基于机器视觉的奶粉罐的偏转角度的计算方法
文献发布时间:2023-06-19 09:30:39
技术领域
本发明属于角度计量领域,具体的说是基于机器视觉中的相机成像原理和几何关系,计算旋转角度的方法。
背景技术
随着轻工业的不断发展,以及国民对婴幼儿健康的愈加重视,奶粉行业竞争不断加剧,制造商对奶粉制造各方面的水准都提出了更高的要求,以满足消费者对于优质奶粉量的需求。因此,在奶粉制造,特别是在包装产出过程中,能够整齐有序,并快速准确的在传送带上运输都成为奶粉制造商关注的焦点。
当前很多奶粉制造商还是采用手动校正奶粉罐方向,奶粉罐的规格繁多,使用人工进行角度调转非常繁琐,不但效率很低,而且精度很大程度上取决于测量者的手感和经验,这样不专业、不规整的生产线严重的限制了生产进度。
虽然,现有的方法也能完成这个功能,但是存在以下问题:1.现有的许多测量方法无法得到精确的角度误差。2.计算精确角度的现有方法或者需要转动照相机,造成测量时间的延长,或者需要人工干预,造成成本的增加。
发明内容
为了克服上述的技术背景中存在的不足之处,本发明旨在提供一种快速、全自动的计算方式,只使用一个CCD相机,对偏离角度实现高速、准确的角度校正。
本发明为实现上述目的所采用的技术方案是:基于机器视觉的奶粉罐的偏转角度的计算方法,包括以下步骤:
步骤1:建立相机坐标系并标定CCD相机;
步骤2:用CCD相机采集罐体侧面周围图像并保存为模板,计算模板上品牌商标中心位置,以品牌商标中心位置规定奶粉罐切面圆位置,将模板图像垂直等分若干份,计算罐体上每等份上的标识沿着罐体切面圆周方向距离品牌商标中心的值得到弧长,根据弧长与切面圆的半径计算得到奶粉罐侧面模板图像中的标识与品牌商标中心的偏差角度α;此时,该偏差角度α即为条件θ为零时的计算角度;
步骤3:CCD相机实时采集现场传送带上的奶粉罐侧面图像,如果奶粉罐侧面图像包含品牌商标中心,计算品牌商标中心偏移的角度θ作为实际奶粉罐在传送带上需要调整的偏离角度;
步骤4:如果奶粉罐侧面图像不包含品牌商标中心,则计算α±θ作为实际奶粉罐在传送带上需要调整的偏离角度。
所述将模板图像垂直等分若干份,用于保证每等份上都有可以衡量与品牌商标偏移角度的标识模板。
所述品牌商标中心偏移的角度θ的计算,具体为:
俯视图中,L3、L4为相机中心与奶粉罐切面圆的切线,再根据已知的奶粉罐切面圆半径,计算相机光心坐标系下切面圆的方程;
假设,A为品牌商标的中心,B为切面上切面圆圆心垂直于X轴的交点,L1为相机光心O点和A点所确定的射线,L2为相机光心O点和B点所确定的射线;根据L1、L2在相机坐标系下的方程与切面圆的方程,计算A、B在相机坐标系的位置;
连接切面圆圆心C与A、B,得到向量v1、v2,按照公式
所述CCD相机视角正对奶粉罐所在的传送带,且在检测过程中位置固定。
本发明具有以下有益效果及优点:
1.发明结构简单只有一个CCD相机。
2.本发明的测量结果对曝光时间的变化和外界光照鲁棒性较好,测量结果稳定,可靠性好,某些同类方案受曝光时间和外界光干扰影响很大。
3.本发明不需要像某些同类产品一样测量的时候需要人工干预,在保证测量精度高的同时,测量时间短。
4.本发明可以实现高速大量重复在线测量,可以提高生产节拍。
附图说明
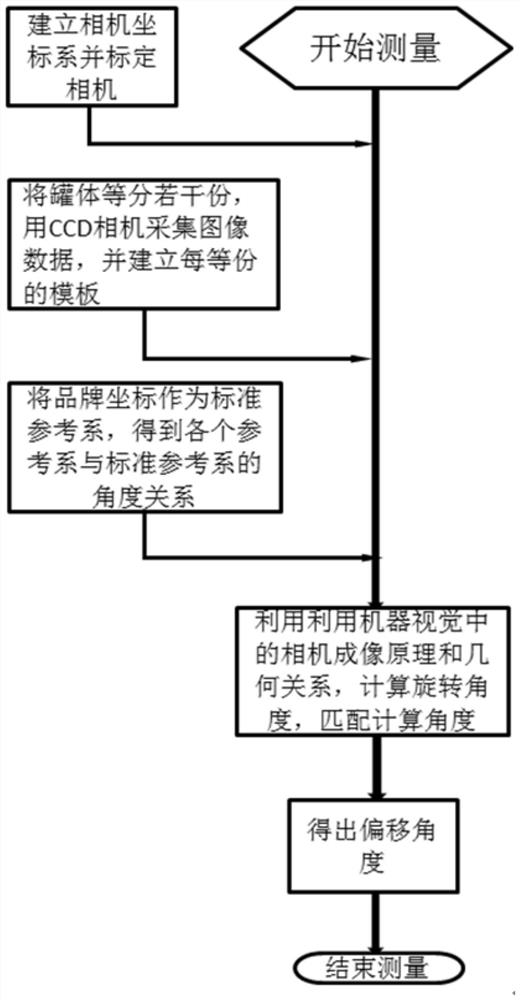
图1为本发明方法流程图;
图2为本发明方法中CCD相机采集奶粉罐图像模板示意图;
图3为本发明方法测量过程中相机正对奶粉罐时拍摄角度的示意图;
