一种苜蓿收获用割台作业姿态调整装置
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及牧草收获机械领域,更具体的说是一种苜蓿收获用割台作业姿态调整装置。
背景技术
畜牧业的发展离不开饲草饲料的生产和供给水平的提高。目前我国的苜蓿收获机械化水平较低,与发达国家同类机具相比存在自动化、数字化、机电液一体化程度不高,技术性能不稳定,可靠性差等问题。进一步加快苜蓿收获机械化技术及装备的智能化发展,对实现优质饲草料的均衡供应和促进草地畜牧业的可持续发展具有重要意义。
苜蓿的收获过程包括切割、压扁、集条等作业环节。其中切割过程中的苜蓿割茬高度会对后续生长的苜蓿品质产生很大的影响,均匀一致的割茬高度可使后续生长的苜蓿具有更好的品质[4]。确保苜蓿割茬的均匀一致性可通过调整作业过程中割台对地平行度及对地高度的方式来实现。目前国内相关苜蓿收获机械多通过作业前调节、固定好割台的方式来确保苜蓿割茬高度,但这样的操作并不能使割台具备随地仿形、自动调节作业姿态的能力,割台仍会在收获作业过程中随地面起伏,进而导致产生割茬高度不均匀的问题。小型窄幅苜蓿收获机械受此影响还相对较小,但对于割幅较宽的大型苜蓿收获机械影响就略显严重。以割台宽度5m为例,当割台与地面存在1°的夹角时,割台左右两侧端点处的苜蓿割茬高度差就会达到87mm。如果割茬基准高度处于割台中心,则两端割茬高度偏离设定高度达43mm左右。
为了解决上述问题,使作业机具在遇到地面起伏的情况下,割台能够自动调整作业姿态,随时保持与地面平行,割台对地高度通过不断调整始终保持在设定高度,设计一种苜蓿收获用割台作业姿态调整装置。
发明内容
本发明提供一种苜蓿收获用割台作业姿态调整装置,其有益效果为本发明可以调整割台作业姿态。
本发明涉及牧草收获机械领域,更具体的说是一种苜蓿收获用割台作业姿态调整装置,包括割台台面、侧座、横滑杆、倾角传感器、弹簧座、地轮杆和地轮,本发明可以调整割台作业姿态。
所述割台台面的左右两侧均横向滑动连接有横滑杆,两个横滑杆的外端均固定连接有侧座,两个侧座的上侧均固定连接有弹簧座,两个弹簧座上均连接有张紧弹簧,两个地轮杆的中部分别铰接在两个侧座的外侧,两个地轮杆与两个侧座的铰接位置均设置有倾角传感器,两个张紧弹簧的另一端分别连接在两个地轮杆的上部,两个地轮杆的下端均转动连接有地轮。
所述苜蓿收获用割台作业姿态调整装置还包括电机、等长杆、升降块和丝杠,割台台面的中部固定连接有电机,电机的输出轴上固定连接有丝杠,升降块的左右两端均铰接有等长杆,两个等长杆的另一端分别铰接在两个横滑杆的内端,丝杠通过螺纹与升降块相配合。
所述苜蓿收获用割台作业姿态调整装置还包括挡杆、手调杆和L形座,两个侧座的外侧后部均固定连接有L形座,两个L形座上均在前后方向上滑动连接有手调杆,手调杆通过螺钉压紧的方式固定在L形座上,两个手调杆的前端均固定连接有挡杆,两个挡杆分别位于两个地轮杆的前侧。
所述苜蓿收获用割台作业姿态调整装置还包括水平传感器、测距传感器I 和测距传感器II,两个侧座的前侧均设置有测距传感器II,割台台面的前侧设置有测距传感器I,割台台面的上侧中部设置有水平传感器。
所述苜蓿收获用割台作业姿态调整装置还包括凸片、油缸I、矩形框、凸轴、限位环和前轴,割台台面的上侧后部固定连接有凸片,矩形框的前侧固定连接有前轴,前轴转动连接在凸片上,前轴上固定连接有两个限位环,两个限位环分别位于凸片的前后两侧,矩形框的前侧固定连接有凸轴,割台台面的左部铰接有油缸I,油缸I的另一端转动连接在凸轴上。
所述苜蓿收获用割台作业姿态调整装置还包括横轴、后座、槽杆、支撑臂和油缸II,矩形框上固定连接有横轴,后座前侧的左右两端均固定连接有支撑臂,两个支撑臂的前端均转动连接在横轴上,后座的下部铰接有油缸II,油缸 II的上端铰接在矩形框的后侧上部,后座的后侧固定连接有槽杆,槽杆上设置有多个螺纹孔。
