一种基于发散型多线激光投影的三维测量系统及测量方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及一种基于发散型多线激光投影的三维测量系统及测量方法,具体指一种基于激光三角法的非接触式三维测量方法,属于计算机视觉测量技术领域。
背景技术
传统的二维机器视觉技术已经难以满足现代智能制造的需求,三维视觉技术已经成为制造业的一个发展趋势。三维视觉系统利用非接触式的光学成像技术识别待测物体的空间位置和外形,具有测量精度高、速度快、成本低、应用方便灵活等特点,而线激光扫描法就是一种基于激光三角测量原理的非接触式主动光学三维测量方法。通过投影线激光扫描物体表面,可以实现物体表面的三维重构和测量,在提高了企业的生产效率的同时,也可以保证甚至提高产品的质量,对工业自动化生产有着重要意义。系统标定与光条中心线的提取是三维测量精度的关键,直接影响着物体表面三维重构的好坏。
目前,系统标定大多采用二维平面标定板,制作简单、使用方便、应用范围广,而三维立体标定板制造困难、价格昂贵、受测量视场限制,难以适用。传统的工业相机标定和光平面标定大多由一块棋盘格标定板完成,标定板上的黑白方格图案会对激光线产生干扰,不利于后续的光条纹中心线提取。本发明使用两块标定板将工业相机标定与光平面标定分开,其中圆形标定板用于工业相机标定,光平面标定需要结合圆形标定板和白板。圆形标定板相较于棋盘格标定板标定精度更高,白板表面没有任何图案,便于后续的光条纹中心线提取。
目前,光条中心线的提取方法主要有几何中心法、阈值法、极值法、Steger、灰度重心法等,但是这些光条中心线的提取受测量现场的环境影响较大,每种方法的提取精度、提取速度和抗干扰性各有优劣。
发明内容
本发明涉及一种基于发散型多线激光投影的三维测量系统及测量方法,采用基于系统空间结构约束的多线激光条纹中心线提取方法可以实现测量环境较差的情况下的光条纹中心线的快速、精确、稳定的提取,结合系统标定求得的光平面参数方程可以实现快速的三维测量。本发明用于满足如今制造业在视觉测量方面的需求,有效避免了二维机器视觉受外在因素的影响而导致检测不可靠的情况。
本发明采用的技术方案是:一种基于发散型多线激光投影的三维测量系统,包括发散型多线激光器1、工业相机2、自制标定器材、计算机3、工作台4、支架5。其中,自制标定器材包括圆形标定板6、白板7、橡胶磁外壳8和金属平板9,发散型多线激光器1与工业工业相机2固定在支架5上,发散型多线激光器1垂直投影,工业相机2倾斜拍摄且与计算机3相连。非现场系统预标定阶段,金属平板9需放置在工作台4上,圆形标定板6和白板7分别插入橡胶磁外壳8中,橡胶磁外壳8放置在金属平板9上。现场测量阶段,被测物体需放置在工作台4上。
具体地,圆形标定板6和白板7用于系统标定(工业相机2标定和光平面标定)。圆形标定板6用于工业相机2标定,光平面标定需要结合圆形标定板6和白板7。圆形标定板6和白板7均是由硬质PVC材料制成的不透明矩形平板。硬质PVC板具有强度高、硬度大、平整不易变形的特点。圆形标定板6表面附有白底黑圆图案,图案为7×7阵列的黑圆,圆形半径5mm,圆心距13mm。圆形标定板6外形尺寸340×260mm,厚度3mm。白板7表面呈白色且没有任何图案。白板7外形尺寸340×260mm,厚度3mm。
