带螺口容器的开合盖装置
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及农药残留检测设备技术领域,尤其涉及一种带螺口容器的开合盖装置。
背景技术
在农药残留检测过程中,要对检测样品进行注液灌装,一般是人工操作,先将干净的检测瓶置于注液位置,拧开瓶盖后,通过注液设备注液后,再拧上瓶盖。由于检测过程中要处理大量的样品,要对大量的检测瓶进行开盖和拧盖的动作。
具体的操作是,先将检测瓶架放置在操作人员工作台,然后工作人员对每个检测瓶进行开盖动作,并逐一扫描二维码,然后再进行注液、搅拌等动作后,再一一盖上瓶盖。
由于检测瓶的数量多,很容易出现顺序紊乱的问题,另外瓶盖的错乱,会引起检测液交叉污染的风险。
发明内容
本发明的目的是为了解决上述问题,提供一种带螺口容器的开合盖装置,自动完成对带螺口容器的开盖、合盖的操作,为农残检测提供样品的前处理。
本发明采取的技术方案是:
一种带螺口容器的开合盖装置,其特征是,包括容器台和开合盖机构,所述容器台设置在开合盖机构下方,所述开合盖机构包括支座,支座上通过竖直升降单元和水平移动单元设置旋转夹头,所述容器台上设置带螺口的容器,所述竖直升降单元和水平移动单元将旋转夹头移至容器上方,竖直升降单元驱动旋转夹头下降至容器开合盖位置,旋转夹头夹持容器盖后旋出容器或将夹持的容器盖旋入容器。
进一步,所述竖直升降单元包括竖直导轨座,所述竖直导轨座通过滑轨设置在支座上,所述竖直导轨座上设置竖直驱动部件,所述竖直驱动部件驱动竖直导轨座在支座上竖直升降,所述水平移动单元设置在竖直导轨座上,所述水平移动单元包括水平导轨座,所述水平导轨座通过滑轨设置在竖直导轨座上方,在水平导轨座上设置水平驱动部件,所述水平驱动部件驱动水平导轨座在 竖直导轨座上水平移动,所述旋转夹头设置在水平导轨座的前端。
进一步,所述竖直驱动部件和水平驱动部件均为气缸,分别为竖直气缸和水平气缸,所述竖直气缸的活塞与支座配合驱动竖直导轨座在升降,所述水平气缸的活塞与竖直导轨座配合驱动水平导轨座移动。
进一步,所述旋转夹头包括旋转部件和夹持部件,所述夹持部件设置在旋转部件下方,所述旋转部件通过设置在水平导轨座上的电机驱动。
进一步,所述夹持部件为气爪,所述旋转部件为气动旋转接头,所述气爪连接在气动旋转接头上。
进一步,所述旋转部件与水平导轨座之间设置止动架。
进一步,所述容器台上设置容器夹,所述容器夹为对称设置两个贴合夹片,两个夹片的后端通过转轴旋转设置在容器台上,两个夹片的前端为楔形角,两个夹片的中间形成容器容置孔,所述支座上通过底部气缸设置楔槽块,所述底部气缸将楔槽块伸出后与两个夹片的楔形角配合,将容器夹限位并将容器固定在容器容置孔内,所述容器夹与水平导轨座在同一竖直面上。
进一步,在所述转轴上设置帽架,所述帽架的尺寸小于容器螺口的尺寸,高度不高于容器螺口位置。
进一步,所述容器容置孔的侧壁上设置小孔,孔内突出设置橡胶柱,所述两个夹片靠近前端位置设置限位螺杆,限位螺杆上套设推力弹簧。
