一种无人机载自动定位线夹X光检测系统
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及电力检测技术领域,具体为一种无人机载自动定位线夹X光检测系统。
背景技术
目前,随着X射线无损检测技术广泛应用到线路导线、耐张线夹、金具等检测中,通过及时排查线路导线、线夹和金具等内部缺陷和隐患,对输电线路的安全稳定运行提供保障。。
无人机自主检测是在人工设定飞行航线后,飞控人员一次性发出指令,无人机按指令自主出发、自主检测、自主返回降落。智能无人机X射线检测作业需要三步。第一步,建立厘米级精度的三维点云地图。即通过激光雷达获取线路走廊内的高精度三维点云作为基础三维地图,随后使用AI算法自动识别提取关键特征(杆塔、导线、绝缘子等)的空间参数,最后自动关联电网资产数据库中的台账记录;第二步,基于三维地图进行复杂航迹规划。借助深度学习算法帮助实现杆塔本体精细化巡检的拍照点自动化精准选定,形成平滑连接各拍照点的飞行航迹,并上传至无人机飞控系统中。第三步,无人机依据规划的飞行航迹,在RTK厘米级精度定位信号下进行复杂业务自主飞行,并借助激光雷达进行自主导航避障。
目前线夹检测主要是采用停电人工登塔检测,利用无人机携带X光检测设备检测还处于研究阶段。目前有两种形式:一种无人机用绳子和X光检测设备连接,在风的影响下,晃动很大,影响挂线,甚至导致坠机。另外一种,无人机和X光检测设备通过连杆螺栓刚性连接。无论哪种连接,都存在一个问题:无人机定位不准确,不能准确落到线夹上。即使依靠无人机携带的视频定位,也是不准确的。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种无人机载自动定位线夹X光检测系统,以解决上述背景技术中提出的问题。
(二)技术方案
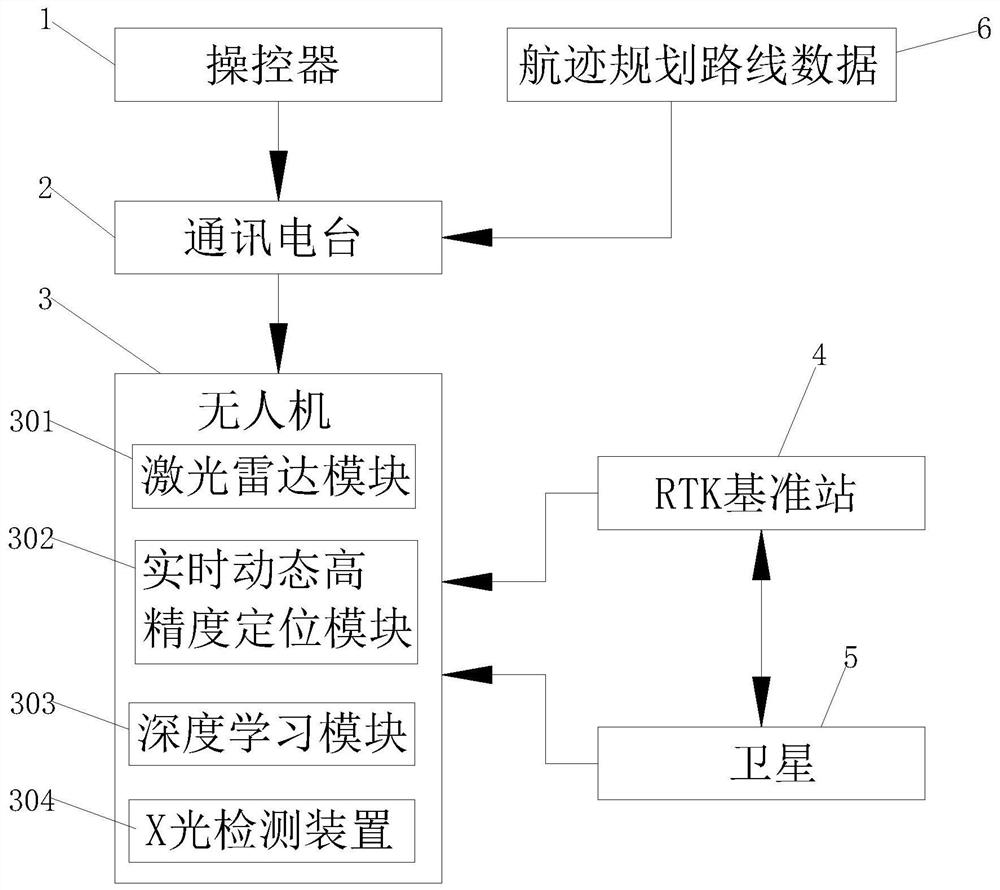
为实现上述目的,本发明提供如下技术方案:一种无人机载自动定位线夹X光检测系统,包括操控器、通讯电台和无人机,所述操控器的输出端与通讯电台的输入端信号连接,所述通讯电台的输入端与航迹规划路线数据的输出端信号连接,所述通讯电台的输出端与无人机的输入端信号连接,所述无人机的输入端与RTK基准站的输出端信号连接,所述RTK基准站与卫星双向信号连接,所述卫星的输出端与无人机的输入端信号连接,所述无人机的内部包括激光雷达模块、实时动态高精度定位模块、深度学习模块和X光检测装置。
优选的,所述无人机的底部固定连接有起落架,通过安装起落架,不需要起降平台,就可以在任意平地或者草地起降,方便了使用,所述X光检测装置固定连接在无人机底部的中部。
优选的,所述RTK基准站每隔2公里架设一座。
优选的,所述X光检测装置包括射线机、成像板、中央处理器、信号发送器和控制中心,所述射线机安装在成像板的下方,所述成像板的输出端与中央处理器的输入端信号连接,所述中央处理器的输出端与信号发送器的输入端信号连接,所述信号发送器的输出端与控制中心的输入端信号连接,射线机产生射线,射线透过线夹后照射到成像板上,成像板将射线能量转换成数字信号传给中央处理器,然后中央处理器判断线夹的好坏,再将数据通过信号发送器传给控制中心,方便人们观看数据。
