基于裂纹传感的压电式多维传感器
文献发布时间:2023-06-19 09:38:30
技术领域
本发明属于力传感器技术领域,具体涉及一种基于裂纹传感的压电式多维传感器。
背景技术
目前六维传感器的设计主要是基于电阻应变片的原理。中国专利CN111272328A中,提出了一种高灵敏度低耦合的六维传感器,其结构简单、维间耦合度低,可测量六个维度的力和力矩,但其测量精度易受环境温度的影响且可进一步提高,同时众多应变片需要额外使用供电电压进行工作,功耗相对较高。
因此,针对上述技术问题,有必要提供一种基于裂纹传感的压电式多维传感器。
发明内容
本发明的目的在于提供一种基于裂纹传感的压电式多维传感器,该基于裂纹传感的压电式多维传感器可以将外部力信号转换为电压输出,在保证极高灵敏度的同时,具有结构简单,无需外部供电电压等优点,以解决现有技术中的问题。
为了实现上述目的,本发明一实施例提供的技术方案如下:
一实施例中,提供了一种基于裂纹传感的压电式多维传感器,包括:
形变梁,包括多轴方向延伸的测试梁;
若干裂纹传感元件,固定于所述测试梁的表面,所述裂纹传感元件包括基体、裂纹以及压电材料,所述裂纹沿所述基体一侧内凹形成且在厚度方向上贯穿所述基体,所述裂纹具有一尖端部,所述压电材料设于所述裂纹尖端部一侧的基体上。
作为本发明的进一步改进,所述测试梁的表面开设有凹槽,每个凹槽内分别配合设置有一所述裂纹传感元件,所述裂纹传感元件的侧面与凹槽的侧壁贴合固定。
作为本发明的进一步改进,所述凹槽具有一呈开放设置的侧面,所述裂纹传感元件的裂纹设置方向垂直于该侧面。
作为本发明的进一步改进,所述凹槽为正方形。
作为本发明的进一步改进,所述形变梁还包括一环形的基底,所述测试梁的底端支撑固定于所述基底上。
作为本发明的进一步改进,所述测试梁包括x向横梁和y向横梁,所述x向横梁的水平表面上嵌设有用于测量y向力的裂纹传感元件,所述y向横梁的水平表面上嵌设有用于测量x向力的裂纹传感元件。
作为本发明的进一步改进,用于测量x向力的裂纹传感元件分别为R1和R2,粘贴于y向横梁的水平表面凹槽内,且关于x轴对称,裂纹的开口方向与x轴平行。
作为本发明的进一步改进,用于测量y向力的裂纹传感元件分别为R3和R4,粘贴于x向横梁的水平表面凹槽内,且关于y轴对称,裂纹的开口方向与y轴平行。
作为本发明的进一步改进,所述x向横梁和/或所述y向横梁上还嵌设有用于测量z向力的裂纹传感元件R5和R6,粘贴于x向横梁的竖直表面凹槽内,且关于y轴对称,裂纹的方向与z轴平行,和/或,粘贴于y向横梁的竖直表面凹槽内,且关于x轴对称,裂纹的方向与z轴平行。
作为本发明的进一步改进,所述测试梁还包括矩形横梁,所述矩形横梁自所述x向横梁和/或所述y向横梁的末端统一沿顺时针方向或逆时针方向延伸设置,所述矩形横梁上嵌设有用于测量x向力矩、y向力矩、z向力矩的裂纹传感元件。
以x向横梁和y向横梁所在直线作为x向和y向,则垂直于x向横梁和y向横梁的方向为z向,x向横梁和y向横梁的末端各连接一根所述矩形横梁,形成“卍”字结构。
