车辆的气压制动装置
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及一种车辆,特别涉及一种车辆的气压制动装置。
背景技术
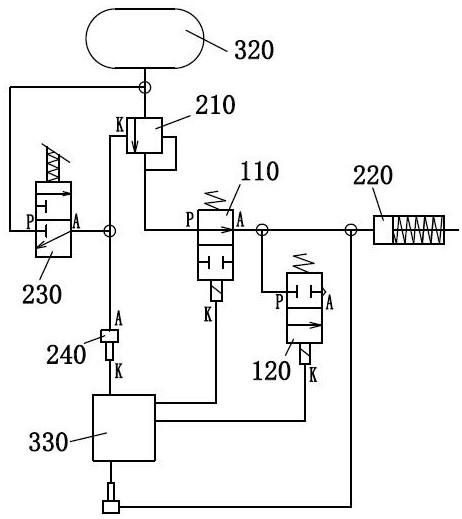
如图4所示,中国专利文献CN110816501A(申请号201911146560.7)公开的防抱死电磁阀及制动装置、气压制动系统,包括第一电磁阀110 、第二电磁阀120、第三电磁阀130、继动阀210 、制动分泵220、制动总泵230、压力传感器240、储气筒320和防抱死系统控制器330。制动总泵230的进气口P和继动阀210的进气口均与储气筒320连通;第一电磁阀110的进气口P与继动阀210的出气口连通,第一电磁阀110的出气口A分别与第二电磁阀120的进气口P、第三电磁阀130的进气口P和制动分泵220连通,第二电磁阀120的出气口A和第三电磁阀130的出气口A均与大气相通;制动总泵230的出气口A分别与继动阀210的控制口K和压力传感器240的控制口A连通。第一电磁阀110 的接线端K、第二电磁阀120的接线端K、第三电磁阀130的接线端K和压力传感器240的接线端K均防抱死系统控制器330电连接或无线通讯连接。当进行防抱死动作时,由防抱死系统控制器330控制第一电磁阀110的进气口P和出气口A不相通和第二电磁阀120的进气口P和出气口A相通;当压力传感器240检测到的压力为零时,由防抱死系统控制器330控制第三电磁阀130的进气口P和出气口A相通。
当进行防抱死动作这时制动总泵230的进气口P与执行口A相通时,由防抱死系统控制器330控制第一电磁阀110的进气口P和出气口A不相通,且二电磁阀120的进气口P和出气口A相通,制动分泵220中压力气体可以经第二电磁阀120的出气口A排到大气中,这样就可以实现防抱死泄压,从而实现防抱死控制。当不需要进行防抱死动作时,由防抱死系统控制器330控制第一电磁阀110的进气口P和出气口A相通,且二电磁阀120的进气口P和出气口A不相通。当进行正常解除制动时,由于这时制动总泵230关闭即制动总泵230的进气口P与执行口A不相通,因而制动总泵230与继动阀210之间的管路内的压力为零,压力传感器240检测到的压力为零,这时继动阀210的进口和出口不相通,此时防抱死系统控制器330根据压力传感器240的压力信号控制第三电磁阀130的进气口P和出气口A相通,制动分泵220中的压力气体能够经第三电磁阀130的出气口A排到大气中,从而实现不进行制动行时,制动分泵220中的压力气体可以快速泄压,从而提高解除制动的效率,降低制动解除过程的延迟。当制动分泵220快速泄压完成后,由防抱死系统控制器330控制第三电磁阀130的进气口P和出气口A不相通。当驾驶员正常进行制动时,这时第一电磁阀110的进气口P和出气口A相通,且第二电磁阀120的进气口P和出气口A不相通,第三电磁阀130的进气口P和出气口A不相通,储气筒320中的压力气体可以经制动总泵230到达继动阀210的控制口K,进而使继动阀210的进口和出口连通,这时储气筒320中的压力气体可以经继动阀210再经第一电磁阀110到达制动分泵220,通过制动分泵将压力转换为机械运动带动与其连接的制动器实现制动。
上述的防抱死电磁阀及制动装置、气压制动系统虽然可以实现防抱死控制和降低制动解除过程的延迟,但由于需要采用第一电磁阀110 、第二电磁阀120和第三电磁阀130三个电磁阀,且三个电磁阀均需要与防抱死系统控制器330连接,因而结构较复杂且制造成本高。
