一种自动化冻存机
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及生物样本存储技术领域,特别是涉及一种自动化深低温冻存机及多温区自动转运存储的方法。
背景技术
生物冻存机是标准化收集、处理、储存健康和疾病生物体的生物大分子、细胞、组织和器官等样本的设备,大多数生物样本需要存储在低温环境内,特别是某些用于储存回输人体的细胞的生物冻存机,其存储环境需要在温度接近于存储液氮的深低温环境中,通常生物样本的存储环境分为-80℃、-140℃、-196℃三种低温存储方式,目前三种低温存储方式需要多台设备及工序才能同时完成,根据生物样本冻存的需求,有的生物样本需要先在-80℃冻存机内冷冻一定周期后,需要人工转移至-140℃冻存机内存储,有的生物样本需要先在-196℃冻存机内冷冻一定周期后,需要人工转移至-80℃冻存机内存储,在整个冻存过程中需要人工参与转运且整个工序流程繁琐,为了杜绝人工转运的危险及不同温度冻存过程中能够实现一体自动化冻存,本发明设计了一种深低温与低温存储一体机,且深低温与低温存储能够实现自动化转运冻存,减少人工参与,并在一台设备上完成自动化的低温存储转运工作,方便更好的存储与管理。
发明内容
为了杜绝人工转运的危险及不同温度冻存过程中能够实现一体自动化冻存,本发明设计了一种深低温与低温存储一体机,且深低温与低温存储能够实现自动化转运冻存,减少人工参与,并在一台设备上完成自动化的低温存储转运工作,方便更好的存储与管理。本发明中的一种自动化冻存机,包括冻存机罐体系统、转移系统、识别整理系统、固定架系统组成。
冻存机罐体系统包括两个真空绝热存储罐体,真空绝热存储罐体配备有制冷系统,其中一个冻存机罐体主要负责-140℃及-196℃的深低温存储环境,简称为深低温罐体,深低温罐体分为两种模式,分别是液相深低温罐体和气象深低温罐体,液相深低温罐体是指生物样本需要完全冻存在液氮中,不能暴露在空气中,气象深低温罐体是指液体液氮的气化环境,气相就是让液氮气化,将生物样本存储在汽化后的氮气中,直观理解就是一个液体液氮保存,温度达-196℃,一个气体液氮保存,温度达-140℃,另一个冻存机罐体主要负责-80℃的低温存储环境,简称为低温罐体,低温罐体的制冷模式需要液体液氮喷淋和制冷压缩机相互配合制冷进行低温存储,两个冻存机真空绝热存储罐体内部均设有一个底盘、若干冻存架、一个冻存盖组成,冻存盖可以活动的设置于冻存机罐体的开口处,若干冻存架按照一定的规则排放在底盘上,底盘固定在冻存机罐体下部,冻存盖用于开启闭合冻存机罐体的罐塞,冻存机罐体外面下部安装有若干脚轮,方便冻存机罐体遇到特殊情况时能够单独转运至其它安全区域。
转移系统包括样品输送台、运输机械手、取样机械手、中转箱,样品输送台包含伺服电机、输送板、导轨、螺杆等,生物样本盒放入中转箱内,中转箱放置到输送板上,输送板依靠伺服电机驱动螺杆旋转进而带动输送板在导轨上做直线伸缩运动,方便中转箱能够自动进入冻存机内或将中转箱由冻存机内输送出来,运输机械手为双工位伺服电机机械手,负责生物样本的抓盒抓管及冻存盖、中转箱打开关闭工作,运输机械手可进行360度旋转及X向导轨和Y向导轨直线伸缩运动工作功能,取样机械手为双工位伺服电机机械手,负责冻存机罐体内生物冻存盒的进罐与出罐工作,取样机械手可进行360度旋转及X向导轨和Y向导轨直线伸缩运动工作功能,取样机械手与运输机械手在暂存区进行生物样本盒的换取,中转箱为单独的保温箱,中转箱内主要存放外部环境的生物样本盒,中转箱用于往返于外界环境与冻存机内部的中转保温工作;。
识别整理系统包括二维码扫码机、保温板组成,二维码扫码机用于自动读取样本盒及样本管底部的二维码信息,并把二维码信息传输给冻存机管理系统实现生物样本信息的管理、存储和信息校验,保温板用于对冻存盒临时性的冻存保温或程序降温,并设有液氮喷淋,保温板上方放置冻存盒后,运输机械手会进行冻存盒内冻存管挑选与整理工作。