优选的,所述航迹规划路线数据是根据飞手操作操控器让无人机飞行生成的航线,当设定好航行路线后,将数据存储在航迹规划路线数据中,下次直接根据这个数据自动进行巡检,不需要人控制。
优选的,所述激光雷达模块、实时动态高精度定位模块和深度学习模块均固定在无人机内部电路板上,通过设置激光雷达模块和实时动态高精度定位模块可以使无人机在自动航行的时候能够保证足够的精确度,确保巡检任务顺利。
与现有技术相比,本发明提供了一种无人机载自动定位线夹X光检测系统,具备以下有益效果:
1、本发明通过飞手控制操控器,然后操控器将信号与通讯电台连接,通讯电台根据操控器的信号控制无人机飞行,使无人机将完整的巡检航行飞行一遍,然后生成航迹规划路线数据,从而使以后的巡检不需要人为控制,无人机通过航迹规划路线数据进行自动飞行,从而达到自动巡检的效果,并且在无人机内电路板上安装激光雷达模块和实时动态高精度定位模块使无人机在自动航行的时候能够保证足够的精确度,确保巡检任务顺利,从而方便人们使用。
2、本发明通过在无人机的底部安装起落架,不需要起降平台,就可以在任意平地或者草地起降,简化了起飞的过程,方便使用,通过设置卫星对无人机进行航线的规划和自动控制,可以保证无人机的正常飞行,避免了人为操作失误可能导致的摔机或者事故的发生,通过设置X光检测装置,射线机产生射线,射线透过线夹后照射到成像板上,成像板将射线能量转换成数字信号传给中央处理器,然后中央处理器判断线夹的好坏,再将数据通过信号发送器传给控制中心,方便人们观看数据。
附图说明
图1为本发明系统框图;
图2为本发明X光检测装置的系统图;
图3为本发明无人机和X光检测装置的结构图。
图中:1操控器、2通讯电台、3无人机、301激光雷达模块、302实时动态高精度定位模块、303深度学习模块、304X光检测装置、3041射线机、3042成像板、3043中央处理器、3044信号发送器、3045控制中心、4RTK基准站、5卫星、6航迹规划路线数据、7起落架。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
请参阅图1-3,本发明提供一种技术方案:一种无人机载自动定位线夹X光检测系统,包括操控器1、通讯电台2和无人机3,操控器1的输出端与通讯电台2的输入端信号连接,通讯电台2的输入端与航迹规划路线数据6的输出端信号连接,航迹规划路线数据6是根据飞手操作操控器1让无人机3飞行生成的航线,当设定好航行路线后,将数据存储在航迹规划路线数据6中,下次直接根据这个数据自动进行巡检,不需要人控制,通讯电台2的输出端与无人机3的输入端信号连接,无人机3的输入端与RTK基准站4的输出端信号连接,RTK基准站4每隔2公里架设一座,RTK基准站4与卫星5双向信号连接,卫星5的输出端与无人机3的输入端信号连接,无人机3的内部包括激光雷达模块301、实时动态高精度定位模块302、深度学习模块303和X光检测装置304,激光雷达模块301、实时动态高精度定位模块302和深度学习模块303均固定在无人机3内部电路板上,通过设置激光雷达模块301和实时动态高精度定位模块302可以使无人机3在自动航行的时候能够保证足够的精确度,确保巡检任务顺利,无人机3的底部固定连接