冰箱
文献发布时间:2024-01-17 01:15:20
技术领域
本发明涉及家用电器技术领域,尤其涉及一种冰箱。
背景技术
相关技术中,冰箱门体的铰链结构大多为单轴形式,通过铰链轴与门体的轴套配合实现门体绕铰链轴旋转,此类铰链结构的门体在开门过程中,门体的角部会超出箱体的侧面。
对于嵌入式冰箱而言,一般是将冰箱放在橱柜内,要求在开门至90°过程中,门体的角部不能过多超出箱体的尺寸,使得冰箱的使用受限。
发明内容
本发明至少在一定程度上解决相关技术中的技术问题之一。
为此,本申请旨在提供一种冰箱,该冰箱的铰链结构使得门体在打开时不会超出或者过多超出箱体的侧面。
根据本申请的冰箱,其包括:
箱体,其限定出隔热的储藏间;所述箱体包括相对设置的第一体侧壁和第二体侧壁;
铰链,其设于所述箱体上,并靠近所述第一体侧壁;所述铰链具有第一铰链轴、位于所述第一铰链轴远离所述第一体侧壁一侧的第二铰链轴;
门体,其具有在门体关闭时远离所述箱体的门前壁、靠近所述铰链且与所述门前壁相连接的门侧壁;
第一轨迹槽和第二轨迹槽,其均呈直线型,且设于所述门体靠近所述铰链的端部;所述第一铰链轴与所述第一轨迹槽相配合,所述第二铰链轴与所述第二轨迹槽相配合;
所述门体由第一角度打开至A
作为本申请的一种实施方式,所述第一轨迹槽的中心轨迹线记为第一轨迹线S,所述第二轨迹槽的中心轨迹线记为第二轨迹线K;
第一轨迹线S包括第一定位端点P
第二轨迹线K包括第一导向端点Q
所述第一轨迹线S位于所述第二轨迹线K靠近所述门前壁的一侧,以使得所述门体能够在旋转的同时向靠近所述第二体侧壁的方向移动一段距离。
作为本申请的一种实施方式,所述门体旋转打开至A
所述门体由A
其中,0°<A
作为本申请的一种实施方式,所述第一轨迹线S所在直线与所述第二轨迹线K相交于第一导向点Q
作为本申请的一种实施方式,所述门体旋转打开至A
所述门体由A
其中,0°<A
作为本申请的一种实施方式,所述第一轨迹线S所在直线与所述第二轨迹线K相交于第一导向点Q
作为本申请的一种实施方式,所述门体旋转打开至A
其中,0°<A
作为本申请的一种实施方式,所述第一轨迹线S所在直线与所述第二轨迹线K相交于第一导向点Q
作为本申请的一种实施方式,所述门体打开至A
作为本申请的一种实施方式,在门体处于关闭状态时,所述第一铰链轴的中心轴位于所述第一轨迹线S的第一定位端点P
与现有技术相比,本发明的优点和积极效果在于:
本发明提出一种冰箱,其包括箱体、门体、具有第一铰链轴和第二铰链轴的铰链;门体具有门前壁和门侧壁;门体靠近铰链的端部设有均呈直线型的第一轨迹槽和第二轨迹槽;第一铰链轴与第一轨迹槽相配合,第二铰链轴与第二轨迹槽相配合;门体由第一角度打开至A
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明冰箱的立体图;
图2是本发明冰箱的俯视图;
图3是图2的局部结构示意图;
图4是本发明冰箱的右上角的铰链的分解结构示意图;
图5是本发明冰箱的第一轨迹槽、第二轨迹槽的相对位置视图;
图6是本发明冰箱的实施例一的第一铰链轴及第二铰链轴的运动情况示意图;
图7是本发明冰箱的实施例一中门体处于关闭状态时铰链处的视图;
图8是本发明冰箱的实施例一中门体打开至A
图9是本发明冰箱的实施例一中门体打开至A
图10是本发明冰箱的实施例一中门体打开至90°时铰链处的视图;
图11是本发明冰箱的实施例一中门体打开至A
图12是本发明冰箱的实施例一中设置第三定位点P