具体地,金属平板9用于保证标定板放置位置保持不变。金属平板9由马氏体型不锈钢制成,具有导磁性,外形尺寸400×400mm,厚度5mm。
具体地,橡胶磁外壳8用于保证采集图像时圆形标定板6和白板7不会发生滑动。橡胶磁是一种硬度低、可塑性好的磁体,广泛应用于电冰箱门封、饮水机门封、磁性黑板等等,吸附力适中,可以吸附在金属平板9的表面。橡胶磁外壳8的侧面有插槽,用于圆形标定板6和白板7插入橡胶磁外壳8内部,插槽截面尺寸261×4mm。非现场系统预标定时,圆形标定板6与白板7需要分别插入橡胶磁外壳8中,放置在金属平板9上。
一种基于发散型多线激光投影的三维测量系统的测量方法,包括以下步骤:
步骤1:首先保持发散型多线激光器1和工业相机2固定在支架5合适的位置,然后金属平板9置于工业相机2视场内,改变金属平板9的位置位置数量(N≥10),每一个位置需要采集两张图像。图像1是在有照明条件下,将插入有圆形标定板6的橡胶磁外壳8放置在金属平板9上所采集的图像;图像2是在无照明条件下,将插入有白板7的橡胶磁外壳8放置在金属平板9上并投射激光线到白板上所采集的图像。
步骤2:对图像1中的特征圆进行边缘检测求取特征圆中心坐标信息,基于张正友平面标定法进行工业相机2标定,得到工业相机2的内外参数;
步骤3:基于Steger多线激光中心线提取方法,对多张图像2上的同一根激光线进行光条中心线提取;
步骤4:将所提取到的中心线像素坐标转换为工业相机2坐标系下的三维坐标;
步骤5:基于随机抽样一致算法(RANSAC算法),对中心线的三维坐标进行光平面拟合,由此可得到光平面的方程,完成光平面的标定;
步骤5:把物体放在恶劣环境进行现场测量时,需将物体放置在工作台4上,向物体表面投影激光线并采集图像,采用基于系统空间结构约束的多线激光条纹中心线提取方法分别对物体表面的光条纹和工作台4表面上的光条纹进行中心线提取;
步骤7:将所提取到的物体表面的中心线上的每一个点与工业相机2坐标连成直线,然后求取直线与对应光平面的交点,即可得到物体表面的中心线在工业相机2坐标系下的三维坐标;
步骤8:根据物体表面中心线的三维坐标,进行三维曲面拟合,得到物体表面所有点的三维坐标;
步骤9:基于随机抽样一致算法(RANSAC算法),对步骤5中所提取到的工作台4表面上的中心线三维坐标进行工作台4平面拟合,计算出工作台4参考平面的三维坐标;
步骤10:求取物体表面中心线的三维坐标到工作台4平面的距离,对物体的三维测量进行精度分析。
所述步骤1采集图像时,首先将圆形标定板6插入橡胶磁外壳8中,将橡胶磁外壳8放置在金属平板9上,拍摄一张用于工业相机2标定的图像,然后取下橡胶磁外壳8,取出圆形标定板6并将白板7插入橡胶磁外壳8中,再放置在金属平板9上,向白板7投影多线激光并拍摄一张用于光平面标定的图像。改变金属平板9的位姿按照上述过程拍摄多次即可完成对系统的标定。在更换圆形标定板6或白板7时,不会改变金属平板9的位置。