有起落架7,通过安装起落架7,不需要起降平台,就可以在任意平地或者草地起降,方便了使用,X光检测装置304固定连接在无人机3底部的中部,X光检测装置304包括射线机3041、成像板3042、中央处理器3043、信号发送器3044和控制中心3045,射线机3041安装在成像板3042的下方,成像板3042的输出端与中央处理器3043的输入端信号连接,中央处理器3043的输出端与信号发送器3044的输入端信号连接,信号发送器3044的输出端与控制中心3045的输入端信号连接,射线机3041产生射线,射线透过线夹后照射到成像板3042上,成像板3042将射线能量转换成数字信号传给中央处理器3044,然后中央处理器3044判断线夹的好坏,再将数据通过信号发送器3044传给控制中心3045,方便人们观看数据。
在使用时,飞手控制操控器1,然后操控器1将信号与通讯电台2连接,通讯电台2根据操控器1的信号控制无人机3飞行,使无人机3将完整的巡检航行飞行一遍,然后生成航迹规划路线数据6,从而使以后的巡检不需要人为控制,无人机3通过航迹规划路线数据6进行自动飞行,从而达到自动巡检的效果,并且在无人机3内电路板上安装激光雷达模块301和实时动态高精度定位模块302使无人机3在自动航行的时候能够保证足够的精确度,确保巡检任务顺利,从而方便人们使用,通过在无人机3的底部安装起落架7,不需要起降平台,就可以在任意平地或者草地起降,简化了起飞的过程,方便使用,通过设置卫星5对无人机3进行航线的规划和自动控制,可以保证无人机3的正常飞行,避免了人为操作失误可能导致的摔机或者事故的发生,通过设置X光检测装置,射线机3041产生射线,射线透过线夹后照射到成像板3042上,成像板3042将射线能量转换成数字信号传给中央处理器3044,然后中央处理器3044判断线夹的好坏,再将数据通过信号发送器3044传给控制中心3045,方便人们观看数据。
综上可得,本发明通过飞手控制操控器1,然后操控器1将信号与通讯电台2连接,通讯电台2根据操控器1的信号控制无人机3飞行,使无人机3将完整的巡检航行飞行一遍,然后生成航迹规划路线数据6,从而使以后的巡检不需要人为控制,无人机3通过航迹规划路线数据6进行自动飞行,从而达到自动巡检的效果,并且在无人机3内电路板上安装激光雷达模块301和实时动态高精度定位模块302使无人机3在自动航行的时候能够保证足够的精确度,确保巡检任务顺利,从而方便人们使用,通过在无人机3的底部安装起落架7,不需要起降平台,就可以在任意平地或者草地起降,简化了起飞的过程,方便使用,通过设置卫星5对无人机3进行航线的规划和自动控制,可以保证无人机3的正常飞行,避免了人为操作失误可能导致的摔机或者事故的发生,通过设置X光检测装置,射线机3041产生射线,射线透过线夹后照射到成像板3042上,成像板3042将射线能量转换成数字信号传给中央处理器3044,然后中央处理器3044判断线夹的好坏,再将数据通过信号发送器3044传给控制中心3045,方便人们观看数据。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种无人机载自动定位线夹X光检测系统
- 一种无人机载自动定位线夹X光检测系统