图13是本发明冰箱的实施例二的第一铰链轴及第二铰链轴的运动情况示意图;
图14是本发明冰箱的实施例二中门体处于关闭状态时铰链处的视图;
图15是本发明冰箱的实施例二中门体打开至A
图16是本发明冰箱的实施例二中门体打开至A
图17是本发明冰箱的实施例二中门体打开至90°时铰链处的视图;
图18是本发明冰箱的实施例二中门体打开至A
图19是本发明冰箱的实施例二中设置第三定位点P
图20是本发明冰箱的实施例三的第一铰链轴及第二铰链轴的运动情况示意图;
图21是本发明冰箱的实施例三中门体处于关闭状态时铰链处的视图;
图22是本发明冰箱的实施例三中门体打开至A
图23是本发明冰箱的实施例三中门体打开至90°时铰链处的视图;
图24是本发明冰箱的实施例三中门体打开至A
图25是本发明冰箱的实施例三中设置第三定位点P
图26是本发明冰箱的实施例四门体处于关闭状态时时铰链处各参数表示的视图;
图27是本发明冰箱的实施例四门体打开角度m∈(0,γ+n]时铰链处各参数表示的视图;
图28是本发明冰箱的实施例四打开角度m=γ+n时铰链处各参数表示的视图;
图29是本发明冰箱的实施例四门体打开角度m∈(γ+n,2(γ+n)]时铰链处各参数表示的视图;
图30是本发明冰箱的实施例四的m=2(γ+n)时铰链处各参数表示的视图。
以上各图中:箱体10;储藏室20;橱柜100;门体30;门前壁31;门侧壁32;侧棱33;铰链板40;连接部401;延伸部402;第一铰链轴41;第二铰链轴42;定位中心轴P;导向中心轴Q;第一轨迹槽50;第一轨迹线S;第一定位端点P
具体实施方式
下面,通过示例性的实施方式对本发明进行具体描述。然而应当理解,在没有进一步叙述的情况下,一个实施方式中的元件、结构和特征也可以有益地结合到其他实施方式中。
在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
术语“第一”、“第二”、“第三”、“第四”、“第五”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”、“第四”、“第五”的特征可以明示或者隐含地包括一个或者更多个该特征。
在下文中,将参照附图详细描述本申请的实施方式。在附图中,定义冰箱使用时面向用户的一侧为前侧,与之相反的一侧为后侧。
实施例一
参照图1,冰箱包括具有储藏室20的箱体10、连接到箱体10以打开和关闭储藏室20的门体30,以及向储藏室20供应冷空气的制冷装置。
具体的,制冷装置可以包括蒸发器、压缩机、冷凝器和膨胀装置,并且可以通过使用制冷剂的蒸发潜热来产生冷空气。箱体10包括限定形成储藏室20的内胆、连接到内胆的外侧以形成冰箱的外观的外壳、设置于在内胆与外壳之间以使储藏室20绝热的隔热层。
箱体10限定出多个储藏室20。本实施例中,多个储藏室20包括位于冷藏室及位于冷藏室下方的冷冻室;作为一种可设置的方式,冷藏室用于通过将空气保持在约0至5℃的温度而以冷藏模式储藏食物;冷冻室用于通过将空气保持在0至-30℃的温度而以冷冻模式储藏食物。需要说明的是,冰箱的多个储藏室20的设置不局限于以上示例说明。
储藏室20的前端形成有取放口以放置食物至储藏室20内或由储藏室20内取出食物;箱体10上设置可旋转的门体30以打开或关闭储藏室20的取放口。具体的,门体30由位于上部的铰链和位于下部的铰链可旋转地连接于箱体10上。
