一种用于割草机器人的刀片连接结构和切割单元控制方法
文献发布时间:2024-01-17 01:15:20
技术领域
本发明公开了一种用于割草机器人的刀片连接结构和切割单元控制方法。
背景技术
割草机器人是一种使用越来越普遍的园林工具,其切割单元上设置有刀片来对草进行切割,不同割草机,通常采用不同的刀片连接方式,一种是固定连接,刀片相对于刀盘固定,这种连接方式下,刀片切割效果好,但是在遇到阻力较大时,例如在草较密的情况下,刀盘容易卡死,严重时会烧毁割草电机;另一种是活动连接,刀片相对于刀盘可以自由转动,此种连接方式下,由于刀盘与刀片之间可以相对活动,当刀片遇到的阻力较大时,刀片可以偏转,减小与草的接触面积,降低一部分阻力和负载,比较利于割草电机启动和在草较密的情况下运行,但是此种刀片切割效果不如固定式的刀片连接结构。
发明内容
针对上述技术问题,本发明提出一种用于割草机器人的刀片连接结构和切割单元控制方法,既具有较高的工作质量,同时还可以在阻力较大时,降低部分负载。
为了实现上述技术目的,本发明采用如下技术手段:
一种用于割草机器人的刀片连接结构,包括刀盘和安装于刀盘上的刀片,所述刀片包括第一状态和第二状态,
所述第一状态下,刀片相对于刀盘位置固定;
所述第二状态下,刀片相对于刀盘可以进行转动;
所述刀片在不同安装状态下或者所述刀盘在不同旋转方向下,刀片在第一状态或者第二状态之间发生变化。
作为本方案的一种改进,所述刀盘上设置有安装座,所述安装座内设置有安装槽,安装槽内设置有用于连接刀片的安装孔,所述安装槽在刀盘边缘具有开口;
所述刀片包括第一刀片和第二刀片,
所述第一刀片宽度等于安装槽宽度,第一刀片安装槽安装时嵌入安装槽中且刀片两侧边缘均与安装槽侧壁接触;
所述第二刀片宽度大于安装槽宽度,第二刀片通过连接螺钉安装,所述连接螺钉上设置有连接部,所述连接部直径大于安装孔且长度大于刀片厚度与安装槽深度之和。
作为本方案的一种改进,所述刀盘上设置有限位装置,
所述刀片在刀盘处于第一旋转状态下,被限位装置限定位置,刀片处于第一状态;
所述刀片在刀盘处于第二旋转状态下,刀片处于第二状态;
所述刀盘在第一旋转状态和第二旋转状态下处于不同的旋转方向。
作为本方案的一种改进,所述限位装置为设置在刀盘上的辅助定位座,所述辅助定位座设置于安装孔一侧,所述辅助定位座内侧贴合刀片一侧的轮廓。
作为本方案的一种改进,所述刀片上用于安装的连接孔位于刀片一端,且该端部外轮廓不超过圆心与连接孔同心且圆周外切于刀片侧边的圆弧。
作为本方案的一种改进,所述限位装置包括设置于刀盘上的包覆座,所述包覆座侧部设置有开口,
所述刀盘在第一旋转状态下,部分位于包覆座内,且至少一侧边与包覆座内壁接触。
作为本方案的一种改进,所述刀片包括定位部,所述定位部位于刀片与其用于切割部分不相同的一端,
所述刀盘在第一旋转状态下,所述定位部部分位于包覆座内,且至少一侧边与包覆座内壁接触;
所述刀盘在第二旋转状态下,所述定位部可以从包覆座侧部的开口旋转移动出包覆座。
作为本方案的一种改进,所述包覆座内还设置有定位件,所述定位件为弹性件,定位件具有开口,其开口端与包覆座侧部开口端位于同一侧,所述定位部位于包覆座内时,定位部由定位件开口嵌入定位件中,所述定位件内宽度由开口处向内至少部分逐渐减小,且最小处不超过刀片厚度。
一种切割单元控制方法,基于上述的用于割草机器人的刀片连接结构,所述刀盘通过驱动件带动旋转,包括如下步骤:
a、获取驱动件负载参数;
b、当负载参数超过预设阈值时,驱动件驱动刀盘在第二旋转状态的旋转方向下运动;
c、当负载参数不超过预设阈值且维持时间超过预设时间时,驱动件驱动刀盘在第一旋转状态的旋转方向下运动。
作为本方案的一种改进,所述驱动件开始运行时,驱动刀盘在第二旋转状态的旋转方向下运动。
作为本方案的一种改进,所述负载参数包括额定功率、额定电压、额定电流。
作为本方案的一种改进,所述预设阈值为额定功率/额定电压/额定电流的110%,所述预设时间不小于30s。
有益效果:
本发明一种安装在自行走机器上的用于割草机器人的刀片连接结构,根据刀盘转向不同,刀片可以在固定式和非固定式之间进行变换,可以根据实际工况需求,调整刀盘转向,进而获得需要的刀片功能。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