作为本发明的进一步改进,还包括垂直梁,沿垂直于“卍”字梁所在平面方向设置,所述垂直梁的顶端与对应矩形横梁的末端相连,所述垂直梁的底端均与所述基底相连。
作为本发明的进一步改进,所述基底为矩形环形外框。
作为本发明的进一步改进,测量x向力矩的裂纹传感元件分别为R7和R8,粘贴于与x向横梁相连的矩形横梁的竖直表面凹槽内,且关于y轴对称,其裂纹的方向与z轴平行。
作为本发明的进一步改进,测量y向力矩的裂纹传感元件分别为R9和R10,粘贴于与y向横梁相连的矩形横梁的竖直表面凹槽内,且关于x轴对称,其裂纹的方向与z轴平行。
作为本发明的进一步改进,测量z向力矩的裂纹传感元件分别为R11、R12、R13和R14,粘贴于与x向横梁和y向横梁相连的矩形横梁的上表面凹槽内,且关于原点对称,其裂纹的方向指向多维传感器内部。
作为本发明的进一步改进,所述x向横梁、y向横梁、矩形横梁和矩形外框的纵截面以及垂直梁的横截面均为正方形。
作为本发明的进一步改进,所述x向横梁和y向横梁构成十字横梁,所述十字横梁的中心设置有施力孔,用于力和力矩的施加。
与现有技术相比,本发明的有益效果为:
(1)基于裂纹尖端应力集中效应,外部施加的力可以通过十字横梁或矩形横梁的变形被裂纹传感元件精准的捕捉放大,故而测量灵敏度极高。
(2)裂纹传感元件中采用的压电材料可以直接将力信号转换成电信号输出,无需额外使用供电电压进行工作,减少了结构的复杂性,节省能耗。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
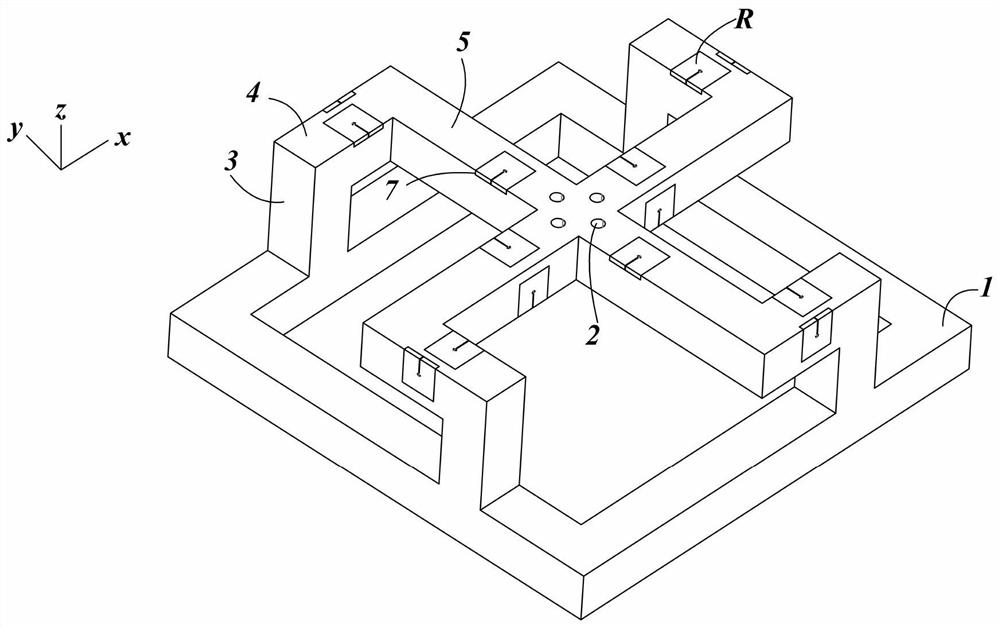
图1是本申请一实施方式中一种基于裂纹传感的压电式多维传感器的整体结构示意图;
图2是本申请一实施方式中裂纹传感元件嵌入位置局部示意图;
图3是本申请一实施方式中裂纹传感元件位置示意图1;
图4是本申请一实施方式中裂纹传感元件位置示意图2。
具体实施方式
以下将结合附图所示的各实施方式对本发明进行详细描述。但该等实施方式并不限制本发明,本领域的普通技术人员根据该等实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
参考图1所示,本申请一实施例提供了一种基于裂纹传感的压电式多维传感器,包括矩形外框1、形变梁、垂直梁3和裂纹传感元件R。
形变梁被构造成“卍”字梁,形变梁包括十字横梁5以及自十字横梁5末端统一沿顺时针方向或逆时针方向延伸的四根矩形横梁4,“卍”字梁的十字横梁5以及矩形横梁4上对称开设有14个正方形凹槽7,每个凹槽7具有一呈开放设置的侧面,凹槽7用于裂纹传感元件R的安装;十字横梁5的中心优选设置有四个施力孔2,用于力和力矩的施加。
十字横梁5的两根横梁分别称为x向横梁和y向横梁,其所在直线作为x轴和y轴,垂直于十字横梁的方向为z轴。
垂直梁3为四根,均沿z轴布设(垂直于“卍”字梁所在平面方向),垂直梁3的顶端与对应矩形横梁4的末端相连,垂直梁3的底端均与矩形外框1相连。