固定架系统包括冻存机主体框架,中间板组成,其中冻存机主体框架主要是对整个冻存机进行结构布局的固定,中间板由多块不锈钢板拼接而成,中间板固定在冻存机主体框架上,当冻存机罐体需要转移时,冻存机主体框架在冻存机罐体的两侧均可以进行拆分和组装框架,中间板也会随着冻存机罐体的转运而脱离罐体的固定,方便冻存机罐体的转运。
附图说明:
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一种实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他实施例的附图。
图1为本发明一种自动化冻存机固定架系统示意图:
图2为本发明一种自动化冻存机结构图:
图3为本发明一种自动化冻存机取样机械手示意图:
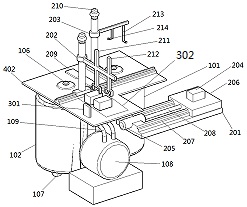
图4为本发明一种自动化冻存机俯视图:
图5为本发明一种自动化冻存机样品输送台工作工序1示意图:
图6为本发明一种自动化冻存机样品输送台工作工序2示意图:
图7为本发明一种自动化冻存机运输机械手示意图:
图8为本发明一种自动化冻存机罐体内冻存架的放置图:
图9为本发明取样机械手抓取冻存盒工作工序1示意图:
图10为本发明取样机械手抓取冻存盒工作工序2示意图:
图11为本发明取样机械手抓取冻存盒工作工序3示意图:
图12为本发明取样机械手抓取冻存盒工作工序4示意图:
图13为本发明取样机械手抓取冻存盒工作工序5示意图:
图14为本发明取样机械手抓取冻存架示意图:
图15为本发明深低温罐体示意图:
图16为本发明低温罐体示意图。
附图标记说明:
1:冻存机罐体系统,101:深低温罐体,102:低温罐体,103:底盘,104:冻存架,105:冻存盒,106:冻存盖,107:脚轮,108:制冷压缩机,109:制冷压缩机盘管,110:冻存架取样孔,111:罐内液氮喷淋,112:液相深低温罐体,113:气象深低温罐体,114:罐体进出口,130:液氮输入管路,131:液体液氮,
2:转移系统,201:样品输送台,202:运输机械手,203:取样机械手,204:中转箱,205:伺服电机,206:输送板,207:导轨,208:螺杆,209:暂存区,210:驱动伺服电机,211:开盖抓盒爪,212:挑管选管爪,213:纵向提取爪,214:横向提取爪,215:驱动导轨,216:横向臂,
3:识别整理系统,301:二维码扫码机,302:保温板,304:扫码识别区,
4:固定架系统,401:主体框架,402:中间板。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
参照图1至图4,本实施例提供了一种自动化冻存机,包括冻存机罐体系统(1)、转移系统(2)、识别整理系统(3)、固定架系统(4)组成,其中冻存机罐体系统(1)包括两个真空绝热存储罐体,真空绝热存储罐体配备有制冷压缩机(108),其中一个冻存机罐体主要负责-140℃及-196℃的深低温存储环境,简称为深低温罐体(101),深低温罐体(101)按照液氮液态和汽态冻存方式分为两种冻存温度,分别是液相深低温罐体(112)和气象深低温罐体(113),另一个冻存机罐体主要负责-80℃的低温存储环境,简称为低温罐体(102),低温罐体(102)的制冷模式需要罐内液氮喷淋(111)和制冷压缩机(108)相互配合制冷进行低温存储,制冷压缩机(108)通过制冷压缩机盘管(109)对低温罐体(102)进行制冷控制,制冷压缩机盘管(109)通过延长制冷管延长至低温罐体(102)内部,并以螺纹盘旋的形式固定在低温罐体(102)内部罐体上进行低温制冷,制冷压缩机盘管(109)由输入和输出两条管路组成一个回路,罐内液氮喷淋(111)通过外部液氮存储罐与低温罐体(102)管路连接,并向低温罐体(102)内部喷淋液体液氮进行快速制冷,低温罐体(102)通过罐内液氮喷淋(111)的快速制冷和制冷压缩机(108)及制冷压缩机盘管(109)的精密控温,最终达到相互配合