一种移动机器人行驶路径点预测方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明属于移动机器人技术领域,尤其涉及一种移动机器人行驶路径点预测方法及系统。
背景技术
随着经济的发展和机器人技术的不断进步,各式各样的移动机器人已经应用在各行各业中,移动机器人的行驶路径规划是研究的重点。在复杂的城市交通道路中,规划移动机器人行驶路径的前提是需要对交通流量进行准确的预测。以往的许多交通流预测方法都是采用物理模型或者基于单一道路来进行时序预测。基于物理模型驱动的预测方法在建模过程中设置了许多变量和假设,计算过程繁琐,复用性不高。而基于单一道路的时序预测只关注了时间维度上的特征提取,而忽略了道路与道路之间存在的空间拓扑关系,因此采用时空模型能有效地弥补时序预测的不足,提高预测的精度。但是由于时空模型需要同时提取时间维度与空间维度特征,其模型较大,参数较多,导致计算的时间复杂度与空间复杂度都比较高。
发明内容
本发明的目的在于提供一种移动机器人行驶路径点预测方法。旨在解决使用时空模型对移动机器人进行路径点预测时,需要同时提取时间维度与空间维度特征,导致时空模型较大,参数较多,计算的时间复杂度与空间复杂度都比较高的问题。
一方面,本发明提供了一种移动机器人行驶路径点预测方法,所述方法包括以下步骤:
步骤一、对近N天的历史交通流时空数据进行编码,获得第一编码,将所述第一编码作为编码器的输入;
步骤二、依次通过时间特征提取模块和空间特征模块对所述编码器的输入分别进行时间维度特征提取和空间维度特征提取,获得编码器的输出,所述时间特征提取模块包括ProbSparse自注意力机制、一维卷积层和最大池化层;所述空间特征提取模块包括ProbSparse自注意力机制和GCN图卷积层;
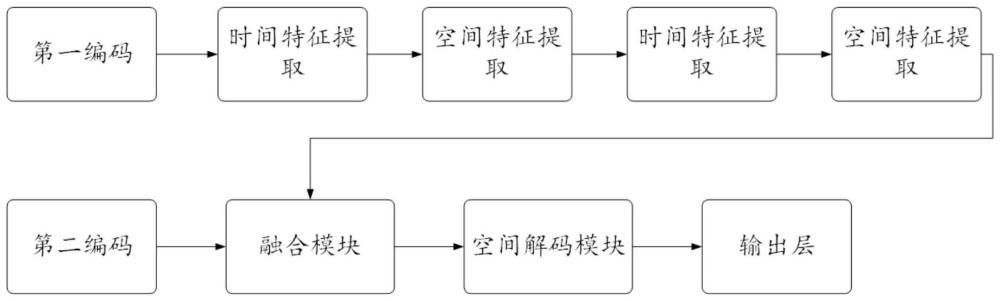
步骤三、按照所述步骤一的编码方式对最近M(M 步骤四、将所述编码器的输出和所述第二编码输入到融合模块,对所述第二编码进行一次自注意力计算得到中间结果,将所述编码器的输出与所述中间结果进行自注意力计算,得到融合模块的输出; 步骤五、通过空间解码模块对所述融合模块的输出进行空间解码,所述空间解码模块的计算流程同所述步骤二中所述空间特征提取模块的计算流程; 步骤六、将所述空间解码模块的输出经过以一维卷积层和全连接层组成的输出层,获得目标时间步的各节点交通流预测结果,从前几个距离最短路径中根据交通流量总和的最小值选择移动机器人行驶的最佳路径。 进一步地,所述ProbSparse自注意力机制采用KL散度来衡量自注意力分布与均匀分布的相似性,筛选出相似度低的点积对分布,对于接近均匀分布的点积对则直接平均相加,ProbSparse自注意力机制的计算公式如下所示: Q=W 其中,X为输入,d为特征向量长度, 进一步地,在所述空间特征提取模块中,利用节点间的半正弦距离与归一化后的自注意力系统进行加权相加最后再归一化形成关系矩阵,将关系矩阵代替GCN图卷积模型中的邻接矩阵进行节点特征的更新计算,关系矩阵A的计算过程如下所示: 其中E为节点距离矩阵,λ为平衡系数,该矩阵中的元素节点距离权重e 其中x 进一步地,还包括在所述步骤二中重复进行一次时间特征提取和空间特征提取。 所述空间特征提取模块中,采用GCN图卷积模型进行节点特征更新,其中的邻接矩阵采用关系矩阵来代替,关系矩阵A的计算过程如下所示: 其中E为节点距离矩阵,λ为平衡系数,该矩阵中的元素节点距离权重e 其中x 进一步地,还包括在所述步骤二之后再将其重复进行一次。 进一步地,所述编码包括投影编码、位置编码和时间编码,所述第一编码由三个所述编码分别经过线性变换得到相同的矩阵大小后相加而成。 