所述步骤1和步骤2中,圆形标定板6上的圆形图案由于位置的变换,在工业相机2视角下,所得图案变为了不标准的椭圆。本发明通过对特征圆(即不标准的特征椭圆)进行边缘检测,获取特征圆的边缘信息,由此根据最小二乘法对特征圆进行拟合,获取特征圆的中心坐标信息,再利用张氏平面标定法完成工业相机2的标定。
本发明基于激光三角法垂直入射式设计思路,采用了发散型多线激光器1对物体进行非接触式三维测量,发散型多线激光器1投射在白板7上共有25条激光线,中间位置的激光线的中心位置具有一个光斑。
具体地,所述步骤3和步骤5是根据光平面的特性,同一个光平面照射在不同位置的白板7上的激光线都在这个光平面上,对不同位置的同一根激光线进行光条纹中心线提取,根据提取到的光条纹中心线信息进行平面拟合,即可得到光平面方程,完成光平面的标定。光平面方程如下:
Ax+By+Cz+D=0
式中,A、B、C、D是光平面方程的系数,x、y、z是光条纹中心线在工业相机2坐标系下的三维坐标。
具体地,所述步骤6采用了基于系统空间结构约束的多线激光中心线提取方法,主要包括以下步骤:
Step1:对激光条纹图像进行灰度化和滤波处理,并设置矩形感兴趣区域(ROI),完成对多线激光条纹的任意单线提取;
Step 2:对于Step 1中获得的单线激光条纹进行边缘提取,获取光条纹的边缘像素坐标并求出光条纹像素宽度d。
Step 3:对光条纹的边缘像素横坐标取中值,粗提取光条纹的中心线;
Step 4:计算发散型多线激光器1和光斑在工业相机2坐标系下的三维坐标。多线激光器正中间条纹的强度分布满足高斯分布且为标准正态分布。由此绘制系统空间结构约束(包括激光器和工业相机2空间位置及它们的光轴夹角)并求出每根条纹的偏移系数k,计算公式如下所示:
式中,偏移量b是偏移前光条纹中心线横坐标与偏移后光条纹中心线横坐标之间的差值,偏移系数k是偏移量与同一条纹宽度的比值。
Step 5:将粗提取的光条纹的条纹像素宽度d
b
Step 6:粗提取的光条纹中心线像素横坐标加上偏移量b
其中Step5和Step6中,(u
具体地,所述步骤7中,在对物体进行三维测量时,所采集到的物体表面的激光线图像实际上是在工业相机2视角下,物体表面的激光线在工业相机2图像传感器平面上的投影。所以在进行三维测量和重构时,需要将投影点与工业相机2镜头中心点连线,得到多条直线并与对应的光平面相交,所得交点才是物体表面光条纹中心线的在工业相机2坐标系下的三维坐标。
具体地,所述步骤10中,通过计算物体中心线的三维坐标到工作台4所在平面的距离实现对物体的三维测量的精度分析。
本发明的有益效果是:本发明提供了一种基于发散型多线激光投影的三维测量系统及测量方法,采用发散型多线激光器1对物体进行非接触式三维测量,相较于单线激光器更加方便快捷,相较于多线平行激光器成本低。通过两块标定板将工业相机2标定与光平面标定分开,其中圆形标定板6用于工业相机2标定,白板7用于光平面标定。圆形标定板6相较于棋盘格标定板标定精度更高,白板7表面没有任何图案,不会对后续的光条纹中心线提取产生干扰。采用基于系统空间结构约束的多线激光中心线提取方法可以快速实现测量环境较差的情况下的光条纹中心线提取,完成光平面标定,进而实现三维测量。
附图说明
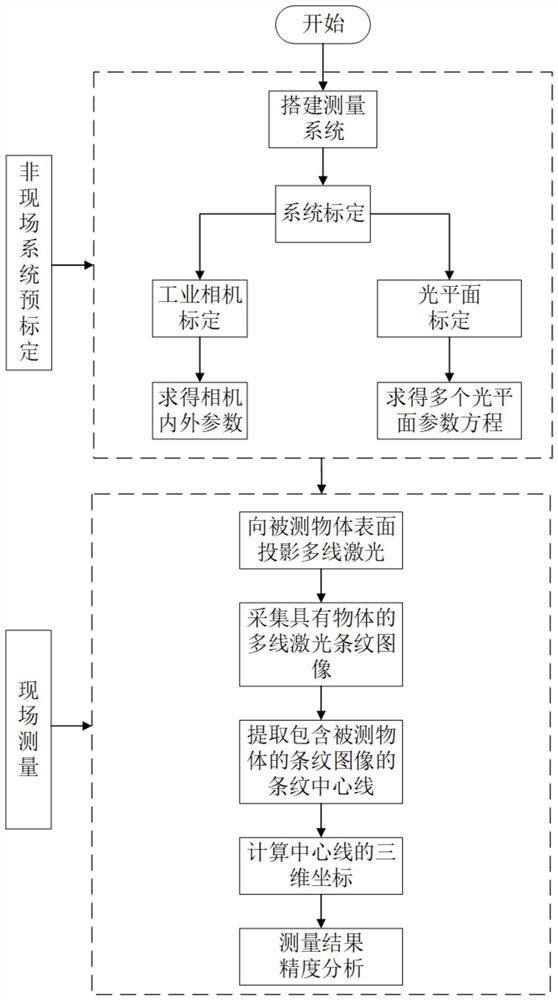
图1为本发明的系统流程图;