制冷控温的存储环境,两个冻存机真空绝热存储罐体内部均设有一个底盘(103)、若干冻存架(104)、一个冻存盖(106)组成,冻存盖(106)可以活动的设置于冻存机罐体进出口(114)上,罐体进出口(114)用于冻存盒(105)和冻存架(104)的进入和取出的开口,设置于罐体中心部位,罐体内部若干冻存架(104)按照一定的规则排放在底盘(103)上,底盘(103)固定在冻存机内罐体下部,冻存盖(106)用于开启闭合冻存机罐体的罐塞,冻存机罐体外面下部安装有若干脚轮(107),方便冻存机罐体遇到特殊情况时能够单独转运至其它安全区域,若干冻存盒(105)放置于若干冻存架(104)中,每个冻存架(104)上方设有冻存架取样孔(110),冻存架取样孔(110)用于取样机械手(203)对冻存架(104)的抓取,取样机械手(203)还可以对冻存盒(105)进行单盒抓取。
转移系统(2)包括样品输送台(201)、运输机械手(202)、取样机械手(203)、中转箱(204),其中样品输送台(201)包含伺服电机(205)、输送板(206)、导轨(207)、螺杆(208)等,生物冻存盒(105)放置在中转箱(204)内,中转箱(204)放置到输送板(206)上,输送板(206)依靠伺服电机(205)驱动螺杆(208)旋转进而带动输送板(206)在导轨(207)上做直线伸缩运动,方便中转箱(204)能够自动进入冻存机内或将中转箱(204)由冻存机内输送出来,输送板(206)为可伸缩式导轨滑板,当没有工作时,会自动折叠在冻存机内部,需要工作时会延展输送板(206)至冻存机外部,运输机械手(202)为双工位伺服电机机械手,包含横向提取爪(214)和挑管选管爪(212)组成,开盖抓盒爪(211)和挑管选管爪(212)可以在横向臂(216)上进行上下伸缩活动,运输机械手(202)可以沿着驱动导轨(215)进行导轨直线活动,运输机械手(202)的开盖抓盒爪(211)负责生物冻存盒(105)的抓盒及冻存盖(106)、中转箱(204)箱盖的打开关闭工作,运输机械手(202)的挑管选管爪(212)用于对生物冻存盒(105)内冻存管的整理工作,运输机械手(202)可进行360度旋转及X向导轨和Y向导轨直线伸缩运动工作功能,取样机械手(203)为双工位伺服电机机械手,包含纵向提取爪(213)和横向提取爪(214),纵向提取爪(213)和横向提取爪(214)可以在横向臂(216)上进行上下伸缩活动,取样机械手(203)可以沿着驱动导轨(215)进行导轨直线活动,取样机械手(203)的纵向提取爪(213)负责冻存机罐体内纵向生物冻存盒(105)及冻存架(104)的进罐与出罐工作,取样机械手(203)的横向提取爪(214)负责冻存机罐体内横向生物冻存盒(105)及冻存架(104)的进罐与出罐工作,取样机械手(203)可进行360度旋转及X向导轨和Y向导轨直线伸缩运动工作功能,取样机械手(203)与运输机械手(202)均设有驱动伺服电机(210),用于机械手360度旋转工作,取样机械手(203)与运输机械手(202)在暂存区(209)进行生物冻存盒(105)的换取,中转箱(204)为单独的保温箱,中转箱(204)内主要存放外部环境的生物冻存盒(105),中转箱(204)通过输送板(206)用于往返于外界环境与冻存机内部的中转保温工作;。
识别整理系统(3)包括二维码扫码机(301)、保温板(302)组成,二维码扫码机(301)用于自动读取冻存盒(105)及样本管底部的二维码信息,并把二维码信息传输给冻存机管理系统实现生物样本信息的管理、存储和信息校验,保温板(302)用于对冻存盒(105)临时性的存放整理及冻存保温工作,保温板(302)上方放置冻存盒(105)后,运输机械手(202)的挑管选管爪(212)会对冻存盒(105)内冻存管进行挑选与整理工作。