十字横梁5、矩形横梁4和矩形外框1的纵截面以及垂直梁3的横截面均优选为正方形。
参考图2所示,裂纹传感元件R嵌设于凹槽7内且与凹槽7的侧面固定设置,分别用于x向力、y向力、z向力、x向力矩、y向力矩、z向力矩的测量。
其中,测量x向力、y向力、z向力的裂纹传感元件R均嵌在十字横梁5的凹槽中,测量x向力矩、y向力矩、z向力矩的裂纹传感元件均嵌在矩形横梁4上。
嵌入在横梁凹槽7中的裂纹传感元件R,其和横梁凹槽7接触的三个侧表面通过强力胶粘附结合,其下表面和凹槽底面之间自由接触,以确保裂纹传感元件R能够顺利张开闭合。
裂纹传感元件R包括基体8、裂纹9以及压电材料10,基体8被构造成与凹槽7形状相匹配的形状,裂纹9自凹槽7呈开放设置的侧面沿基体8内凹形成且在厚度方向上贯穿基体8,裂纹9具有一尖端部,压电材料10嵌设于裂纹9尖端部一侧的基体8上,用于将裂纹8产生的振动信号转化为电信号。
裂纹传感元件R有若干个,本实例中,优选共有14个裂纹传感元件R,对应编号分别R1、R2、R3、R4、R5、R6、R7、R8、R9、R10、R11、R12、R13、R14,摆放位置如图3和图4所示,所有裂纹传感元件R,除编号外,完全相同。
裂纹传感元件R在压缩和拉伸时,压电材料10表面有电荷输出,通过后续电路处理转换为电压输出,相同外力大小条件下,压缩和拉伸时的电压输出相反。
具体的,在本实施例中:
构成x方向力测量的裂纹传感元件分别为R1、R2,嵌入在y向横梁水平表面凹槽中(上表面或者下表面都可),且关于x轴对称,其裂纹朝向为x方向。
构成y方向力测量的裂纹传感元件分别为R3、R4,嵌入在x向横梁水平表面凹槽中(上表面或者下表面都可),且关于y轴对称,其裂纹朝向为y方向。
构成z方向力测量的裂纹传感元件分别为R5、R6,嵌入在x向横梁的竖直表面凹槽内(右侧竖直表面或左侧竖直表面都可),且关于y轴对称,其裂纹朝向为z方向。
在其他实施例中,构成z向力测量的裂纹传感元件R5和R6,还可以粘贴于十字横梁中y向横梁的竖直表面凹槽内,且关于x轴对称,裂纹的方向与z轴平行。
构成x方向力矩测量的裂纹传感元件分别为R7、R8,嵌入与x向横梁相连的矩形横梁4的外侧表面凹槽内,且关于y轴对称,其裂纹朝向为z方向。
构成y方向力矩测量的裂纹传感元件分别为R9、R10,嵌入与y向横梁相连的矩形横梁4的外侧表面凹槽内,且关于x轴对称,其裂纹朝向为z方向。
构成z方向力矩测量的裂纹传感元件分别为R11、R12、R13、R14,嵌入与十字横梁5相连的矩形横梁4的上表面凹槽内,且关于原点对称,其裂纹方向指向传感器内部。
本实施例传感器的测量原理如下:
输入力作用于施力孔2,横梁由于力的作用而产生弯曲变形,横梁上裂纹传感元件R中的裂纹会由于横梁的变形而产生压缩和拉伸的效果,此时裂纹尖端会产生应力集中效应,尖端区域内的压电材料由于尖端应力产生电荷,并通过外接电路转化成电压输出,且压缩和拉伸所产生的电压有正负之分,即可以通过电压的正负值判断各轴的受力方向。具体而言:
(1)当x向的正向力作用于六维传感器时,y向横梁产生弯曲变形,裂纹传感元件R1、R2在x方向会受到横梁变形的挤压,使得裂纹尖端产生应力集中效应,从而尖端区域内的压电材料会产生电荷输出,并通过外接电路转换成电压输出,根据电压输出大小,可以判断x方向力的大小,当x向的负向力作用于六维传感器时,电压输出与正向力相反。
(2)当y向的正向力作用于六维传感器时,x向横梁产生弯曲变形,裂纹传感元件R3、R4在y方向会受到横梁变形的拉伸,使得裂纹尖端产生应力集中效应,从而尖端区域内的压电材料会产生电荷输出,并通过外接电路转换成电压输出,根据电压输出大小,可以判断y方向力的大小,当y向的负向力作用于六维传感器时,电压输出与正向力相反。
(3)当z向的正向力作用于六维传感器时,x向横梁产生弯曲变形,裂纹传感元件R5、R6在x方向会受到横梁变形的挤压,使得裂纹尖端产生应力集中效应,从而尖端区域内的压电材料会产生电荷输出,并通过外接电路转换成电压输出,根据电压输出大小,可以判断z方向力的大小,当z向的负向力作用于六维传感器时,电压输出与正向力相反。
(4)当x向顺时针力矩作用于六维传感器时,x向横梁相连的矩形横梁会产生弯曲变形,裂纹传感元件R7、R8在x方向会受到矩形横梁变形的拉伸,使得裂纹尖端产生应力集中效应,从而尖端区域内的压电材料会产生电荷输出,并通过外接电路转换成电压输出,根据电压输出大小,可以判断x向顺时针力矩的大小,当x向逆时针力矩力作用于六维传感器时,电压输出与顺时针力矩相反。
(5)当y向顺时针力矩作用于六维传感器时,y向横梁相连的矩形横梁会产生弯曲变形,裂纹传感元件R9、R10在x方向会受到矩形横梁变形的拉伸,使得裂纹尖端产生应力集中效应,从而尖端区域内的压电材料会产生电荷输出,并通过外接电路转换成电压输出,根据电压输出大小,可以判断y向顺时针力矩的大小,当y向逆时针力矩力作用于六维传感器时,电压输出与顺时针力矩相反。
(6)当z向顺时针力矩作用于六维传感器时,十字横梁相连的矩形横梁会产生弯曲变形,裂纹传感元件R11、R12、R13、R14在x方向会受到矩形横梁变形的拉伸,使得裂纹尖端产生应力集中效应,从而尖端区域内的压电材料会产生电荷输出,并通过外接电路转换成电压输出,根据电压输出大小,可以判断z向顺时针力矩的大小,当z向逆时针力矩力作用于六维传感器时,电压输出与顺时针力矩相反。
与现有技术相比,本发明的有益效果为:
(1)基于裂纹尖端应力集中效应,外部施加的力可以通过十字横梁或矩形横梁的变形被裂纹传感元件精准的捕捉放大,故而测量灵敏度极高。
(2)裂纹传感元件中采用的压电材料可以直接将力信号转换成电信号输出,无需额外使用供电电压进行工作,减少了结构的复杂性,节省能耗。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施例加以描述,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 基于裂纹传感的压电式多维传感器
- 基于铁磁平板对接焊缝裂纹检测的交流漏磁传感器及使用其进行裂纹检测的方法