进一步地,所述时间编码由分钟-小时占比、小时-天占比、天-星期占比、天-月占比、天-年占比这5个计算数值获得。 进一步地,所述投影编码采用一维卷积获得。 进一步地,所述位置编码采用正弦余弦编码方式获得。 另一方面,本文还提供了一种移动机器人行驶路径点预测系统,所述系统包括: 编码模块,用于分别对近N天历史交通流时空数据的和最近M(M 特征提取模块,用于提取编码器的输入的时间维度的特征和空间维度的特征以获得编码器的输出,包括时间特征提取模块和空间特征提取模块,所述时间特征提取模块包括ProbSparse自注意力机制、一维卷积层和最大池化层;所述空间特征提取模块包括ProbSparse自注意力机制和GCN图卷积层; 融合模块,用于将所述编码器输出和所述第二编码输入融合模块,对所述第二编码进行一次自注意力计算得到中间结果,将所述编码器输出与所述中间结果进行自注意力计算,得到融合模块输出; 空间解码模块,用于对所述融合模块输出进行空间解码,所述空间解码模块的计算流程同所述空间特征提取模块的计算流程; 输出模块,用于将所述空间解码模块输出经过以一维卷积层和全连接层组成的输出层,获得目标时间步的各节点交通流预测结果,从前几个距离最短路径中根据交通流量总和的最小值选择移动机器人行驶的最佳路径。 本发明的有益效果:本发明针对移动机器人在使用时空模型进行行驶路径点预测中,由于需要同时提取时间维度与空间维度特征的时空模型较大,参数较多,计算的时间复杂度与空间复杂度都比较高的问题,提出了一种移动机器人点预测方法及系统。在本发明中,通过在时间特征提取模块和空间特征提取模块中引入了ProbSparse自注意力机制,在ProbSparse自注意力机制中采用KL散度来衡量自注意力分布与均匀分布的相似性,筛选出相似度低的点积对分布,对于接近均匀分布的点积对直接平均相加,可以降低计算的时间复杂度与空间复杂度,解决了计算的时间复杂度和空间复杂度较高的问题。另外,本发明在对交通流时空数据进行编码时,采用了投影编码、位置编码和时间编码,这三种编码方式让模型在自注意力机制与后续特征提取模块中能结合时间戳和数据的相对位置更有针对性地对输入与输出之间的关系进行建模,将时间信息与距离信息更好地融合进模型中。 附图说明 图1是本发明实施例1提供移动机器人行驶路径点预测方法的流程图; 图2是本发明实施例1提供移动机器人行驶路径点预测方法中时间特征提取模块的结构示意图; 图3是本发明实施例1提供移动机器人行驶路径点预测方法中空间特征提取模块的结构示意图; 图4是本发明实施例2提供的移动机器人行驶路径点预测系统的示意图。 具体实施方式 为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。 以下结合具体实施例对本发明的具体实现进行详细描述: 图1示出了本发明实施例提供的移动机器人行驶路径点预测方法的实现流程,为了便于说明,仅示出了与本发明实施例1相关的部分,详述如下: 步骤S1、对近7天的历史交通流时空数据进行编码,获得第一编码,将第一编码作为编码器的输入。 进一步地,编码包括投影编码、位置编码和时间编码,第一编码由三个编码分别经过线性变换得到相同的矩阵大小后相加而成。三种编码方式让模型在自注意力机制与后续特征提取模块能结合时间戳和数据相对位置来更有针对性地对输入与输出之间的关系进行建模,也有助于将时间信息和距离信息更好地融入到模型中。 进一步地,在时间编码中,根据每一个时间步的时间戳计算以下的5个数值:分钟-小时占比、小时-天占比、天-星期占比、天-月占比、天-年占比,可让模型知道该时间步的全局时间信息,比单纯地通过上午与下午、周末与工作日、四季的区分更加精确,而且也将数值限制在一定的范围。 进一步地,投影编码通过采用一维卷积获得。 