所述苜蓿收获用割台作业姿态调整装置还包括横条、螺杆、双轴电机、转臂和横移座,横条的左右两端分别固定连接在割台台面下侧的左右两端,横条的下侧中部固定连接有双轴电机,双轴电机的左右两端的输出轴上均固定连接有螺杆,横条的左右两端均滑动连接有横移座,两个螺杆通过螺纹分别与两个横移座相配合,两个转臂的后端分别转动连接在两个横移座的上侧。
所述苜蓿收获用割台作业姿态调整装置还包括油缸III、滑套、横柱、齿条、圆杆和齿轮,两个齿轮分别固定连接在两个转臂的后部上侧,横条的上侧中部固定连接有前后方向的油缸III,横柱的中部固定连接在油缸III的后端,横柱的左右两端均滑动连接有滑套,每个滑套的前侧均固定连接有齿条和圆杆,两个齿条分别与两个齿轮的外侧啮合传动,两个圆杆分别与两个齿条的内侧相接触。
本发明一种苜蓿收获用割台作业姿态调整装置的有益效果为:
本发明一种苜蓿收获用割台作业姿态调整装置,本发明可以调整割台作业姿态。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
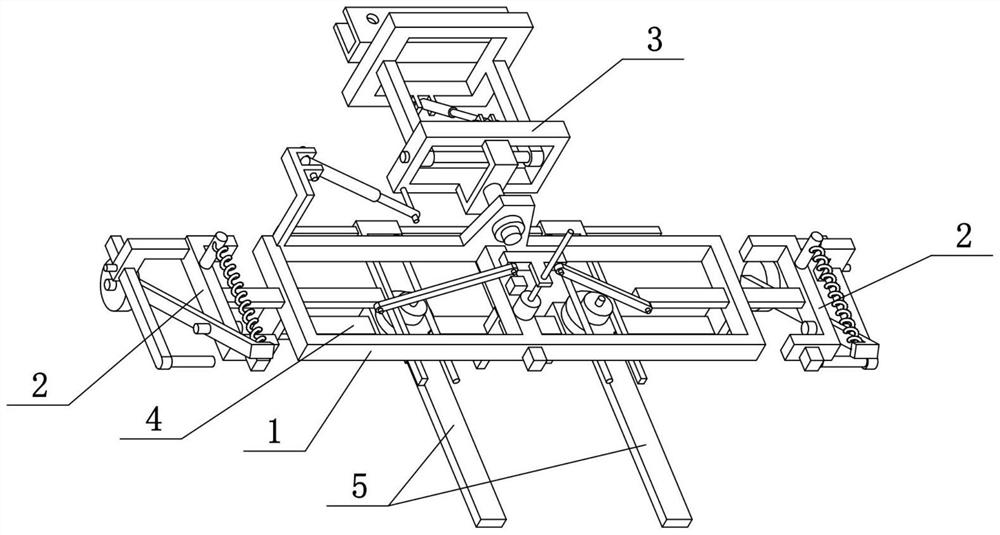
图1为本发明一种苜蓿收获用割台作业姿态调整装置的整体结构示意图一;
图2为本发明一种苜蓿收获用割台作业姿态调整装置的整体结构示意图二;
图3为割台台面的结构示意图;
图4为侧座的结构示意图一;
图5为侧座的结构示意图二;
图6为矩形框的结构示意图;
图7为横条和转臂的结构示意图一;
图8为横条和转臂的结构示意图二。
图中:割台台面1;水平传感器101;电机102;测距传感器I103;等长杆 104;升降块105;丝杠106;凸片107;油缸I108;侧座2;横滑杆201;倾角传感器202;测距传感器II203;弹簧座204;地轮杆205;挡杆206;手调杆 207;L形座208;地轮209;矩形框3;凸轴301;横轴302;限位环303;前轴 304;后座305;槽杆306;支撑臂307;油缸II308;横条4;油缸III401;滑套402;横柱403;齿条404;圆杆405;螺杆406;双轴电机407;转臂5;齿轮501;横移座502。
具体实施方式
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
具体实施方式一:
下面结合图1-8说明本实施方式,本发明涉及牧草收获机械领域,更具体的说是一种苜蓿收获用割台作业姿态调整装置,包括割台台面1、侧座2、横滑杆201、倾角传感器202、弹簧座204、地轮杆205和地轮209,本发明可以调整割台作业姿态。
所述割台台面1的左右两侧均横向滑动连接有横滑杆201,两个横滑杆201 的外端均固定连接有侧座2,两个侧座2的上侧均固定连接有弹簧座204,两个弹簧座204上均连接有张紧弹簧,两个地轮杆205的中部分别铰接在两个侧座2 的外侧,两个地轮杆205与两个侧座2的铰接位置均设置有倾角传感器202,两个张紧弹簧的另一端分别连接在两个地轮杆205的上部,两个地轮杆205的下端均转动连接有地轮209。两个横滑杆201分别可以在割台台面1的左右两端左右滑动,进而调整两个地轮杆205相对于割台台面1的左右位置,割台台面1 下降,两个张紧弹簧分别可以使两个地轮209与地面相接触,两个地轮209随地面起伏,地轮杆205摆动引起地轮杆205与割台台面1夹角的变化,该角度即可反映割台台面1的对地姿态,两个倾角传感器202测试出两个地轮杆205 的倾角。在实际应用中,只需实现割台台面1对地平行度以及割台台面1对地高度的调节就可满足苜蓿留茬均匀一致的要求。通过比较左右两侧地轮杆205 与割台台面1夹角即可判断割台台面1对地面的平行程度。左右两侧夹角差值绝对值越小割台与地面越接近于平行,当为0时可以认为割台与地面平行。将割台台面1调整至与地面平行即可满足苜蓿留茬均匀一致。两个侧座2左右移动时可以根据需要调整两个地轮209的间距,进而适应本发明对不同宽度地面进行适应性调整。