发明内容
本发明的目的在于提出一种结构较简单、制造成本低,且可以实现防抱死控制和降低制动解除过程的延迟的车辆的气压制动装置。
为达到上述目的,本发明采取如下技术方案:一种车辆的气压制动装置,包括第一电磁阀、第二电磁阀、继动阀 、制动分泵、制动总泵、压力传感器、储气筒和防抱死系统控制器;所述制动总泵的进气口P和继动阀的进气口均与储气筒连通;所述第一电磁阀的进气口P与继动阀的出气口连通;所述第二电磁阀的出气口A与大气相通;所述制动总泵的出气口A分别与继动阀的控制口K和压力传感器的控制口A连通;当进行防抱死动作时,由防抱死系统控制器控制第一电磁阀的进气口P和出气口A不相通和第二电磁阀的进气口P和出气口A相通。
所述第一电磁阀的出气口A分别与第二电磁阀的进气口P和制动分泵连通。所述第一电磁阀 的接线端K、第二电磁阀的接线端K和压力传感器的接线端K均防抱死系统控制器电连接或无线通讯连接;当压力传感器检测到的压力为零时,由防抱死系统控制器控制第二电磁阀的进气口P和出气口A相通。
还包括第一气控换向阀、双压阀和第二气控换向阀;所述第一气控换向阀的进气口P与储气筒连通,第一气控换向阀的执行口A与双压阀的第二进气口P2连通,第一气控换向阀的控制口K与制动分泵连通;所述双压阀的第一进气口P1与制动总泵的出气口A连通,双压阀的执行口A分别与第二气控换向阀的第二进气口P2和第二气控换向阀的控制口K连通;所述第二气控换向阀设置在第一电磁阀的出气口A至制动分泵的气通道上,且第二气控换向阀的第一进气口P1与第一电磁阀的出气口A连通,第二气控换向阀的执行口A与制动分泵连通;当第二气控换向阀的控制口K通入压力气体时,第二气控换向阀的第二进气口P2与执行口A相通。
本发明具有如下积极效果:(1)由于本发明的压力传感器检测到的压力为零时,由防抱死系统控制器控制第二电磁阀的进气口P和出气口A相通,因而当进行正常解除制动时,由于这时制动总泵关闭(即制动总泵的进气口P与执行口A不相通),因而制动总泵与继动阀之间的管路内的压力为零,压力传感器检测到的压力为零,这时继动阀的进口和出口不相通,防抱死系统控制器根据压力传感器的压力信号控制第二电磁阀的进气口P和出气口A相通,制动分泵中的压力气体能够经第二电磁阀的出气口A排到大气中,从而实现不进行制动行时,制动分泵中的压力气体可以快速泄压,从而提高解除制动的效率,降低制动解除过程的延迟。由于本发明只需要采用第一电磁阀 和第二电磁阀就可以实现防抱死控制和降低制动解除过程的延迟,因而结构简单,制造成本低。
附图说明
图1是本发明的原理图;
图2是本发明还包括第一气控换向阀、双压阀和第二气控换向阀时的原理图;
图3为本发明的第一电磁阀、第二电磁阀、压力传感器、防抱死系统控制器的电路结构示意框图。
图4是现有技术的车辆的气压制动装置。
上述附图中的附图标记如下:第一气控换向阀1、双压阀2、第二气控换向阀3、第一电磁阀110 、第二电磁阀120、第三电磁阀130、继动阀210 、制动分泵220、制动总泵230、压力传感器240、储气筒320、防抱死系统控制器330。
具体实施方式
以下结合附图以及给出的实施例,对本发明作进一步的说明。