图2为本发明的硬件系统框图;
图3为本发明的光平面标定及坐标系示意图;
图4为本发明的圆形标定板与橡胶磁外壳示意图;
图5为本发明的特征圆示意图;
图6为本发明的工业相机标定流程图;
图7为本发明的光平面标定流程图;
图8为本发明的光平面标定原理图;
图9为本发明的三维重构原理图。
图中各标号为:发散型多线激光器-1、工业相机-2、计算机-3、工作台-4、支架-5、圆形标定板-6、白板-7、橡胶磁外壳-8、金属平板-9。
具体实施方式
实施例1:如图1-9所示,一种基于发散型多线激光投影的三维测量系统,包括发散型多线激光器1、工业相机2、自制标定器材、计算机3、工作台4、支架5。其中,自制标定器材包括圆形标定板6、白板7、橡胶磁外壳8和金属平板9,发散型多线激光器1与工业工业相机2固定在支架5上,发散型多线激光器1垂直投影,工业相机2倾斜拍摄且与计算机3相连。非现场系统预标定阶段,金属平板9需放置在工作台4上,圆形标定板6和白板7分别插入橡胶磁外壳8中,橡胶磁外壳8放置在金属平板9上。现场测量阶段,被测物体需放置在工作台4上。
进一步地,圆形标定板6和白板7用于系统标定(工业相机2标定和光平面标定)。圆形标定板6用于工业相机2标定,光平面标定需要结合圆形标定板6和白板7。圆形标定板6和白板7均是由硬质PVC材料制成的不透明矩形平板。硬质PVC板具有强度高、硬度大、平整不易变形的特点。圆形标定板6表面附有白底黑圆图案,图案为7×7阵列的黑圆,圆形半径5mm,圆心距13mm。圆形标定板6外形尺寸340×260mm,厚度3mm。白板7表面呈白色且没有任何图案。白板7外形尺寸340×260mm,厚度3mm。
进一步地,金属平板9用于保证标定板放置位置保持不变。金属平板9由马氏体型不锈钢制成,具有导磁性,外形尺寸400×400mm,厚度5mm。
进一步地,橡胶磁外壳8用于保证采集图像时圆形标定板6和白板7不会发生滑动。橡胶磁是一种硬度低、可塑性好的磁体,广泛应用于电冰箱门封、饮水机门封、磁性黑板等等,吸附力适中,可以吸附在金属平板9的表面。橡胶磁外壳8的侧面有插槽,用于圆形标定板6和白板7插入橡胶磁外壳8内部,插槽截面尺寸261×4mm。非现场系统预标定时,圆形标定板6与白板7需要分别插入橡胶磁外壳8中,放置在金属平板9上。
一种基于发散型多线激光投影的三维测量系统的测量方法,包括以下步骤:
步骤1:首先保持发散型多线激光器1和工业相机2固定在支架5合适的位置,然后金属平板9置于工业相机2视场内,改变金属平板9的位置位置数量(N≥10),每一个位置需要采集两张图像。图像1是在有照明条件下,将插入有圆形标定板6的橡胶磁外壳8放置在金属平板9上所采集的图像;图像2是在无照明条件下,将插入有白板7的橡胶磁外壳8放置在金属平板9上并投射激光线到白板上所采集的图像。
步骤2:对图像1中的特征圆进行边缘检测求取特征圆中心坐标信息,基于张正友平面标定法进行工业相机2标定,得到工业相机2的内外参数;
步骤3:基于Steger多线激光中心线提取方法,对多张图像2上的同一根激光线进行光条中心线提取;
步骤4:将所提取到的中心线像素坐标转换为工业相机2坐标系下的三维坐标;