箱体10包括相对设置的第一体侧壁和第二体侧壁(即箱体10的左侧壁和右侧壁);铰链设置于箱体10上并靠近第一体侧壁;门体30具有在门体30关闭时远离箱体10的门前壁31、靠近铰链且与门前壁31相连接的门侧壁32;例如铰链位于箱体10的右侧时,门体30的右侧面为门侧壁32;铰链位于箱体10的左侧时,门体30的左侧面为门侧壁32。门体30的门前壁31和门侧壁32相交形成侧棱33。
参照图2至图5,铰链具有第一铰链轴41、位于第一铰链轴41远离第一体侧壁一侧的第二铰链轴42;门体30靠近铰链的端部设有第一轨迹槽50和第二轨迹槽60;第一铰链轴41适配于第一轨迹槽50,第二铰链轴42适配于第二轨迹槽60,在门体30旋转打开或者关闭的过程中,第一铰链轴41相对第一轨迹槽50运动,第二铰链轴42相对第二轨迹槽60运动。
在此,需要说明的是,本申请实施例仅以上述设置第一铰链轴41和第二铰链轴42设于铰链上,第一轨迹槽50和第二轨迹槽60设置于门体30上为例;但第一铰链轴41、第二铰链轴42、第一轨迹槽50、第二轨迹槽60的设置不局限于以上门体30或门体30上的设置配合。第一铰链轴41与第一轨迹槽50相配合,其中一个设置于门体30上,另一个设置于铰链上即可;相配合的第二铰链轴42和第二轨迹槽60设置同理。其原理相同,仅在于位置设置的不同,为常规设置不再具体说明。
铰链包括与箱体10固定连接的铰链板40,铰链板40包括:连接到箱体10上的连接部401、从连接部401向前延伸并具有水平的板状的延伸部402。连接部401可以通过诸如螺钉、销和螺栓等紧固件紧固到箱体10顶壁。
具体的,对于门体30上端的铰链来说,包括连接在箱体10上端的铰链板40,第一铰链轴41和第二铰链轴42连接在铰链板40上以形成旋转轴。铰链板40、第一铰链轴41和第二铰链轴42可以一体地形成,但是与此不同,铰链板41、第一铰链轴41和第二铰链轴42可以被分开提供并彼此组装。其中,第一铰链轴41和第二铰链轴42形成在延伸部402上,并竖直向下延伸。
对于门体30下端的铰链来说,连接部401连接在箱体10的前端面。第一铰链轴41和第二铰链轴42在铰链板40上向上延伸。
对应于铰链板40的位置,门体30的上下两端均设有第一轨迹槽50和第二轨迹槽60。且门体30上下两端的两个第一轨迹槽50在竖直方向的位置相对应,两个第二轨迹槽60在竖直方向的位置相对应。即在箱体10的顶壁所在平面内的投影中,门体30上下两端的两个第一轨迹槽50的中心线投影完全重合,门体30上下两端的两个第二轨迹槽60的中心线投影完全重合。
本实施例中,继续参照图2,将箱体10上靠近铰链板40的侧面所在的平面定义为基准平面M,冰箱收容于橱柜100中,基准平面M靠近橱柜100的一侧为外侧,与之相对的靠近储藏室20的一侧为内侧。将冰箱放置在橱柜100中使用时,为了防止用户地面不平及橱柜100变形等因素,橱柜100在尺寸设置时,橱柜100与冰箱的侧面(即第一体侧壁为基准平面M)的距离α=5mm。为了保证冰箱的门体30正常打开,门体30在旋转的过程中其侧棱33不能超出箱体10侧面(基准平面M)太多,以避免侧棱33与橱柜100碰撞而导致门体30无法正常打开。
为满足以上需求,门体30在旋转的过程需要能向内侧移动,从而使得侧棱33不会超出箱体10侧面(基准平面M)太多。以链板40设在门体30右侧(在此例中,箱体10的左侧壁为第一体侧壁)为例,内侧为左侧,即门体30需要能向左侧移动;以铰链板40在门体30为例,内侧为右侧,即门体30需要能向右侧移动。
