一种基于自动泊车系统的目标车位选择方法及其系统
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及乘用车智能泊车辅助系统,特别是采用环视摄像头与超声波雷达两类传感器融合的智能泊车辅助系统人机交互界面。
背景技术
早期的智能泊车辅助系统通常使用超声波雷达一种传感器,只能识别由车辆或障碍物围成的边界车位。
为了提升场景覆盖范围及用户体验,新一代的智能泊车辅助系统会同时融合全景影像摄像头与超声波雷达两种传感器,除了靠超声波雷达识别边界车位外,还可以通过全景影像摄像头识别由地面标记(油漆线等)确定的标线车位。
全景影像摄像头识别标线车位的原理为:安装在车辆前后左右的四个鱼眼摄像头摄取车辆四周地面的影像,并拼接形成全景影像。系统再利用视觉识别算法,从全景影像中识别出地面标记,当判断地面标记满足车位条件时,即将其识别为标线车位。标线车位识别原理决定了,只要全景影像范围内有可用备选车位,即可实时识别并同步显示在全景影像界面上。
超声波雷达识别边界车位的原理为:车辆必须完全前行驶过边界车位及组成车位的车辆/障碍物,以使安装在车身侧面的长距超声波雷达探测到车位及车位前后的车辆/障碍物,并在确认车位和车辆/障碍物的尺寸满足条件时,才确认为可用的备选车位。超声波雷达识别边界车位的原理意味着车辆必须前行驶过边界车位一定距离后,系统才能识别出车位。由于全景影像显示的范围是有限的,通常会小于车辆识别边界车位时必须前行的距离,导致边界车位被系统确认识别到时,总是无法显示在全景影像上。
理论上,智能泊车辅助系统应将所有系统识别到并保持记忆的车位显示在人机交互界面上,以供用户自行选择目标车位。但当系统采用全景影像摄像头与超声波雷达融合方案时,现有人机交互界面通常只显示全景影像界面及在全景影像范围内的标线车位,而无法显示超出全景影像范围的标线车位和边界车位。此种人机交互界面大大减少了备选车位范围,不利于发挥智能泊车辅助系统融合方案场景覆盖广的优势,降低了用户体验。
发明内容
本发明的目的是针对现有融合泊车方案人机交互界面上只能实时显示全景影像范围内的备选标线车位,而不能显示全景影像范围外的备选标线车位及备选边界车位问题,提出了一种全新的人机交互界面设计方法,可同时显示出所有系统识别到并保持记忆的备选车位,扩大车位选择范围,提升用户体验。
为了实现上述目的,本发明采用的技术方案为:一种基于自动泊车系统的目标车位选择方法,泊车系统运行时,环境感知单元获取车辆周围信息,并形成全景影像界面,定位系统获取车辆位置信息,形成车辆所在位置设定区域内的电子地图界面,将全景影像界面和电子地图界面重合显示在车载屏幕上作为自动泊车影像。
所述自动泊车影像的重合方式为,显示全部的全景影像界面,自动泊车影像中全景影像界面无法显示的区域显示电子地图界面。
当备选车位未超出全景影像范围时,在全景影像界面将显示备选车位实景及车位标记,当备选车位超出全景影像范围时,系统根据所记忆的车位坐标,在电子地图界面显示备选车位标记。
环境感知单元获取车辆周围信息包括超声波雷达识别出的边界信息和全景摄像头识别出的影像信息,所述边界信息识别出的边界车位和影像信息识别出的标线车位以不同的标记方式显示在自动泊车影像上。
泊车系统开始运行时仅显示全景影像界面,当车辆运行泊车系统时行驶过程中发现边界车位,将全景影像界面向发现有边界车位方向延伸构成自动泊车影像,并标记出所有发现的边界车位。
当用户选择标线的备选车位时,系统将已所选择的备选车位作为目标车位,并执行自动泊车程序。
当选择目标车位后,人机交互界面上应显示一条虚拟的泊车轨迹线,标识出车辆将要泊入的路线。
一种自动泊车系统,车辆设有环境感知单元和定位单元,所述环境感知单元包括采集车辆四周障碍物信息的雷达单元、以及采集车辆四周围影像信息的摄像头单元,所述定位单元和环境感知单元输出信号至自动泊车系统处理器,所述处理器与车载屏幕通信,自动泊车系统执行所述目标车位选择方法。
本发明在现有全景影像界面基础上,额外增加电子地图界面,用于显示超出全景影像范围外的其它备选车位,扩大了车位选择范围,提升了用户体验。
附图说明
下面对本发明说明书中每幅附图表达的内容作简要说明:
图1(a)为边界车位示意图;
图1(b)为标线车位示意图;
