一种光伏电站的巡检系统和无人机系统集成方法
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及光伏巡检,尤其涉及光伏电站的巡检系统与无人机系统集成方法。
背景技术
在光伏电站生产运营过程中,为了提升发电效率,需要对光伏板进行日常巡检,检查光伏板是否处于正常工作状态,包括光伏板是否有脱落、是否有异常遮挡、是否有破裂,光伏支架是否有变形、倾倒、对光方向是否正常等。一般光伏电站占地面积都比较广阔,少则几百亩,多则几千上万亩。在如此广阔范围内以人工方式进行巡检检查工作量大、难度高。无人机系统自动完成光伏电站巡检工作的应用模式逐步建立。光伏电站巡检管理系统和无人机系统产品类型繁多,不同生产厂家技术路线各异,不同类型和厂家产品之间的集成都需要单独进行定制开发;在巡检系统规划巡检任务和制定巡检方案后,还需要到无人机系统去具体制定具体的操作方案,编辑程序;经验不足造成实施不了的,还需要重新制定巡检方案甚至重新规划巡检任务,工作量大、重复率高。
发明内容
本发明的目的在于针对上述背景技术中的不足,提供了一种光伏巡检系统与无人机系统集成方法,解决了现有技术中无人机和巡检系统集成需要单独进行定制开发,工作量大、重复率高的问题。
为实现上述目的,本发明采用了如下的技术方案:
一种光伏电站的巡检系统和无人机系统集成方法,其特征在于,包括如下步骤:
为巡检系统分配无人机系统访问令牌,将无人机系统的基础信息和巡检系统进行同步和交换;根据巡检需求确定巡检流程;同步定义无人机系统和巡检系统在巡检流程中操作指令的规范和参数设置;从巡检系统发起请求,无人机系统提供响应。
与现有技术相比,本发明的有益效果是:
为巡检系统预先分配无人机系统访问令牌,使得巡检系统可以读写无人机系统基本信息,完成巡检系统和无人机系统的信息同步和交换,作为集成基础;从巡检需求出发,进行巡检流程,将巡检流程中所涉及的操作指令进行同步定义,这样从巡检系统发起的请求,无人机系统基于自身的功能直接可以识别执行,无需在巡检系统制定巡检方案后再到无人机系统进行重复编辑和转换;由于无人机系统本身应当是满足巡检基本需求,肯定能够完成巡检流程中各个功能,因此均可采用此方法进行集成,无需针对性的设计,大大降低了工作量;同步定义是针对巡检流程做出的,也排除了许多无关的操作指令的规范和操作。
附图说明
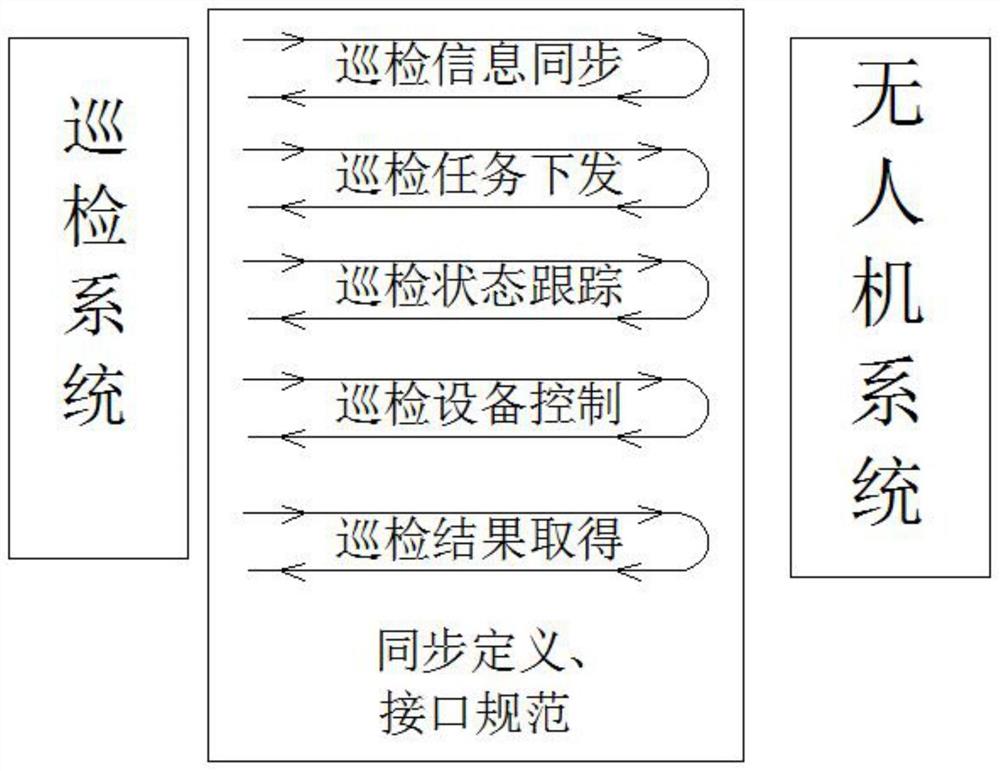
图1本发明的流程图。
具体实施方式
下面通过实施例结合附图对本发明中的技术方案进一步说明。
本发明提供了一种光伏电站的巡检系统和无人机系统集成方法,包括以下步骤如下步骤:
为巡检系统分配无人机系统访问令牌,将无人机系统的基础信息和巡检系统进行同步和交换;根据巡检需求确定巡检流程;同步定义无人机系统和巡检系统在巡检流程中操作指令的规范和参数设置;从巡检系统发起请求,无人机系统提供响应。
同步的基础信息包括机库、无人机、航线、航点等内容。作为后续集成巡检系统和无人机系统和具体执行操作指令的基础。
机库的基本信息包括机库编码、机库名称、机库品牌、备案编号、机库内电池数量、机库所在位置经度和机库所在位置纬度;上述信息如无人机系统参数中本身具有则同步,若无则无需同步;机库不唯一时,其中至少应当包括机库编码和位置信息,方便规划巡检任务和设计巡检方案;机库编码自行设定,位置信息根据实际情况输入。
无人机的基本信息包括无人机编码、无人机名称、无人机品牌、无人机型号和备案编号等;无人机的位置和状态信息是变化的,无人机系统和巡检系统通过长连接实时同步,无人机位置根据无人机系统反馈情况确定。