本实施例中,第一轨迹槽50和第二轨迹槽60各自均呈直线型;即,第一轨迹槽50和第二轨迹槽60均仅由一段直线型槽构成。第一铰链轴41与第一轨迹槽50相配合,第二铰链轴42与第二轨迹槽60相配合。其中,第一轨迹槽50的中心轨迹线记为第一轨迹线S,第二轨迹槽60的的中心轨迹线记为第二轨迹线K。由第一轨迹槽50与第二轨迹槽60由一段直线槽构成的形状所限定,第一轨迹线S为直线,第二轨迹线K亦为直线。其中,第一轨迹线S由远离门前壁31和门侧壁32的一侧向靠近门前壁31和门侧壁32的一侧沿直线延伸;第二轨迹线K由靠近门前壁31并远离门侧壁32的一侧向远离门前壁31并靠近门侧壁32的一侧沿直线延伸,且第一轨迹线S位于第二轨迹线K靠近门前壁31和门侧壁32的一侧,以使得门体30能够在旋转的同时向内侧(靠近第二体侧壁)的方向移动一段距离,从而避免门体30打开时与橱柜100相互干涉。以上设置第一轨迹槽50与第二轨迹槽60,充分利用门体30的厚度,避免因需要门体30打开时内移而设置第一轨迹槽50和第二轨迹槽60而增加门体30的厚度。
由于第一轨迹槽50和第一铰链轴41之间,以及第二轨迹槽60和第二铰链轴42之间是相对运动关系,若门体30在打开的过程中,以第一轨迹槽50和第二轨迹槽60为静止参照物,则相当于第一铰链轴41在第一轨迹槽50内移动,第二铰链轴42在第二轨迹槽60内移动。本申请为了描述方便,采用第一轨迹槽50和第二轨迹槽60为参照物,而第一铰链轴41和第二铰链轴42相对参照物移动的方式进行说明。
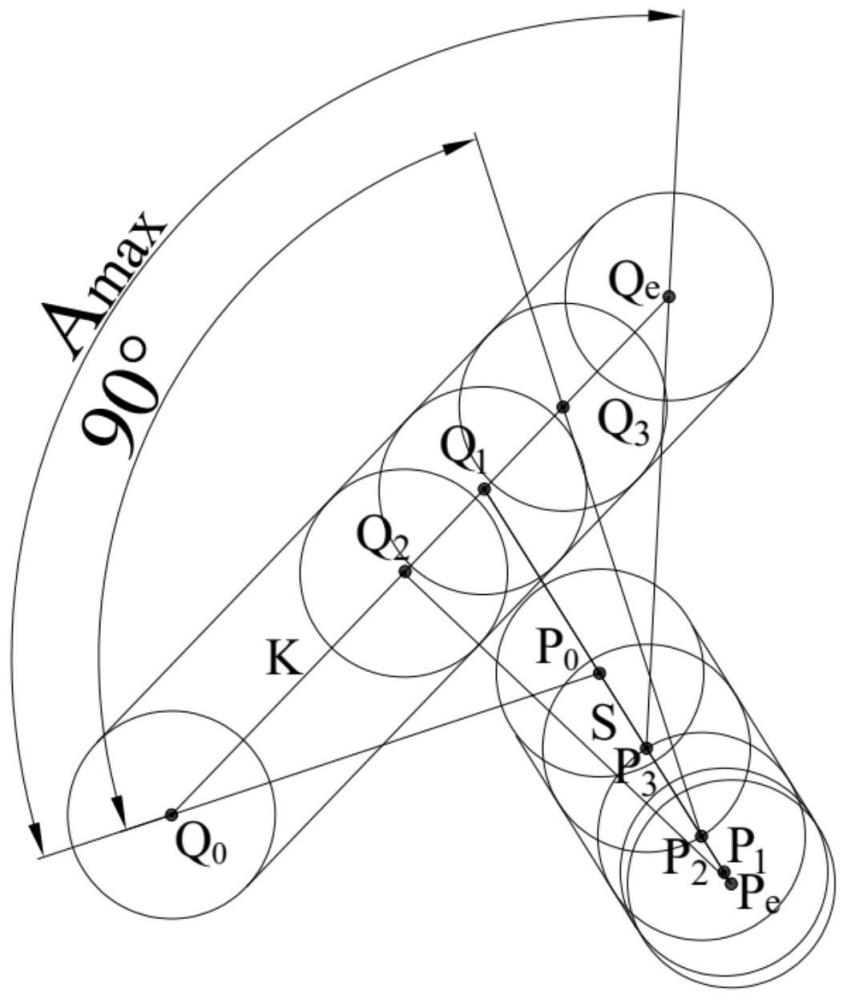
另外,本实施例中,第一铰链轴41的中心轴记为定位中心轴P,第二铰链轴42的中心轴为导向中心轴Q。如图6-图12所示,第一铰链轴41沿第一轨迹槽50运动等同于定位中心轴P沿第一轨迹线S运动,第二铰链轴42沿第二轨迹槽60运动等同于导向中心轴Q沿第二轨迹线K运动,以使得门体30能够在旋转的同时向内侧(靠近第二体侧壁)的方向移动一段距离,从而避免门体30打开时与橱柜100相互干涉。
如图6-图12所示,第一轨迹线S包括远离门侧壁32的第一定位端点P
第二轨迹线K包括远离门侧壁32的第一导向端点Q
如图7所示,在申请的一些实施例中,在门体30处于关闭状态时,第一铰链轴41的中心轴(定位中心轴P)位于第一轨迹线S的第一定位端点P
结合图5,此时,第一铰链轴41和第二铰链轴42在垂直于门前壁31方向的垂向距离记为L
在一些实施例中,门体30处于关闭状态时第二铰链轴42与第二轨迹槽60的端壁之间具有一定的间隙δ>0(图中未示出),使得门体30在被用力摔向箱体10时防止第二铰链轴42与第二轨迹槽60的第一起始端接触而将门体30弹开。
参见图6-图11,第一轨迹线S所在直线与第二轨迹线K相交于第一导向点Q
本实施例中以设定∠Q
如图7所示,在门体30处于关闭状态(打开0°)时,第一铰链轴41的中心轴(定位中心轴P)位于第一轨迹线S远离门侧壁32的第一定位端点P
如图8所示,门体旋转打开至A
如图9所示,门体30旋转打开至A
如图10所示,门体30打开至90°时,第一铰链轴41的中心轴(定位中心轴P)位于第一轨迹线S的第二定位点P
如图11所示,门体30打开至A
其中,0°<A
具体的,如图8所示,门体30由关闭状态旋转打开至A
如图9所示,门体30由A
如图10所示,门体30由A
如图11所示,门体30由90°旋转打开至A
本实施例中,如图6所示,以第一轨迹槽50和第二轨迹槽60为参照物,第一铰链轴41的中心轴(定位中心轴P)与第二铰链轴42的中心轴(导向中心轴Q)的连线先沿顺时针方向旋转A