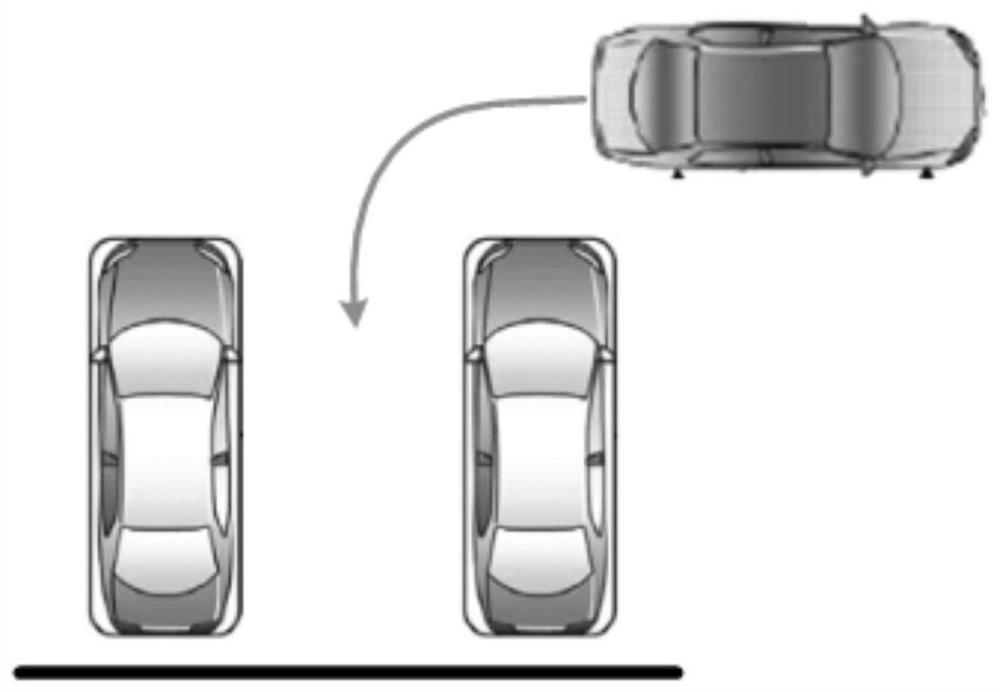
图2为边界车位位置与全景影像区域示意图;
图3为人机交互界面示意图。
具体实施方式
下面对照附图,通过对实施例的描述,本发明的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理、制造工艺及操作使用方法等,作进一步详细的说明,以帮助本领域技术人员对本发明的发明构思、技术方案有更完整、准确和深入的理解。
自动泊车系统主要由环境感知单元和定位单元构成,环境感知单元包括采集车辆四周障碍物信息的雷达单元、以及采集车辆四周围影像信息的摄像头单元,用于感应车辆周围状态信息,定位单元获取汽车当前坐标,并根据当前汽车坐标调取处所在位置的电子地图,定位单元和环境感知单元输出信号至自动泊车系统处理器,处理器与车载屏幕通信。
人机交互界面涵盖人与车进行交互的多种不同媒介,包括车内的音响娱乐主机大屏、手机、平板电脑等。在人机交互界面上增加电子地图界面,形成全景影像界面和电子地图界面的双界面拼接显示。当备选车位未超出全景影像范围时,全景影像界面将显示备选车位实景及车位标记;当备选车位超出全景影像范围时,系统根据所记忆的车位坐标,在电子地图上显示车位标记,系统对车位的记忆距离应和电子地图区域相当,保证系统所有记忆车位均能显示。双界面拼接显示时,显示全部的全景影像界面,因为全景影像界面最为真实,也方便用户观察周围障碍物信息,自动泊车影像中全景影像界面无法显示的区域显示电子地图界面,电子地图界面作为备用图片信息,仅显示全景影像界面无法显示的区域,即电子地图界面中间区域删除显示全景影像界,若车辆当前所在位置没有电子地图界面,或者处于地下停车场等无法获得电子地图界面的区域,则可以以纯色背景代替。
如图1(a)中所示,由车辆或障碍物围成的车位被称为边界车位,如图1(b)中所示,由地面标记(油漆线等)确定的车位被称为标线车位。早期的智能泊车辅助系统一般仅配置有超声波雷达一种传感器,可识别到边界车位。新一代的智能泊车辅助系统可同时配置全景影像摄像头和超声波雷达两种传感器,能同时识别边界车位和标线车位两种车位类型。
如图2所示,智能泊车辅助系统使用超声波雷达识别边界车位的原理要求搜索车位时,车辆必须前行驶过可用的边界车位一段距离,使雷达完整探测到车位尺寸(宽度+深度)及车位前后边界车/障碍物的尺寸,再在系统确认符合设计定义后,才会确认识别到边界车位。由于全景影像区域有限,当智能泊车辅助系统识别到边界车位时,车位的位置往往不在全景影像区域内。此时智能泊车辅助系统只能提示用户发现到车位,但无法在全景影像界面上直接标识出车位的位置。若系统同时识别到多个边界车位,人机交互界面更无法同时将所有可用车位提供给用户备选。因此,泊车系统开始运行时仅显示全景影像界面,当车辆运行泊车系统时行驶过程中发现边界车位,将全景影像界面向发现有边界车位方向延伸构成自动泊车影像,并标记出所有发现的边界车位,当然也可以在泊车系统开始运行,供用户选择是否开启自动泊车影像。
如图3所示,将智能泊车辅助系统的人机交互界面分成两个区域,一个区域为原有全景影像界面、另一个区域为电子地图界面,全景影像界面与电子地图界面直接进行拼接,且拼接后两个界面应视为处于同一坐标系下完整视图。智能泊车辅助系统利用全景影像摄像头及超声波雷达识别到可用的备选车位后,应记忆备选车位坐标,车位最大记忆距离和电子地图显示区域相当,以保证系统识别到的所有备选车位均能显示在全景影像界面或电子地图界面上。
若系统记忆的车位坐标处于全景影像区域范围内,则在全景影像界面上显示对应的备选车位标记;若车位坐标处于全景影像区域范围外,则在电子地图界面上直接显示车位标记。电子地图界面上应用不同类型的车位标记区分标线车位与边界车位,保证用户可正确识别。
所有全景影像界面及电子地图界面上标记出的备选车位,用户均可选择其作为目标车位进行泊入。用户选择目标车位后,人机交互界面上应显示一条虚拟的泊车轨迹线,标识出车辆将要泊入的路线。
上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
- 一种基于自动泊车系统的目标车位选择方法及其系统
- 基于目标车位激活自动泊车的系统、方法及计算机可读存储介质