无人机基础信息到巡检基础信息的同步,使得在进行巡检任务规划和巡检方案制定时就能够对无人机系统的巡检能力做充分考虑;能够制定出更为合理的、能够执行的方案,增加了无人机系统的有效利用。
巡检流程根据巡检需求确定,也就确定了无人机系统在执行过程中需要用到的功能,对这些功能的实现所需要的操作指令进行规范和同步定义后,可以通过巡检系统直接对这些操作指令中的参数进行编辑,进而从巡检系统发起请求就能够得到无人机系统的响应,无需再到无人机系统进行巡检方案的重复编辑和转换工作,降低了工作量。这些功能是巡检的基本需求,具备相应的功能的无人机系统才会被采购,因此,所有的无人机系统均具备该流程中的功能,不同厂家和型号的无人机系统适用于这一规范和同步定义,无需针对性的开发,大大减少了工作量和重复工作。
进一步的,所述巡检流程可以包括下发巡检任务;巡检设备控制;设备状态跟踪;回传结果数据至巡检系统。下发巡检任务便于执行,其中涉及到操作指令及其参数,进行同步规范和定义之后,无人机系统直接根据操作指令和参数基于自身功能执行,巡检设备的状态跟踪贯穿整个巡检执行过程中的,无人机系统将实施获取的环境状态和自身状态及时的传送至巡检系统,方便应对突发情况,保证执行过程;巡检设备控制,能够及时响应意料之外的情况。结果回传则方便数据的后续处理,了解光伏电站的整体情况。
在巡检系统与无人机系统完成基础信息同步的基础上,巡检系统通过巡检任务下发接口规范定义规则,将巡检任务下发给无机系统,无人机系统接收任务,完成相关有效性检查和校验,依据无人机当前设备状态和外部环境情况,完成接收到巡检任务的调度执行。主要包括下发巡检任务、暂停巡检任务、恢复巡检任务、取消巡检任务、查询巡检任务、删除巡检任务历史记录。
巡检任务改变时,可能涉及对航线信息的增加、修改和删除;需要对航线信息进行编辑;因此,所述基础信息还包括航线的编辑信息,基础信息同步和交换时将巡检系统对航线信息的增加、修改或删除同步至无人机系统,实现巡检系统对航线信息的增加、修改和删除。对航线信息的编辑需要定义航线信息编辑接口规范;编辑并不是每次巡检都要进行的操作,也可以通过无人机系统编辑后同步到巡检系统便于任务的下发;同时工作人员可能还有对巡检记录进行查询和删除的需求,无人机系统中航线信息若包括上述内容则同步,不包括则忽略,上述信息可以简化,但是保证拍摄的航点的经度、纬度、高度、悬停时间、水平角度、俯仰角度和飞行速度,以及航向路线的航行角度和航行速度,应当具备
航线信息包括航线编号、航线名称、创建时间、航线规划创建的人员、航线是否有效、可用、航线里程、计划拍照数量等;
航线信息包括航点信息和航向信息,航点信息的设置为精确拍摄考虑,航向则更多倾向于航行的路径和方式;航线下所有航点信息对象数组,每个数组元素包含下述属性、航点编码、航点序号、航点经度、航点纬度、航点高度、悬停时间、是否为拍照航点、云台水平角度、云台俯仰角度、变焦参数、飞向下一航点的偏航角度、飞向下一航点的水平速度、飞向下一航点的垂直速度、飞向下一航点过程中拍照重叠率、是否为环绕飞行航点、绕飞半径、绕飞方向,顺时针、逆时针。上述信息中,航点的经度、纬度、高度、悬停时间、水平角度、俯仰角度和飞行速度是每个无人机系统必须具备的基础信息。
进一步的,巡检状态跟踪基于巡检系统和无人机系统状态的长连接建立,巡检任务执行过程中的实时状态,无人机系统都通过长连接向巡检系统同步更新,同时也方便对巡检结果的实时查看。巡检状态跟踪可以支持多种接口协议完成同步,如基于HTTP协议、WebSocket协议和JSON数据格式对巡检状态跟踪接口规范进行描述。