即若以第一铰链轴41与第二铰链轴42为参照物,第一轨迹槽50和第二轨迹槽60整体先沿逆时针方向旋转A
本实施例中,第二定位端点P
以上实施例中,第三定位点P
在当前示例中,冰箱设置于橱柜100内时门体30可以开启至最大角度A
实施例二
如图13-图19所示,本实施例二与实施例一的设置原理相同,其区别在于,本实施例中设定∠Q
如图14所示,在门体30处于关闭状态(打开0°)时,第一铰链轴41的中心轴(定位中心轴P)位于第一轨迹线S远离门侧壁32的第一定位端点P
如图15所示,门体30旋转打开至A
如图15所示,门体旋转打开至A
如图17所示,门体30打开至90°时,第一铰链轴41的中心轴(定位中心轴P)位于第一轨迹线S的第二定位点P
如图18所示,门体30打开至A
其中,0°<A
具体的,如图15所示,门体30由关闭状态旋转打开至A
如图16所示,门体30由A
如图17所示,门体30由A
如图18所示,门体30由90°旋转打开至A
本实施例中,如图13所示,以第一轨迹槽50和第二轨迹槽60为参照物,第一铰链轴41的中心轴(定位中心轴P)与第二铰链轴42的中心轴(导向中心轴Q)的连线先沿顺时针方向旋转A
即若以第一铰链轴41与第二铰链轴42为参照物,第一轨迹槽50和第二轨迹槽60整体先沿逆时针方向旋转A
本实施例中,第二定位端点P
综上,本实施例中∠Q
本实施例中,第三定位点P
在当前示例中,冰箱设置于橱柜100内时门体30可以开启至最大角度A
实施例三
如图20-图25所示,本实施例三与实施例一和实施例二的设置原理相同,其区别在于,本实施例中设定∠Q
如图21所示,在门体30处于关闭状态(打开0°)时,第一铰链轴41的中心轴(定位中心轴P)位于第一轨迹线S远离门侧壁32的第一定位端点P
如图22所示,门体30旋转打开至A
如图23所示,门体30打开至90°时,第一铰链轴41的中心轴(定位中心轴P)位于第一轨迹线S的第二定位点P
如图24所示,门体30打开至A
其中,0°<A
具体的,如图22所示,门体30由关闭状态旋转打开至A
如图23所示,门体30由A
如图24所示,门体30由90°旋转打开至A
本实施例中,如图20所示,以第一轨迹槽50和第二轨迹槽60为参照物,第一铰链轴41的中心轴(定位中心轴P)与第二铰链轴42的中心轴(导向中心轴Q)的连线先沿顺时针方向旋转A
即若以第一铰链轴41与第二铰链轴42为参照物,第一轨迹槽50和第二轨迹槽60整体先沿逆时针方向旋转A
第二定位端点P
以上实施例中,第三定位点P
在当前示例中,冰箱设置于橱柜100内时门体30可以开启至最大角度A
综上,本申请实施例一至实施例三中,参见图10、图17、图23,当门体30处于90°打开状态时,门体30的门前壁31或侧棱33与箱体10的第一体侧壁(基准平面M)具有间隙θ,也就是说,门体30的门前壁31位于基准平面M的内侧且门前壁31到基准平面M的距离为θ>0,使得门体30可继续打开小角度而不会与橱柜100干涉。
作为另一种可实施的方式,通过缩短第二轨迹槽60的长度,使第二轨迹线K的第三导向点Q
需要说明的是,各实施例中门体打开角度A
实施例四
在本申请的实施例中,门体30在打开的过程中,围绕变动的点在转动,且该变动点有迹可寻,其轨迹为(X=(X1+X2)/2,Y=(Y1+Y2)/2);
其中:X代表变动点距门侧壁32的距离,Y代表变动点距门前壁31的距离。