附图说明
图1为实施例一中刀盘结构示意图;
图2为实施例一中安装座结构示意图;
图3为实施例一中第一刀片安装结构示意图;
图4为实施例一中第二刀片安装结构示意图;
图5为实施例一中第二刀片安装结构剖视图;
图6为实施例二中刀片安装结构示意图;
图7为实施例二中刀片使用状态图;
图8为实施例三中刀片安装结构示意图;
图9为实施例三中刀片结构示意图;
图10为实施例三中刀片安装结构剖视图;
图11为实施例四中定位件结构示意图;
图12为实施例四中刀片安装结构剖视图;
图13为实施例四中刀片使用状态示意图;
其中,
100、刀盘;101、安装座;102、安装槽;103、安装孔;104、辅助定位座;105、包覆座;106、定位腔;107、定位件;108、固定槽;109、定位凸起;
200、200a、200b、200c、200d均为刀片;201、定位部;
300、连接螺钉;301、连接部。
具体实施方式
下面结合说明书附图以及具体实施例对本发明的技术方案做进一步详细说明。
实施例一
如图1和2所示,刀盘100上设置有安装座101,安装座101内设置有安装槽102,安装槽102内设置有用于连接刀片的安装孔103,安装槽102在刀盘100边缘具有开口。
本实施例中,与刀盘100配合的刀片200具有两种,在实际使用过程中,使用者可以根据自己的需求,选择其中一种进行安装。如图3所示,第一种刀片200a刀片宽度等于安装槽102宽度,刀片200a安装槽102安装时嵌入安装槽102中且刀片两侧边缘均与安装槽102侧壁接触,在上述条件下,刀片200a安装后,作为固定式的刀片进行工作。
如图4所示,第二种刀片200b宽度大于安装槽102宽度,刀片200b通过连接螺钉300安装,如图5所示,连接螺钉300上设置有连接部,连接部直径大于安装孔103且长度大于刀片厚度与安装槽102深度之和。刀片200b安装后,刀片可以在安装座101与连接螺钉300的螺帽之间进行转动,作为非固定式的刀片进行工作。
本方案在具体实施时,机器配备两种刀片已经与两种刀片配合的普通螺钉和连接螺钉300作为配件,使用者可以根据自己的需要选择刀片进行安装或者更换刀片。
本实施例也有一个十分明显的确定,就是需要使用者自行更换刀片,且两种刀片规格不统一。为了解决上述问题,提出如下实施例的方案。
实施例二
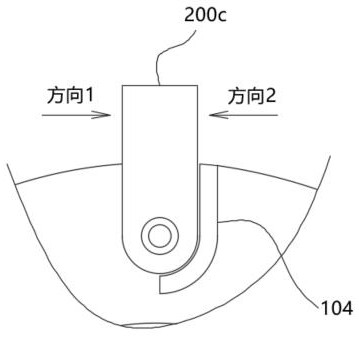
如图6所示,刀盘100上设置有限位装置,限位装置为设置在刀盘100上的辅助定位座104,辅助定位座104设置于安装孔103一侧,辅助定位座104内侧贴合刀片200c一侧的轮廓。刀片200c上用于安装的连接孔位于刀片一端,且该端部外轮廓不超过圆心与连接孔同心且圆周外切于刀片侧边的圆弧。基于上述结构,刀片200c在刀盘100处于第一旋转状态下,被限位装置限定位置,刀片200c处于固定式状态;刀片200c在刀盘100处于第二旋转状态下,刀片200c处于非固定式状态;刀盘100在第一旋转状态和第二旋转状态下处于不同的旋转方向。
下面以图7为例进行具体说明,基于实施例二的结构,当刀盘100逆时针进行旋转时,地面的草丛方向1接触刀片200c侧边的刃部,刀片200c收到与方向1相同的阻力,具有向顺时针方向偏转的势能,但是由于刀片200c侧部被辅助定位座104限制,无法进行偏转,此时,刀片200c虽然是以活动状态连接的刀盘100,但是实际工作情况下,是以固定式的刀片的工作状态进行割草的。具有固定式刀片的切割半径不变,刃部一直进行割草动作等优点。
当刀盘100顺时针进行旋转时,地面的草丛方向2接触刀片200c侧边的刃部,刀片200c收到与方向2相同的阻力,具有向逆时针方向偏转的势能,此时,由于刀片200c另一侧部并没有被辅助定位座104限制,所以,当所受阻力过大时,刀片200c可以发生转动,刀片200c可以旋转到刀盘100外圈内,其刃部旋转后,可以处于不接触草的状态,因此具有了活动刀片工作时,不易卡死,电机不易堵转,具有一定自我降低负载能力等等这些优点。
实施例三