完成将无人机系统完成巡检任务过程中,设备当前实时运行状态,同步推送巡检系统供管理人员监视的功能,该实时状态推送通过建立的状态更新长连接进行推送。根据具体无人机系统可提供的内容具体可以包括环境状态,如:天气情况、温度、湿度、风速、风向、气压和雨量;电源状态:供电类型、市电、电池、UPS、电压、频率、剩余电量百分比、剩余电量时长、是否充电中和充电充满剩余时长;设备状态:舱门状态、推拉杆状态、升降机状态和机械臂状态;无人机状态:无人机编码、无人机状态、飞行模式(手动、自动)、飞行时长、飞行里程、水平速度、垂直速度和已拍摄照片数;无人机位置信息:gps状态、航点经度、航点纬度、航点高度、距机库距离和距机库高度;电池状态:电压、剩余电量百分比、剩余电量时长和建议返航剩余电量百分比;设备对象状态:无人机偏航角度、翻滚角度、云台水平角度、云台俯仰角度和变焦参数。上述参数中,巡检系统均可配置,无人机系统视自身系统是否具备相应参数设置而选择是否同步。
完成将无人机系统完成巡检任务过程中,巡检系统开启无人机系统指定摄像头,取得和显示指定摄像头实时视频的功能。一个无人机可能对应多个摄像头,在选择无人机时,可以先选定摄像头编码,再获取对应的无人机编码,在获取摄像头信息时,则直接选择相应的摄像头编码找到对应摄像头获取相应信息。
巡检设备控制是指在光伏电站管理人员日常工作中,通过在巡检系统相关界面,完成对无人机系统的机库、无人机等设备的基本控制,避免电站管理人员必须到无人机、机库等设备上进行操作。主要进行机库和无人机进入急停和从急停恢复的控制。巡检设备控制可以支持多种接口协议完成。主要功能包括:巡检系统向无人机系统下发控制指令,控制无人机系统设备(机库、无人机)进入急停状态,无人机系统接收到指令时,按无人机系统设备上提供急停按钮相同的功能和逻辑进行处理,完成相关设备的急停处理。或者控制无人机系统设备(机库、无人机)从急停状态恢复到正常工作状态,无人机系统接收到指令时,按无人机系统设备上提供急停恢复相同的功能和逻辑进行处理,完成相关设备的急停恢复处理。
巡检结果获取是巡检系统与无人机系统集成完成自动巡检任务的输出,是巡检系统进行后续异常和故障识别分析的数据来源。在无人机系统完成巡检系统下发的巡检任务过程中,按巡检任务要求,在无人机巡飞过程中完成照片拍摄、视频记录,无人机巡飞返回后,无人机系统应将巡飞过程拍摄的照片和视频作为巡检任务结果数据,回传给巡检系统完成后续工作。巡检结果获取可以支持多种接口协议完成,例如基于HTTP协议、JSON数据格式和二进制数据格式对巡检结果获取接口规范进行描述。
如上述方案所述,本发明从光伏电站自动化巡检需求出发,重新定义巡检过程步骤;且基于该步骤逻辑对巡检系统与无人机系统所需接口和规范进行了设计和定义;与无人机产品类型无关,针对必要的通用功能与巡检系统进行集成,除去了从制定巡检计划到巡检执行之间的获取、翻译等中间步骤,降低了工作量、减少了重复工作;同时做到基础信息的同步与交换,为制定巡检计划提供可靠依据。
在已知功能的情况下,对所需接口和规范进行了设计和定义本身是本领域技术人员能够做到,具体过程不做一一阐述,下面以航线信息同步和交换以及航线编辑为例进行展示:
航线信息接口规范
请求参数:
响应结果:
航线信息编辑接口规范:
请求参数
结果响应:
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种光伏电站的巡检系统和无人机系统集成方法
- 一种用于渔光互补式光伏电站的无人机巡检系统及巡检方法