X1代表门体30旋转打开时第一铰链轴41在第一轨迹槽50内的中心点距门体30门侧壁32的距离;X2代表门体30旋转打开时第二铰链轴42在第二轨迹槽60内的中心点距离门体30门侧壁32的距离;
Y1代表门体30旋转打开时第一铰链轴41在第一轨迹槽50内的中心点距门体30门前壁31的距离;Y2门体30旋转打开时第二铰链轴42在第二轨迹槽60内的中心点距门体30门前壁31的距离。
具体参照图26-图30,同实施例一,第一轨迹槽50的中心轨迹线记为第一轨迹线S,第二轨迹槽60的的中心轨迹线记为第二轨迹线K;第一铰链轴41的中心轴记为定位中心轴P,第二铰链轴42的中心轴为导向中心轴Q,对应于图26-图30的箱体10顶壁所在平面投影中,点P代表定位中心轴P,点Q代表导向中心轴Q。
在门体30处于关闭状态时,参见图26,第一铰链轴41的中心轴(定位中心轴P)位于第一轨迹线S的定位起始点P
参见图26,①在门体30关闭状态,即m=0°:
定位中心轴P:X1=a;Y1=b;
导向中心轴Q:X2=a+L*COSn;Y2=b-L*SINn。
定位中心轴P距第二轨迹线K的距离为:L*COS(γ+n);
导向中心轴Q距第一轨迹线S的距离为:L*SIN*(γ+n)。
参见图27,②当所述门体的旋转角度为m,0≤m≤γ+n时:
定位中心轴P距离第二轨迹线K的距离为:L*COS(γ+n-m),
定位中心轴P沿第一轨迹线S移动的距离为:
K1=L*COS(γ+n-m)-L*COS(γ+n),
导向中心轴Q沿第二轨迹线K移动的距离为:
K2=L*SIN(γ+n)-L*SIN(γ+n-m)。
定位中心轴P:
X1=a-COSγ*K1;Y1=b-SINγ*K1;
导向中心轴Q:
X2=a+L*COSn-SINγ*K2;Y2=b-L*SINn+COSγ*K2。
参见图28,当m=γ+n时,导向中心轴Q位于第一轨迹线S的延长线上,此时定位中心轴P至第二轨迹线K的距离为L;
定位中心轴P沿第一轨迹线S移动的距离为:K1=L-L*COS(γ+n)
如实施例一中设置∠Q
如实施例二中设置∠Q
如实施例三中设置第一轨迹线S与第二轨迹线K相垂直,则此时,K1等于第一轨迹线S的长度;
导向中心轴Q沿第二轨迹线K移动的距离为:K2=L*SIN(γ+n)。
参见图29,③当所述门体的旋转角度为m,γ+n≤m≤2(γ+n)时:
定位中心轴P距离第二轨迹线K的距离为:L*COS(m-γ-n);
定位中心轴P沿第一轨迹线S移动的距离为:
K1=L*COS(m-γ-n)-L*COS(γ+n);
导向中心轴Q沿第二轨迹线K移动的距离为:
K2=L*SIN(γ+n)+L*SIN(m-γ-n)。
定位中心轴P:
X1=a-COSγ*K1;Y1=b-SINγ*K1;
导向中心轴Q:
X2=a+L*COSn-SINγ*K2;Y2=b-L*SINn+COSγ*K2。
当K1=0时,定位中心轴P回到初始点,可求此时m=2(γ+n),K2=2L*SIN(γ+n)(K2此时为第二轨迹线K的长度)。
即,参见图30,当m=2(γ+n)时,K1=0,定位中心轴P回到第一轨迹线S的初始点P
本申请实施例一至实施例四中,当门体30由关闭状态(0°)旋转打开至A
其中,门体30由关闭状态打开至第一角度(第一角度小于90°,如实施例一中第一角度为A
门体30由第一角度(小于90°)打开至最大角度A
本申请实施例一至实施例四中,门体30由关闭状态开启至最大角度A
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。