固定架系统(4)包括冻存机主体框架(401),中间板(402),其中冻存机主体框架(401)主要是对整个冻存机进行结构布局的固定,中间板(402)由多块不锈钢板拼接而成,中间板(402)固定在冻存机主体框架(401)上,当冻存机罐体需要转移时,冻存机主体框架(401)在冻存机罐体的两侧均可以进行拆分和组装框架,中间板(402)也会随着冻存机罐体的转运而脱离与罐体的固定,方便冻存机罐体的转运,冻存机主体框架(401)上设有样品输送台(201)及制冷压缩机(108),样品输送台(201)可以按照用户需求固定在冻存机主体框架(401)前后左右任意一侧。
参照图5至图6,本实施例提供了一种自动化冻存机样品输送台(201)的工作示意图,其中生物冻存盒(105)放置在中转箱(204)内,中转箱(204)放置到输送板(206)上(可使用机器人进行放置),输送板(206)依靠伺服电机(205)驱动螺杆(208)旋转进而带动输送板(206)在导轨(207)上做直线伸缩运动,方便中转箱(204)能够自动进入冻存机内或将中转箱(204)由冻存机内输送出来,输送板(206)为可伸缩式导轨滑板,当没有工作时,会自动折叠在冻存机内部,需要工作时会延展输送板(206)至冻存机外部,即方便中转箱(204)放置到输送板(206)上,又不影响输送板(206)占用冻存机外围面积。
参照图8至图14,本实施例提供了一种自动化冻存机罐体内冻存盒(105)及冻存架(104)的存取方式 。
图8为冻存架(104)在冻存机罐体内按照前后左右矩形排列示意图,方便取样机械手(203)对冻存架(104)上的冻存架取样孔(110)及冻存盒(105)进行精准定位并抓取。
图9为取样机械手(203)的横向提取爪(214)通过冻存机罐体进出口(114)进入罐体内部并下移至冻存盒(105)下方位置。
图10为取样机械手(203)的横向提取爪(214)横向移动至冻存盒(105)下方位置,横向提取爪(214)与冻存盒(105)对齐。
图11为取样机械手(203)的横向提取爪(214)轻微上提并抓紧冻存盒(105),使冻存盒(105)与冻存架(104)进行脱离。
图12为取样机械手(203)的横向提取爪(214)与冻存盒(105)移出冻存架(104)位置。
图13为取样机械手(203)的横向提取爪(214)与冻存盒(105)上移至冻存机罐体进出口(114)上方位置,成功取出冻存盒(105),如需存入冻存盒(105)和冻存架(104)按上述方式进行反向操作即可。
图14为取样机械手(203)的横向提取爪(214)按照上述方式对冻存架(104)的冻存架取样孔(110)进行抓取的示意图,抓取冻存架只需抓取冻存架取样孔(110)即可,不需移动至冻存盒(105)底部抓取。其中底盘(103)为固定式的与冻存机罐体内部连接,使取样机械手(203)对冻存架(104)及冻存盒(105)的抓取更为安全准确,精度更高。如需抓取冻存机罐体内纵向的冻存盒(105)和冻存架(104),只需取样机械手(203)的纵向提取爪(213)进行上述操作即可。
参照图15为本发明深低温罐体结构示意图,其中深低温罐体(101)按照液氮的液态和汽态状态分为了气象深低温罐体(113)和液相深低温罐体(112),气象深低温罐体(113)为液体液氮(131)气化后的-140℃冻存环境,液相深低温罐体(112)为液体液氮(131)液态状态的-196℃冻存环境,液氮输入管路(130)通过电磁液压阀自动控制气象深低温罐体(113)和液相深低温罐体(112)在罐体内的使用面积,液氮输入管路(130)一端与外部液氮存储罐进行连接并供应,另一端延伸至冻存机罐体内部下方。底盘(103)为固定式的与冻存机罐体内部连接,使取样机械手(203)对冻存架(104)及冻存盒(105)的抓取更为安全准确,精度更高。若干冻存盒(105)放置于若干冻存架(104)中,若干冻存架(104)放置于底盘(103)上。深低温罐体(101)罐体上方中心处设有罐体进出口(114),罐体进出口(114)设有可活动的冻存盖(106)。