进一步,所述容器台为圆形,通过转盘设置在底座上,在容器台上设置多个所述容器夹,所述容器夹在容器台上呈星状排布,多个容器夹位于开合盖装置的多个工位上,所述开合盖机构为两个,布置在容器台外的两侧,所述转盘每转动一个工位的角度,第一个开合机构对容器夹上的容器进行开盖操作,第二个开合机构对容容器夹上的容器进行合盖操作。
本发明的有益效果是:
(1)全自动开盖合盖动作,动作精准高效;
(2)精确定位容器位置,使容器和容器盖一一对应,避免交叉;
(3)旋转工位操作,提高工作效率;
(4)可通过光电感应部件,确保开盖合盖动作的有效性;
(5)为样品农药残留检测自动化过程提供前处理准备。
附图说明
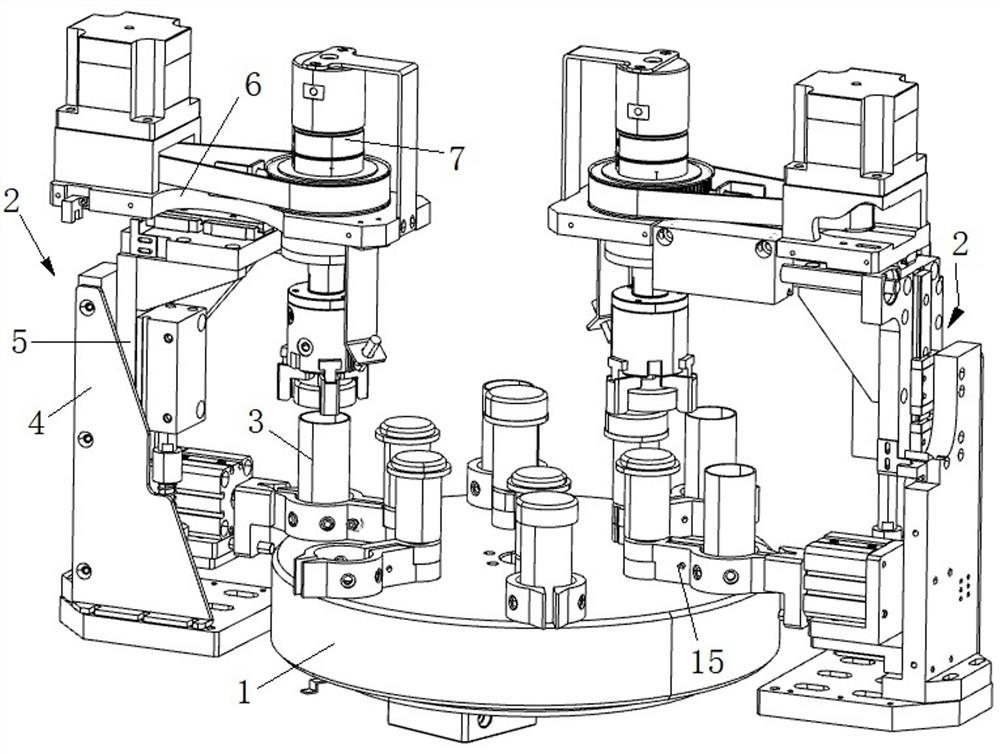
附图1是本发明的总体立体结构示意图;
附图2是开合盖机构的一个视角的结构示意图;
附图3是开合盖机构的另一个视角的结构示意图;
附图4是容器夹与开合盖机构配合时的结构示意图;
附图5是附图4的俯视视图。
附图中的标号分别为:
1. 容器台; 2. 开合盖机构;
3. 容器; 4. 支座;
5. 竖直升降单元; 6. 水平移动单元;
7. 旋转夹头; 8. 竖直导轨座;
9. 水平导轨座; 10. 竖直气缸;
11. 水平气缸; 12. 气爪;
13. 气动旋转接头; 14. 止动架;
15. 容器夹; 16. 夹片;
17. 容器容置孔; 18. 底部气缸;
19. 楔槽块; 20. 橡胶柱;
21. 限位螺杆; 22. 推力弹簧;
23. 帽架; 24. 容器盖;
25. 光电传感器。
具体实施方式
下面结合附图对本发明带螺口容器的开合盖装置的具体实施方式作详细说明。
参见附图1,带螺口容器的开合盖装置包括容器台1和开合盖机构2,容器台1用于布置带螺口的容器3。开合盖机构2用于对容器3进行开盖、合盖的操作。
参见附图2、3,开合盖机构2包括L型支座4,支座4上通过竖直升降单元5和水平移动单元6设置旋转夹头7。竖直升降单元5包括竖直导轨座8,竖直导轨座8通过滑轨设置在支座4上,竖直导轨座8上设置竖直驱动部件,竖直驱动部件驱动竖直导轨座8在支座4上竖直升降。
水平移动单元6设置在竖直导轨座8上,水平移动单元6包括水平导轨座9,水平导轨座9通过滑轨设置在竖直导轨座8上方,在水平导轨座9上设置水平驱动部件,水平驱动部件驱动水平导轨座9在竖直导轨座8上水平移动。
竖直驱动部件和水平驱动部件均为气缸,分别为竖直气缸10和水平气缸11,竖直气缸10的活塞头与支座4配合驱动竖直导轨座8在升降,水平气缸11的活塞与竖直导轨座8配合驱动水平导轨座9移动。竖直气缸10安装在竖直导轨座8上,竖直气缸10的活塞头与支座4底部连接,竖直气缸10工作时,通过活塞头将竖直导轨座8顶起上升下降。水平气缸11安装在水平导轨座9上,活塞头安装在竖直导轨座8上,以同样的方式驱动水平导轨座9相对于竖直导轨座8水平移动。
旋转夹头7设置在水平导轨座9的前端,旋转夹头7包括旋转部件和夹持部件,夹持部件设置在旋转部件下方,旋转部件通过设置在水平导轨座9上的电机驱动,电机通过皮带将转动传送至旋转部件。夹持部件为气爪12,旋转部件为气动旋转接头13,气爪12连接在气动旋转接头13上。气动旋转接头13实现对气爪12通气的同时旋转,旋转时并不影响气爪12的供气。