具体实施方式二:
下面结合图1-8说明本实施方式,所述苜蓿收获用割台作业姿态调整装置还包括电机102、等长杆104、升降块105和丝杠106,割台台面1的中部固定连接有电机102,电机102的输出轴上固定连接有丝杠106,升降块105的左右两端均铰接有等长杆104,两个等长杆104的另一端分别铰接在两个横滑杆201 的内端,丝杠106通过螺纹与升降块105相配合。电机102带动丝杠106转动时,进而带动升降块105进行升降,升降块105进行升降通过两个等长杆104 分别带动两个横滑杆201相互靠近或者远离,进而带动两个侧座2相互靠近或者远离,进而调整两个地轮209的间距。
具体实施方式三:
下面结合图1-8说明本实施方式,所述苜蓿收获用割台作业姿态调整装置还包括挡杆206、手调杆207和L形座208,两个侧座2的外侧后部均固定连接有L形座208,两个L形座208上均在前后方向上滑动连接有手调杆207,手调杆207通过螺钉压紧的方式固定在L形座208上,两个手调杆207的前端均固定连接有挡杆206,两个挡杆206分别位于两个地轮杆205的前侧。手调杆207 可以在L形座208上前后滑动,进而带动挡杆206前后滑动,挡杆206挡在地轮杆205的前侧,进而根据需要调整地轮杆205的转动角度范围。
具体实施方式四:
下面结合图1-8说明本实施方式,所述苜蓿收获用割台作业姿态调整装置还包括水平传感器101、测距传感器I103和测距传感器II203,两个侧座2的前侧均设置有测距传感器II203,割台台面1的前侧设置有测距传感器I103,割台台面1的上侧中部设置有水平传感器101。测距传感器I103和测距传感器 II203用来在切割苜蓿时进行过测距,水平传感器101用来测试割台台面1的水平程度。
具体实施方式五:
下面结合图1-8说明本实施方式,所述苜蓿收获用割台作业姿态调整装置还包括凸片107、油缸I108、矩形框3、凸轴301、限位环303和前轴304,割台台面1的上侧后部固定连接有凸片107,矩形框3的前侧固定连接有前轴304,前轴304转动连接在凸片107上,前轴304上固定连接有两个限位环303,两个限位环303分别位于凸片107的前后两侧,矩形框3的前侧固定连接有凸轴301,割台台面1的左部铰接有油缸I108,油缸I108的另一端转动连接在凸轴301上。油缸I108伸缩时可以带动割台台面1和凸片107在前轴304上转动,进而调整割台台面1在左右方向的水平程度。
具体实施方式六:
下面结合图1-8说明本实施方式,所述苜蓿收获用割台作业姿态调整装置还包括横轴302、后座305、槽杆306、支撑臂307和油缸II308,矩形框3上固定连接有横轴302,后座305前侧的左右两端均固定连接有支撑臂307,两个支撑臂307的前端均转动连接在横轴302上,后座305的下部铰接有油缸II308,油缸II308的上端铰接在矩形框3的后侧上部,后座305的后侧固定连接有槽杆306,槽杆306上设置有多个螺纹孔。油缸II308伸缩时带动矩形框3以横轴 302的轴线为轴转动,进而带动割台台面1以横轴302的轴线为轴转动,在前后方向上调整割台台面1的水平程度。
具体实施方式七:
下面结合图1-8说明本实施方式,所述苜蓿收获用割台作业姿态调整装置还包括横条4、螺杆406、双轴电机407、转臂5和横移座502,横条4的左右两端分别固定连接在割台台面1下侧的左右两端,横条4的下侧中部固定连接有双轴电机407,双轴电机407的左右两端的输出轴上均固定连接有螺杆406,横条4的左右两端均滑动连接有横移座502,两个螺杆406通过螺纹分别与两个横移座502相配合,两个转臂5的后端分别转动连接在两个横移座502的上侧。双轴电机407转动时可以带动两个螺杆406同时转动,进而带动两个横移座502相互靠近或者远离,进而带动两个转臂5的后部相互靠近或者远离,两个转臂5 上用来设置割刀,进而调整两个转臂5的位置进而调整转臂5上割刀的位置,进而对不同位置的苜蓿进行收获。