进一步地,位置编码通过采用正弦余弦编码方式获得,在自注意力机制中,由于自注意力机制的运算是无向的,所以需要位置编码将位置信息传给模型。 模型的编码器部分由时间特征提取模块和空间特征提取模块构成。 步骤S2、通过时间特征提取模块编码器的输入进行时间维度特征提取,如图2所示,时间特征提取模块依次包括ProbSparse自注意力机制、残差连接归一化层、一维卷积层、残差连接归一化层和最大池化层。 进一步地,ProbSparse自注意力机制采用KL散度来衡量自注意力分布与均匀分布的相似性,筛选出相似度低的点积对分布,对于接近均匀分布的点积对则直接平均相加,以此来降低计算的时间复杂度与空间复杂度,ProbSparse自注意力机制的计算公式如下所示: Q=W 其中,X为输入,d为特征向量长度, 步骤S3、通过空间特征提取模块对编码器的输入进行空间维度特征提取,如图3所示,空间特征提取模块包括ProbSparse自注意力机制、GCN图卷积层和残差连接归一化层。 空间特征提取模块采用了自注意力计算与节点距离系数相结合的方式对节点特征进行更新,具体地说,先利用节点间的半正弦距离与归一化后的自注意力系统进行加权相加,最后再归一化形成关系矩阵,将关系矩阵代替图卷积模型中的邻接矩阵进行节点特征的更新计算。 关系矩阵A的计算过程如下所示: 其中E为节点距离矩阵,λ为平衡系数,该矩阵中的元素节点距离权重e 其中x 步骤S4、再次进入时间特征提取模块和空间特征提取模块得到编码器的输出out1; 步骤S5、按照步骤S1的编码方式对最近1天的交通流时空信息进行编码,获得in1; 步骤S6、将out1和in1输入到融合模块,对in1进行一次自注意力计算得到in2,将out1与in2进行自注意力计算,得到融合模块的输出; 融合模块计算解码器额外历史时间步输入与编码器输出结果之间的注意力系数,来对编码器输出结果进行加权相加,这个操作利用编码器新增的输入信息来给编码器输出结果分配不同的注意力,更好地将额外输入信息与编码器输出结果进行融合。 步骤S7、通过空间解码模块对融合模块的输出进行空间解码,空间解码模块的计算流程同步骤S3中的空间特征提取模块的计算流程; 步骤S8、将空间解码模块的输出经过以一维卷积层和全连接层组成的输出层,获得目标时间步的各节点交通流预测结果,在前几个距离最短路径中根据交通流量总和的最小值选择移动机器人行驶的最佳路径。 如图4所示,本文还提供了一种移动机器人行驶路径点预测系统,该系统由编码器和解码器两部分组成。 其中,编码器部分包括以下模块: 编码模块M1,用于分别对近7天的历史交通流时空数据和近1天的交通流时空数据进行编码,获得第一编码和第二编码; 时间特征提取模块M2,用于提取编码器的输入的时间维度的特征,时间特征提取模块包括ProbSparse自注意力机制、一维卷积层和最大池化层; 空间特征提取模块M3,用于提取编码器的输入的空间维度的特征,空间特征提取模块包括ProbSparse自注意力机制和GCN图卷积层; 解码器部分包括以下模块: 融合模块M4,用于将编码器输出和第二编码输入融合模块,对第二编码进行一次自注意力计算得到中间结果,将编码器输出与中间结果进行自注意力计算,得到融合模块的输出; 空间解码模块M5,用于对融合模块的输出进行空间解码,空间解码模块的计算流程同空间特征提取模块的计算流程; 输出模块M6,用于将空间解码模块输出经过以一维卷积层和全连接层组成的输出层,获得目标时间步的各节点交通流预测结果,从前几个距离最短路径中根据交通流量总和的最小值选择移动机器人行驶的最佳路径。 以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种车辆行驶轨迹点预测的方法
- 一种移动机器人路径行驶控制方法及存储装置
- 一种移动机器人行驶路径动态规划系统及方法