如图1所示,一种车辆的气压制动装置,包括第一电磁阀110 、第二电磁阀120、继动阀210 、制动分泵220、制动总泵230、压力传感器240、储气筒320和防抱死系统控制器330;所述制动总泵230的进气口P和继动阀210的进气口均与储气筒320连通;所述第一电磁阀110的进气口P与继动阀210的出气口连通;所述第二电磁阀120的出气口A与大气相通;所述制动总泵230的出气口A分别与继动阀210的控制口K和压力传感器240的控制口A连通;当进行防抱死动作时,由防抱死系统控制器330控制第一电磁阀110的进气口P和出气口A不相通和第二电磁阀120的进气口P和出气口A相通。
所述第一电磁阀110的出气口A分别与第二电磁阀120的进气口P和制动分泵220连通。所述第一电磁阀110 的接线端K、第二电磁阀120的接线端K和压力传感器240的接线端K均防抱死系统控制器330电连接或无线通讯连接;当压力传感器240检测到的压力为零时,由防抱死系统控制器330控制第二电磁阀120的进气口P和出气口A相通。当制动分泵220快速泄压完成后,由防抱死系统控制器330控制第二电磁阀120的进气口P和出气口A不相通。本实施例中,通过在通向制动分泵220的管路上连接一个压力传感器并将压力传感器与防抱死系统控制器330电连接或无线通讯连接,压力传感器采用型号为JY-P400的压力传感器。当连接在制动分泵220的管路上的压力传感器检测到的压力为零时,制动分泵220快速泄压就已完成,由防抱死系统控制器330控制第二电磁阀120的进气口P和出气口A不相通。
如图3所示,本实施例中,防抱死系统控制器330包括将压力传感器240检测到的压力信号转换为单片机模块能够处理的信号的信号转换模块,用于根据检测信号发出控制指令的单片机模块,用于根据单片机模块的指令相应控制电磁阀电源通断的继电器和用于提供电源的电源模块。其中压力传感器240采用型号为JY-P400的压力传感器。
正常情况下,第一电磁阀110的进气口P和出气口A相通,第二电磁阀120的进气口P和出气口A不相通。
本发明的工作原理如下:由于本发明的车辆的气压制动装置在压力传感器240检测到的压力为零时,由防抱死系统控制器330控制第二电磁阀120的进气口P和出气口A相通,因而当进行正常解除制动时,由于这时制动总泵230关闭(即制动总泵230的进气口P与执行口A不相通),因而制动总泵230与继动阀210之间的管路内的压力为零,压力传感器240检测到的压力为零,这时继动阀210的进口和出口不相通,防抱死系统控制器330根据压力传感器240的压力信号控制第二电磁阀120的进气口P和出气口A相通,制动分泵220中的压力气体能够经第二电磁阀120的出气口A排到大气中,从而实现不进行制动行时,制动分泵220中的压力气体可以快速泄压,从而提高解除制动的效率,降低制动解除过程的延迟。由于本发明只需要采用第一电磁阀110 和第二电磁阀120就可以实现防抱死控制和降低制动解除过程的延迟,因而结构简单,制造成本低。
如图2所示,还包括第一气控换向阀1、双压阀2和第二气控换向阀3;所述第一气控换向阀1的进气口P与储气筒320连通,第一气控换向阀1的执行口A与双压阀2的第二进气口P2连通,第一气控换向阀1的控制口K与制动分泵220连通;当第一气控换向阀1的控制口K没有通入压力气体时,第一气控换向阀1的进气口P与执行口A相通;当第一气控换向阀1的控制口K通入压力气体时,第一气控换向阀1的进气口P与执行口A不相通。所述双压阀2的第一进气口P1与制动总泵230的出气口A连通,双压阀2的执行口A分别与第二气控换向阀3的第二进气口P2和第二气控换向阀3的控制口K连通;所述第二气控换向阀3设置在第一电磁阀110的出气口A至制动分泵220的气通道上,且第二气控换向阀3的第一进气口P1与第一电磁阀110的出气口A连通,第二气控换向阀3的执行口A与制动分泵220连通;当第二气控换向阀3的控制口K通入压力气体时,第二气控换向阀3的第二进气口P2与执行口A相通。当第二气控换向阀3的控制口K没有通入压力气体时,第二气控换向阀3的第一进气口P1与执行口A相通。