参照图16为本发明低温罐体结构示意图,其中低温罐体(102)的制冷模式需要罐内液氮喷淋(111)和制冷压缩机(108)相互配合制冷进行低温存储,制冷压缩机(108)通过制冷压缩机盘管(109)对低温罐体(102)进行制冷控制,制冷压缩机盘管(109)通过延长制冷管延长至低温罐体(102)内部,并以螺纹盘旋的形式固定在低温罐体(102)内部罐体上进行低温制冷,制冷压缩机盘管(109)由输入和输出两条管路组成一个回路,罐内液氮喷淋(111)通过外部液氮存储罐与低温罐体(102)管路连接,并向低温罐体(102)内部喷淋液体液氮进行快速制冷,低温罐体(102)通过罐内液氮喷淋(111)的快速制冷和制冷压缩机(108)及制冷压缩机盘管(109)的精密控温,最终达到相互配合制冷控温的-80℃存储环境。
本发明一种自动化冻存机具体操作方法如下:
首先将外部环境中的生物冻存盒(105)放置在中转箱(204)内。
进一步的,样品输送台(201)上的输送板(206)自动延伸至冻存机外部,将中转箱(204)放置在输送板(206)上(也可使用机器人放置),输送板(206)依靠伺服电机(205)驱动螺杆(208)旋转进而带动输送板(206)做直线伸缩运动,将中转箱(204)自动输送到冻存机内部。
进一步的,运输机械手(202)的开盖抓盒爪(211)将中转箱(204)打开,并抓取生物冻存盒(105)放置在扫码识别区(304),二维码扫码机(301)读取冻存盒(105)及样本管底部的二维码信息,并把二维码信息传输给冻存机管理系统,实现生物样本信息的管理、存储和信息校验。
进一步的,信息确认完成后,运输机械手(202)的开盖抓盒爪(211)抓取生物冻存盒(105)并放置在保温板(302)上方进行保温或程序降温。
进一步的,运输机械手(202)旋转移动至冻存机灌口处,开盖抓盒爪(211)将冻存盖(106)打开,取样机械手(203)的横向提取爪(214)抓取冻存机罐内相应空位的生物冻存盒(105)并放置在暂存区(209),抓取纵向冻存盒(105)就用纵向提取爪(213)进行工作。
进一步的,运输机械手(202)的开盖抓盒爪(211)抓取从冻存机罐内取出的生物冻存盒(105)并放置在保温板(302)上,运输机械手(202)的挑管选管爪(212)根据冻存机管理系统的信息数据进行冻存管的挑选及整理工作。
进一步的,冻存管整理完成后,运输机械手(202)的开盖抓盒爪(211)将生物冻存盒(105)抓取并放置在暂存区(209),取样机械手(203)的横向提取爪(214)将放置在暂存区(209)上的生物冻存盒(105)抓取并放置在冻存机罐体内的冻存架(104)中,运输机械手(202)的开盖抓盒爪(211)将冻存盖(106)关闭。
进一步的,运输机械手(202)与取样机械手(203)回归待机原点,输送板(206)自动折叠至冻存机内部。
特殊情况说明:如果冻存机罐体内的冻存盒(105)没有冻存管的空位,则不需要整理冻存管,深低温罐体(101)与低温罐体(102)的冻存盒(105)如需相互转换存储温度时,只需运输机械手(202)的开盖抓盒爪(211)将冻存盖(106)打开,取样机械手(203)的横向提取爪(214)对冻存盒(105)进行转运,转运完成后,运输机械手(202)的开盖抓盒爪(211)将冻存盖(106)关闭,整个过程冻存机管理系统会自动实现对生物样本信息的管理、存储和信息校验。
生物冻存盒(105)进行深低温存储或者低温存储时,在整个存储过程中,用户可以根据存储需求,选择对应的深低温罐体(101)存储或者低温罐体(102)存储,深低温罐体(101)依靠液体液氮的存储量,进而控制液相深低温罐体(112)和气象深低温罐体(113)的存储温度,实现生物样本-140℃及-196℃的深低温存储工作,低温罐体(102)依靠液体关内罐内液氮喷淋(111)和制冷压缩机(108)及制冷压缩机盘管(109)的相互配合制冷,实现生物样本-80℃的低温存储工作,最终实现本发明一体自动化冻存机的转运工作及多温区自动存储技术。
- 一种细胞自动纯化冻存装置
- 一种细胞自动纯化冻存装置