如图8所示,本实施例中,限位装置包括设置于刀盘100上的包覆座105,包覆座105侧部设置有开口。如图9所示,本实施例中刀片200d包括定位部201,定位部201位于刀片与其用于切割部分不相同的一端,或者说,定位部201与刀片用于切割的刀刃部,分别位于刀片两端。
如图10刀盘100在第一旋转状态下,定位部201部分位于包覆座105内,且至少一侧边与包覆座105内壁接触,此时,刀片200d处于固定式状态下工作。刀盘100在第二旋转状态下,定位部201可以从包覆座105侧部的开口旋转移动出包覆座105,刀片200d可以实现非固定式刀片的工作方式。
本实施例中,包覆座105与实施例二中的辅助定位座104起到相同的作用,不同点在于,具有不同的结构行驶,需要注意的是,在实施例二中,辅助定位座104与刀片侧部接触点和受力点主要在刀盘100刀刃部分,在长时间使用过程中,刀片刀刃部分经常装机辅助定位座104,会对其造成损伤。而本实施例中,定位部201与刀刃部位于不同的两端,定位部201边缘不需要做成刀刃形式,与包覆座105接触时,对其损伤更小,包覆座105相比实施例二中辅助定位座104的使用寿命更长。
实施例四
本实施例与实施例三的区别在于,包覆座105内还设置有定位件107,如图11所示,定位件107为弹性件,定位件107具有开口,其开口端与包覆座105侧部开口端位于同一侧。如图12所示,定位部201位于包覆座105内时,定位部201由定位件107开口嵌入定位件107中,定位件107内宽度由开口处向内至少部分逐渐减小,且最小处不超过刀片厚度。为了保证刀片200d的定位部201在进入定位件107内时不收影响,在刀盘100上还设置有固定槽108,定位件107一端安装在固定槽108内,固定槽108深度大于定位件107厚度,定位件107另一端延伸到包覆件开口端部。
如图13所示,基于实施例四的结构,当刀盘100逆时针进行旋转时,地面的草丛方向1接触刀片200d侧边的刃部,刀片200d收到与方向1相同的阻力,具有向顺时针方向偏转的势能,但是由于刀片200d侧部被包覆座105限制,无法进行偏转,同时,定位部201此时嵌入定位件107内,被定位件107卡住,能更稳定的处于固定式状态。为了进一步帮助对刀片200d进行定位,在刀盘100上还可以设置定位凸起109,用来接触刀片200d侧部,起到辅助定位的功能。
当刀盘100顺时针进行旋转时,地面的草丛方向2接触刀片200d侧边的刃部,刀片200d收到与方向2相同的阻力,具有向逆时针方向偏转的势能,此时,由于刀片200d另一侧部并没有被包覆座105限制,所以,当所受阻力过大时,刀片200d的定位部201可以发生转动,移出包覆座105。刀片200d可以旋转到刀盘100外圈内,其刃部旋转后,可以处于不接触草的状态,具备了活动式刀片的特点。需要注意的是,为了保证刀片200d能旋转到刃部回收到刀盘100外圈内,需要控制包覆座105和定位凸起109位于刀盘100中心与安装孔103之间,且距离安装孔103的距离不小于刀片200d宽度的一半
基于实施例二至实施例四,提供一种切割单元控制方法,刀盘100通过驱动件带动旋转,包括如下步骤:
a、获取驱动件负载参数;
b、当负载参数超过预设阈值时,驱动件驱动刀盘100在第二旋转状态的旋转方向下运动;
c、当负载参数不超过预设阈值且维持时间超过预设时间时,驱动件驱动刀盘100在第一旋转状态的旋转方向下运动。
刀片在刀盘100处于第一旋转状态下,处于固定式刀片的状态
刀片在刀盘100处于第二旋转状态下,处于非固定式刀片的状态;
同时,在开始割草,驱动件开始运行时,驱动刀盘100在第二旋转状态的旋转方向下运动。上述负载参数包括额定功率、额定电压、额定电流。预设阈值为额定功率/额定电压/额定电流的110%,预设时间不小于30s。本方法的目的在于,在割草机负载正常的情况下,控制刀盘旋转方向,使刀片处于固定式状态,具有更好的割草效率和割草效果,当割草机负载较大时,调整割草机刀盘旋转方向,使刀片处于非固定状态下,降低负载,防止割草电机损坏。
- 一种木材切割机刀片连接装置及其使用方法
- 一种用于风电叶片延长节的连接结构以及连接方法
- 一种用于异型结构件的连接机构及连接方法
- 机器人割草机切割装置、机器人割草机、切割刀片及方法
- 机器人割草机切割装置、机器人割草机、切割刀片及方法