候选范围AR3的差异范围成为检测取消范围CA。在图19中,所述差异范围由斜线表示,所述差异范围也是检测取消范围CA。检测取消范围CA在立体相机90的检测范围DA1内,是利用者U的身体的一部分、衣服的一部分或携带物品的一部分可能存在的范围,但是不是判断为所述侵入状态的范围。
在图19中,变更候选范围AR3的利用者U侧的端部(车辆后方的端部)配置在比图10的情况靠向前方的位置。通过将变更候选范围AR3设定为侵入检测范围,在就座于座椅单元S的利用者U的前方的范围内,利用者U的身体的一部分、衣服的一部分或携带物品的一部分可能存在的检测取消范围CA变宽。
在图10和图19中,在将由立体相机90得到的所述检测数据转换为所述二维俯视图像之后,在该图像中检测取消范围CA被设定为非检测范围。或者,在作为所述检测数据的所述三维空间内的数据中检测取消范围CA被设定为非检测范围。也可以通过控制装置80不识别传感器90的检测范围DA1的一部分的设定来设定检测取消范围CA。也可以通过其他公知的方法来设定检测取消范围CA。
如图20所示,也能够将检测取消范围CA设定为利用者U的前方的范围。在图20中,检测取消范围CA也是由斜线表示的范围。对于LiDAR95的检测范围DA2也能够与检测范围DA1的情况同样地设定检测取消范围CA。
如上所述,如图10、图19、图20等那样设定的检测取消范围CA能够在移动设备主体30的前后方向上进行调节。例如,如上所述,多个变更候选范围AR2、AR3显示于显示装置200,如果选择变更候选范围AR2,则在移动设备主体30的前后方向上调节检测取消范围CA。利用者U的体型、身高、衣服等是各种各样的。在利用者U的腰弯曲而利用者U的腿长的情况下,有时利用者U的膝盖比电动移动设备M的前端更向前方突出。此外,有时利用者U的衣服无论如何都会大幅度地侵入到立体相机90的检测范围DA1内。能够以上述方式调节检测取消范围CA对稳定地提供电动移动设备M的共享服务是极其有用的。
此处,例如,如图19和图20所示,利用者U的前方的范围是指移动设备主体30或座椅单元S的宽度方向的中心线CL与中心线一致的宽度20cm等的范围。如图19、图20等所示,在利用者U的前方的范围设定有检测取消范围CA。检测取消范围CA的整个范围不必包含于利用者U的前方的范围,检测取消范围CA的一部分也可以配置在利用者U的前方的范围的宽度方向的外侧。
在如图10、图19、图20等那样在利用者U的前方的范围设定检测取消范围CA的情况下,如图21所示,在电动移动设备M的下表面安装有下侧传感器96。如图6所示,下侧传感器96与控制装置80连接。在本实施方式中,下侧传感器96是二维LiDAR,但是也可以使用三维LiDAR、雷达、毫米波传感器等。在本实施方式中,下侧传感器96在罩部32b中配置在比承载就座于座椅单元S的利用者U的脚的脚承载面32c靠向下方的位置。
例如,下侧传感器96遍及图19和图20所示的检测范围DA3扫描激光,下侧传感器96检测碰到物体而弹回的激光。即,下侧传感器96在检测取消范围CA的下侧范围LA(图21)内,检测存在于比规定距离(1m、几十cm等)更接近下侧传感器96的距离的所述回避对象。在本实施方式中,如图21所示,下侧范围LA是比脚承载面32c靠向下侧的范围。与本实施方式不同,在脚承载面32c的高度变化的情况下,下侧范围LA也可以是比脚承载面32c的最高的位置靠向下侧的范围。在下侧传感器96是三维LiDAR、立体相机等的情况下,下侧传感器96有时进行比脚承载面32c靠向下侧的范围的所述回避对象的检测,并且进行比脚承载面32c靠向上侧的范围的所述回避对象的检测。此外,下侧传感器96也可以检测图19和图20所示的前方范围的宽度方向外侧的所述回避对象。
在该结构中,例如,由于利用者U的裙子等衣服无论如何都会进入到立体相机90的检测范围DA1内,所以在利用者U的前方设定有检测取消范围CA的状态下,通过下侧传感器96从脚承载面32c的下方进行所述回避对象的检测。即,通过下侧传感器96进行下侧范围LA中的所述回避对象的检测。特别是如图19和图20所示,在检测取消范围CA存在于比电动移动设备M或脚承载面32c靠向前方的位置的情况下,通过下侧传感器96从脚承载面32c的下方进行下侧范围LA中的所述回避对象的检测。