步骤5:基于随机抽样一致算法(RANSAC算法),对中心线的三维坐标进行光平面拟合,由此可得到光平面的方程,完成光平面的标定;
步骤6:把物体放在恶劣环境进行现场测量时,需将物体放置在工作台4上,向物体表面投影激光线并采集图像,采用基于系统空间结构约束的多线激光条纹中心线提取方法分别对物体表面的光条纹和工作台4表面上的光条纹进行中心线提取;
步骤7:将所提取到的物体表面的中心线上的每一个点与工业相机2坐标连成直线,然后求取直线与对应光平面的交点,即可得到物体表面的中心线在工业相机2坐标系下的三维坐标;
步骤8:根据物体表面中心线的三维坐标,进行三维曲面拟合,得到物体表面所有点的三维坐标;
步骤9:基于随机抽样一致算法(RANSAC算法),对步骤6中所提取到的工作台4表面上的中心线三维坐标进行工作台4平面拟合,计算出工作台4参考平面的三维坐标;
步骤10:求取物体表面中心线的三维坐标到工作台4平面的距离,对物体的三维测量进行精度分析。
进一步地,所述步骤1采集图像时,首先将圆形标定板6插入橡胶磁外壳8中,将橡胶磁外壳8放置在金属平板9上,拍摄一张用于工业相机2标定的图像,然后取下橡胶磁外壳8,取出圆形标定板6并将白板7插入橡胶磁外壳8中,再放置在金属平板9上,向白板7投影多线激光并拍摄一张用于光平面标定的图像。改变金属平板9的位姿按照上述过程拍摄多次即可完成对系统的标定。在更换圆形标定板6或白板7时,不会改变金属平板9的位置。
进一步地,所述步骤1和步骤2中,圆形标定板6上的圆形图案由于位置的变换,在工业相机2视角下,所得图案变为了不标准的椭圆。本发明通过对特征圆(即不标准的特征椭圆)进行边缘检测,获取特征圆的边缘信息,由此根据最小二乘法对特征圆进行拟合,获取特征圆的中心坐标信息,再利用张氏平面标定法完成工业相机2的标定。
进一步地,基于激光三角法垂直入射式设计思路,采用了发散型多线激光器1对物体进行非接触式三维测量,发散型多线激光器1投射在白板7上共有25条激光线,中间位置的激光线的中心位置具有一个光斑。
进一步地,所述步骤3和步骤5是根据光平面的特性,同一个光平面照射在不同位置的白板7上的激光线都在这个光平面上,对不同位置的同一根激光线进行光条纹中心线提取,根据提取到的光条纹中心线信息进行平面拟合,即可得到光平面方程,完成光平面的标定。光平面方程如下:
Ax+By+Cz+D=0
式中,A、B、C、D是光平面方程的系数,x、y、z是光条纹中心线在工业相机2坐标系下的三维坐标。
进一步地,所述步骤6采用了基于系统空间结构约束的多线激光中心线提取方法,主要包括以下步骤:
Step1:对激光条纹图像进行灰度化和滤波处理,并设置矩形感兴趣区域(ROI),完成对多线激光条纹的任意单线提取;
Step 2:对于Step 1中获得的单线激光条纹进行边缘提取,获取光条纹的边缘像素坐标并求出光条纹像素宽度d。
Step 3:对光条纹的边缘像素横坐标取中值,粗提取光条纹的中心线;
Step 4:计算发散型多线激光器1和光斑在工业相机2坐标系下的三维坐标。多线激光器正中间条纹的强度分布满足高斯分布且为标准正态分布。由此绘制系统空间结构约束(包括激光器和工业相机2空间位置及它们的光轴夹角)并求出每根条纹的偏移系数k,计算公式如下所示:
式中,偏移量b是偏移前光条纹中心线横坐标与偏移后光条纹中心线横坐标之间的差值,偏移系数k是偏移量与同一条纹宽度的比值。
Step 5:将粗提取的光条纹的条纹像素宽度d
b
Step 6:粗提取的光条纹中心线像素横坐标加上偏移量b
其中Step5和Step6中,(u
进一步地,所述步骤7中,在对物体进行三维测量时,所采集到的物体表面的激光线图像实际上是在工业相机2视角下,物体表面的激光线在工业相机2图像传感器平面上的投影。所以在进行三维测量和重构时,需要将投影点与工业相机2镜头中心点连线,得到多条直线并与对应的光平面相交,所得交点才是物体表面光条纹中心线的在工业相机2坐标系下的三维坐标。
进一步地,所述步骤10中,通过计算物体中心线的三维坐标到工作台4所在平面的距离实现对物体的三维测量的精度分析。
本发明的工作原理是:
一种基于发散型多线激光投影的三维测量系统及测量方法,工业相机标定中特征点坐标提取的原理:圆形标定板上的圆形图案,在工业相机视角下由于位置的变换,所拍摄到的图案变为了不标准的椭圆,所以必须对标准椭圆进行旋转处理。
标准椭圆方程为
b
其中(x
(x-x
+(x-x
其中(x
本发明基于拉普拉斯算子对特征圆进行边缘检测,将所提取到的边缘信息根据最小二乘准则拟合为最合适的椭圆。
设M
一种基于发散型多线激光投影的三维测量技术,系统标定涉及到世界坐标系、图像坐标系和工业相机坐标系。光条中心线提取到的信息是中心线在图像坐标系下的像素坐标,然后需要将像素坐标转化为工业相机坐标系下的三维坐标。
光平面标定时依据光平面的特性:同一个光平面照射在不同位置的白板上的激光线都在这个光平面上。对不同位置的同一根激光线进行光条纹中心线提取,基于RANSAC算法,对提取到的光条纹中心线信息进行平面拟合,即可得到光平面方程,完成光平面的标定。
一种基于发散型多线激光投影的三维测量技术,采用了基于系统空间结构约束的多线激光中心线提取方法。对多线激光条纹图像中的激光线进行滤波处理和边缘提取,设置感兴趣区域(ROI),完成对多线激光条纹的单线提取,计算光条纹的像素宽度并粗提取光条纹的像素中心线。根据工业相机标定结果计算出在工业相机坐标系下的光条纹宽度、发散型多线激光器发射的光平面交点的坐标和发散型多线激光器照射到物体上的光斑中心坐标,结合激光的高斯分布特性求得系统空间结构约束中的中心线偏移量b和偏移系数k。结合光条纹的像素宽度和中心线偏移系数k,即可完成光条纹中心线的精确提取。
在对物体进行三维测量时,所采集到的物体表面的激光线实际上是在工业相机视角下,物体表面的激光线在工业相机传感器平面上的投影。所以在进行三维测量和重构时,需要将投影点与工业相机点连线,得到多条直线并与对应的光平面相交,所得交点才是物体表面光条纹中心线的在工业相机坐标系下的三维坐标。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,例如25线发散型多线激光器,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种基于发散型多线激光投影的三维测量系统及测量方法
- 一种基于发散型多线激光投影的三维测量系统及测量方法