具体实施方式八:
下面结合图1-8说明本实施方式,所述苜蓿收获用割台作业姿态调整装置还包括油缸III401、滑套402、横柱403、齿条404、圆杆405和齿轮501,两个齿轮501分别固定连接在两个转臂5的后部上侧,横条4的上侧中部固定连接有前后方向的油缸III401,横柱403的中部固定连接在油缸III401的后端,横柱403的左右两端均滑动连接有滑套402,每个滑套402的前侧均固定连接有齿条404和圆杆405,两个齿条404分别与两个齿轮501的外侧啮合传动,两个圆杆405分别与两个齿条404的内侧相接触。油缸III401前后移动时带动横柱 403前后移动,进而带动两个滑套402前后移动,进而带动两个齿条404前后移动,两个齿条404前后移动时对两个齿轮501进行转动,进而同时带动两个转臂5转动,进而转动调整转臂5上割刀的位置,进而对不同位置的苜蓿进行收获。两个滑套402可以左右滑动,进而使得两个齿条404分别可以随着两个齿轮501移动,两个圆杆405对两个齿条404进行限位,进而使得两个齿条404 始终可以与两个齿轮501啮合传动。
本发明的工作原理:两个横滑杆201分别可以在割台台面1的左右两端左右滑动,进而调整两个地轮杆205相对于割台台面1的左右位置,割台台面1 下降,两个张紧弹簧分别可以使两个地轮209与地面相接触,两个地轮209随地面起伏,地轮杆205摆动引起地轮杆205与割台台面1夹角的变化,该角度即可反映割台台面1的对地姿态,两个倾角传感器202测试出两个地轮杆205 的倾角。在实际应用中,只需实现割台台面1对地平行度以及割台台面1对地高度的调节就可满足苜蓿留茬均匀一致的要求。通过比较左右两侧地轮杆205 与割台台面1夹角即可判断割台台面1对地面的平行程度。左右两侧夹角差值绝对值越小割台与地面越接近于平行,当为0时可以认为割台与地面平行。将割台台面1调整至与地面平行即可满足苜蓿留茬均匀一致。两个侧座2左右移动时可以根据需要调整两个地轮209的间距,进而适应本发明对不同宽度地面进行适应性调整。电机102带动丝杠106转动时,进而带动升降块105进行升降,升降块105进行升降通过两个等长杆104分别带动两个横滑杆201相互靠近或者远离,进而带动两个侧座2相互靠近或者远离,进而调整两个地轮209 的间距。手调杆207可以在L形座208上前后滑动,进而带动挡杆206前后滑动,挡杆206挡在地轮杆205的前侧,进而根据需要调整地轮杆205的转动角度范围。测距传感器I103和测距传感器II203用来在切割苜蓿时进行过测距,水平传感器101用来测试割台台面1的水平程度。油缸I108伸缩时可以带动割台台面1和凸片107在前轴304上转动,进而调整割台台面1在左右方向的水平程度。油缸II308伸缩时带动矩形框3以横轴302的轴线为轴转动,进而带动割台台面1以横轴302的轴线为轴转动,在前后方向上调整割台台面1的水平程度。双轴电机407转动时可以带动两个螺杆406同时转动,进而带动两个横移座502相互靠近或者远离,进而带动两个转臂5的后部相互靠近或者远离,两个转臂5上用来设置割刀,进而调整两个转臂5的位置进而调整转臂5上割刀的位置,进而对不同位置的苜蓿进行收获。油缸III401前后移动时带动横柱 403前后移动,进而带动两个滑套402前后移动,进而带动两个齿条404前后移动,两个齿条404前后移动时对两个齿轮501进行转动,进而同时带动两个转臂5转动,进而转动调整转臂5上割刀的位置,进而对不同位置的苜蓿进行收获。两个滑套402可以左右滑动,进而使得两个齿条404分别可以随着两个齿轮501移动,两个圆杆405对两个齿条404进行限位,进而使得两个齿条404 始终可以与两个齿轮501啮合传动。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种苜蓿收获用割台作业姿态调整装置
- 一种苜蓿收获用割台作业姿态调整装置