当本发明还包括第一气控换向阀1、双压阀2和第二气控换向阀3时,可以实现压力传感器240损坏时,不会影响正常制动,这样会使制动安全性更高,理由如下:
当压力传感器240没有损坏时,解除制动时,压力传感器240的控制口A没有通入压力气体,压力传感器240检测到的压力才会为零,才会由防抱死系统控制器330控制第二电磁阀120的进气口P和出气口A相通。当压力传感器240损坏时,进行制动时,压力传感器240的控制口A通入压力气体,但压力传感器240检测到的压力也为零,由防抱死系统控制器330控制第二电磁阀120的进气口P和出气口A相通,这时驾驶员进行制动时,储气筒320中的压力气体可以经制动总泵230到达继动阀210的控制口K,进而使继动阀210的进口和出口连通,这时储气筒320中的压力气体可以经继动阀210到达第一电磁阀110的进气口P,但由于此时第二电磁阀120的进气口P和出气口A相通,因而压力气体经第一电磁阀110后会经第二电磁阀120排到大气中,压力气体就不能达制动分泵220,就不能带动制动器进行制动,即压力传感器240损坏时会出现驾驶员进行制动时制动器不具有制动的情况,这样就非常危险。
当本发明还包括第一气控换向阀1、双压阀2和第二气控换向阀3时,当压力传感器240损坏,且进行制动时,压力传感器240的控制口A通入压力气体,但压力传感器240检测到的压力为零,由防抱死系统控制器330控制第二电磁阀120的进气口P和出气口A相通,这时驾驶员进行制动时,储气筒320中的压力气体可以经制动总泵230到达继动阀210的控制口K和双压阀2的第一进气口P1,还由于压力传感器240检测到的压力为零,这时防抱死系统控制器330控制第二电磁阀120的进气口P和出气口A相通,制动分泵220也没有压力气体,这时第一气控换向阀1的控制口K没有通入压力气体,第一气控换向阀1的进气口P与执行口A相通,储气筒320中的压力气体经第一气控换向阀1到达双压阀2的第二进气口P2,这时的双压阀2的执行口A具有压力气体,压力气体经双压阀2的执行口A到达第二气控换向阀3的控制口K,这时第二气控换向阀3的第二进气口P2与执行口A相通,双压阀2的执行口A的压力气体经第二气控换向阀3的第二进气口P2到达制动分泵220,就能带动制动器进行制动,即压力传感器240损坏时不会影响正常制动,使制动安全性更高。
正常情况下,驾驶员进行制动时,双压阀2的第一进气口P1具有压力气体,制动分泵220也具有压力气体,第一气控换向阀1的控制口K通入压力气体,第一气控换向阀1的进气口P与执行口A不相通,储气筒320中的压力气体不能经第一气控换向阀1到达双压阀2的第二进气口P2,这时的双压阀2的执行口A不具有压力气体,也没有压力气体到达第二气控换向阀3的控制口K,这时第二气控换向阀3的第一进气口P1与执行口A相通。驾驶员没有进行制动时,双压阀2的第一进气口P1不具有压力气体,这时双压阀2的执行口A不具有压力气体,也没有压力气体到达第二气控换向阀3的控制口K,这时第二气控换向阀3的第一进气口P1与执行口A相通。
- 车辆坡道起步控制装置及使用该装置的车辆气压制动系统
- 双塔干燥器控制器、车辆气压制动系统及车辆