为了防止气动旋转接头13旋转时给气爪12带来影响,在旋转部件与水平导轨座9之间设置止动架14。
继续参见附图1,容器台1设置在开合盖机构2下方,容器台1上设置带螺口的容器3,竖直升降单元5和水平移动单元6将旋转夹头7移至容器3上方,竖直升降单元5驱动旋转夹头7下降至容器3开合盖位置,旋转夹头7夹持容器盖24后旋出容器3或将夹持的容器盖24旋入容器3。
参见附图4、5,容器台1上设置容器夹15,容器夹15为对称设置两个贴合夹片16,两个夹片16的后端通过转轴17旋转设置在容器台1上,两个夹片16的前端为楔形角,两个夹片16的中间形成容器容置孔17,支座4上通过底部气缸18设置楔槽块19,底部气缸18将楔槽块19伸出后与两个夹片16的楔形角配合,将容器夹15限位并将容器3固定在容器容置孔17内,容器夹15与水平导轨座9在同一竖直面上。
在转轴上设置帽架23,帽架的尺寸小于容器3螺口的尺寸,高度不高于容器3螺口位置,帽架23用于放置容器盖24。在容器容置孔17的侧壁上设置小孔,孔内突出设置橡胶柱20,两个夹片16靠近前端位置设置限位螺杆21,限位螺杆21上套设推力弹簧22,限制容器夹15的开口大小。
继续参见附图1,容器台1为圆形,通过转盘设置在底座上,在容器台1上设置多个容器夹15,容器夹15在容器台1上呈星状排布,多个容器夹15位于开合盖装置的多个工位上,开合盖机构2为两个,布置在容器台1外的两侧,转盘每转动一个工位的角度,第一个开合机构对容器夹15上的容器3进行开盖操作,第二个开合机构对容容器夹15上的容器3进行合盖操作。
应用在农药残留前处理项目上时,首先机械手将装有样品粉末的容器3放入容器台1上的容器夹15内,容器台1转动一个工位至第一个开合盖机构2下方,第一开合盖机构2驱动底部气缸18向容器夹15移动,楔槽块19将容器夹15的两个夹片16配合固定,使容器夹15上的容器3定位,开合盖机构2驱动旋转夹头7从容器3的上方下降,气爪12夹紧容器盖24,旋转夹头7旋转,将容器盖24旋出,然后水平导轨座9向上提升后向前移动,使气爪12位于容器夹15上的帽架上方,下降一段距离后,将容器盖24放置于帽架上,开合盖机构2复位。
然后,容器台1转动一个工位,设备对取下容器盖24的容器3进行注液等操作,根据实际工艺步骤,完成一项或多项操作后,转至第二开合盖机构2,第二开合盖机构2从帽架上取下容器盖24后,送至容器3上进行旋转合盖动作,完成将容器3封口,具体过程与开盖过程类似。完成合盖后的容器3旋转至后续工位,由机械手送至后续工艺操作。
在工作过程中,可以通过多个传感器对工作过程监控,配合控制工作中的各部件正常运行,比如通过增加光电传感器25(参见附图2、3),监控气爪12是否正常抓到容器盖24。
以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 带螺口容器的开合盖装置
- 带螺口容器的开合盖装置