图4为本发明方法测量过程中奶粉罐超过相机时拍摄角度的示意图;
图5为本发明方法测量过程中奶粉罐还未到达正对相机位置时拍摄角度的示意图;
图6为本发明方法中几何原理示意图;
图7为本发明方法中运算结果过程的剖面示意图;
图8为本发明方法中运算结果的剖面示意图。
具体实施方式
下面结合附图及实施例对本发明做进一步的详细说明。
本发明方法采用的硬件设备包括:一个CCD相机,一台主控计算机,HALCON机器视觉软件。如图2所示,为本发明方法中CCD相机采集奶粉罐图像数据示意图。标定相机后获得全部基本数据。
如图1所示,基于机器视觉和几何学的奶粉罐偏移角度测量方法,包括以下步骤:
步骤1:建立相机坐标并标定CCD相机;
步骤2:将罐体垂直等分若干份,并用CCD相机采集图像数据,根据罐体上各个标识,围绕罐体建立一周模板(保证每等份上都有可以衡量与品牌商标偏移角度的模板),并计算各个标识模板(例如:“100%”、“儿童配方”等其他图样)与品牌商标中心(即为“飞帆”的中心)之间的角度关系;
步骤3:如果等分模板正对相机的部分包含品牌商标,以相机光心为原点O,相机处于的水平并平行于传送带的直线为X轴,由于奶粉罐半径已知,所以根据相机光心发出的射线与奶粉罐横切面形成的两条切线(可确定)L3、L4来确定奶粉罐切面圆的方程,这样光心与品牌商标中心所确定的射线(可确定)L1,L1与切面圆的交点为A,光心与切面上垂直于X轴点的连线所确定的射线(可确定)L2,L2与切面圆的交点为B两条射线L1、L2与切面圆的交点A、B可由几何知识求得,分别连接圆心C与两个交点形成的线段可视为两个矢量v
步骤4:如果等分模板正对相机的部分不包含品牌商标,这样就要确定模板与品牌商标之间的角度,然后重复步骤3,得到奶粉罐最终的偏移角度。
所述奶粉罐横截面方程的计算如下:
以光心为原点,相机所处的水平面为X轴,根据光心发出的射线与奶粉罐横切面形成两条切线L3、L4以及已知的奶粉罐半径来确定横切面的方程,这样根据解析几何原理可以得到奶粉罐在相机坐标系中的方程。
通过光心并垂直于X轴,且与奶粉罐横切面相交的点形成的射线L1的方程可以确定;
光心O与品牌商标中心之间形成的射线L2的方程也可以确定(L1、L2在同一水平切面);
奶粉罐的切面方程也已知,这样根据几何知识就可以得到射线L1、L2与圆的交点A、B;
分别连接圆心C与L1、L2在切面圆上形成的交点,形成两个矢量v
实例:利用HALCON软件进行计算:
步骤1:利用CCD相机分别采集若干等分模板的图像数据,标定相机并输出给主控计算机,首先在计算机中以0.01mm一个像素的比例将上述图像数据分别保存为模板1到模板n。如图2所示。并使用HALCON中write_image将图像数据保存在计算机硬盘中。
步骤2:使用HALCON中fuzzy measure计算罐体所在的具体位置以及相机的相对位置和奶粉罐在相机坐标系中距离相机光心O的距离(mm)。
步骤3:使用HALCON中get_line_of_sight得到射线L1、L2、L3、L4的方向向量并进行归一化。
步骤4:使用HALCON中的intersection_contours_xld分别计算射线L1、L2与罐体的交点A、B,如图3、4。
步骤5:分别连接圆心C与L1、L2在切面圆上形成的交点,形成两个矢量v
步骤6:v
如图7、8所示,本专利对于奶粉罐偏移角度的测量可精确到小数点后6位,精度远超人工调整角度。
- 基于机器视觉的奶粉罐的偏转角度的计算方法
- 基于电缆压痕高光位置变化的线缆偏转角度计算方法