此外,如果检测到所述回避对象,则控制装置80控制各马达MT使电动移动设备M进行回避动作。回避动作的例子是用于避开回避对象的各马达MT的旋转速度的降低或停止(自动停止功能)、以及用于限制电动移动设备M向回避对象侧的移动的各马达MT的控制等。因此,在裙子等衣服意外地将要进入到电动移动设备M的下侧的情况下,能够防止裙子等衣服被卷入前轮10等,降低因卷入而引起的衣服的损伤等。
进而,例如,就座的利用者U通过手动驾驶使电动移动设备M移动,由此在使就座于电动移动设备M的利用者U位于桌子前时,即使桌子下的箱子、行李、桌子腿等未被利用者U识别,它们也会由下侧传感器96检测为回避对象。因此,即使在利用者U的前方设定有检测取消范围CA的状态下,也防止电动移动设备M或利用者U意外地强力接触桌子下的物体。
进而,在利用者U的前方设定有检测取消范围CA的状态下,即使在由于电动移动设备M转弯而在上下方向上延伸的杆等配置在检测取消范围CA内的情况下,也通过下侧传感器96将该杆检测为所述回避对象。由此,防止电动移动设备M或利用者U意外地强力接触该杆。
如图22所示,在脚承载部32d的前端部向上方突出的情况下等,也可以将下侧传感器95配置在电动移动设备M的例如脚承载部32d的前端部。在这种情况下,下侧传感器96从脚承载面32c的下方且从脚承载部32d的前端部,进行作为下侧范围LA的比脚承载面32c靠向下侧的范围的所述回避对象的检测。
另外,也可以将下侧范围LA作为检测取消范围CA、即相对于前轮10的接地面为高度20cm以下的范围。在通过下侧传感器90对该下侧范围LA检测回避对象的情况下,也可以起到与上述相同的作用效果。
此外,脚承载面32c有时由在车辆宽度方向等上延伸的单一或多个轴等部件形成。在这种情况下,在轴等部件的面中承载利用者U的脚的底面的部分是脚承载面32c。
此外,在一个例子中,在就座传感器53开启时,控制装置80使用下侧传感器96的检测数据,控制各马达MT以进行回避动作。此外,在就座传感器53关闭时,控制装置80消除检测取消范围CA,或者将检测取消范围CA配置在比电动移动设备M的前端或脚承载部的前端靠向后方的位置。此时,例如,控制装置80优先于下侧传感器96的检测数据而使用基于立体相机90的回避对象的检测数据,控制各马达MT以进行回避动作。由此,能够降低就座传感器53关闭时的电动移动设备M的碰撞风险。
此外,在图9的管理表中还可以对各电动移动设备M显示是否通过下侧传感器96检测到回避对象,或者是否进行了用于回避所述回避对象的回避动作。在大多数情况下,能够基于显示于管理表的电动移动设备M的位置信息、以及检测到回避对象或者进行了回避动作的信息,判断是否发生了异常。也可以在管理表中显示通过下侧传感器96检测到回避对象的时间等。能够根据该时间信息进行是否发生了异常的适当的判断。这些结构对提供该服务的人来说,对判断是否需要利用者U的辅助是极其有用的。
另外,也可以不设置判断就座于座椅单元S的利用者的身体的一部分等的侵入的侵入检测范围而设置检测取消范围CA。即,在检测范围DA1、DA2内直接设置检测取消范围CA。在这种情况下,在利用者U的前方的范围设定有检测取消范围CA的状态下,如果通过下侧传感器96进行下侧范围LA中的所述回避对象的检测,则起到与上述同样的作用效果。
附图标记说明:
2:管理站(租赁站);3:接待处;4:计算机;5:显示装置;10:前轮;20:后轮;30:移动设备主体;42:行李放置部;44:控制器;44a:操作部;45:设定部(输入装置);49:利用传感器(视觉传感器);53:就座传感器;60:控制单元;80:控制装置;81:处理器;82:存储装置;82b:回避控制程序;82c:自动驾驶程序;82d:行李有无判定程序;82e:侵入状态判断程序;90:立体相机(第一传感器);95:LiDAR(第二传感器);96:下侧传感器;100:管理计算机;102:存储装置;102a:管理数据;200:显示装置;201:输入装置;300:声音产生装置;400:发光部;500:三维LiDAR;610:前端侧传感器;620:后端侧传感器;630:背面侧传感器;710、720、800、900:传感器;M、M1、M2:电动移动设备;S:座椅单元;T:航站楼;CA:检测取消范围;LA:下侧范围。
- 电动移动设备以及设施内的系统
- 用于无接触地将电能传输给能在设施的地面上运动的移动设备的系统