一种移动洗碗机器人
文献发布时间:2023-06-19 09:40:06
技术领域
本发明涉及机器人技术领域,尤其是涉及一种移动洗碗机器人。
背景技术
全自动洗碗机从工作方式上分为:蓝传式全自动洗碗机和履带拔齿式全自动洗碗机两种,蓝传式全自动洗碗机顾名思义就是需要先把餐具装框,然后进行除渣、粗细、清洗、精洗、消毒烘干,然后卸框,整个过程相对比较麻烦,而履带拔齿式全自动洗碗机操作起来就相对方便快捷,只要直接将脏的餐具无序摆放在拔齿上面即可进行除渣、粗细、清洗、精洗、消毒烘干,无须装框和卸框这两个过程,更省时省力,目前的洗碗机器人主要是采用机械臂原理实现自动洗碗,这种机器人只适用于实验室或大饭店等场合,不适用于家庭;
市面上已经有很多洗碗机,现有的洗碗机对食物残渣不能做到较好的处理,往往需要定期的人为进行清理,由于洗碗机多为固定式放置或安装,由此就限制了洗碗机需要就近洗碗池使用,便于进行连接进水管,同时洗碗机电源端需要连接插座进行使用,存在一定的安全隐患,如此一来就造成了洗碗池使用空间有限,不能得到充分使用,传统刷碗机的使用具有一定的局限性,不能根据房屋的结构自由的灵活使用,为此,我们提出一种移动洗碗机器人。
发明内容
本发明的目的是提供一种具有移动使用、便于除渣清理、安全性能良好、使用灵活、自动定位、智能程度高的一种移动洗碗机器人,解决了现有技术中的问题。
本发明的上述发明目的是通过以下技术方案得以实现的:一种移动洗碗机器人,包括主体和清洗池,其特征在于:所述主体顶部设置有清洗池,所述主体右端设置有排污管,所述主体内部清洗装置左侧设置有水泵,所述水泵左侧设置有充电接口,所述水泵下方设置有净水槽,所述净水槽一端设置有进水管,所述净水槽下方设置有隔板,所述隔板下方设置有蓄电池;
所述清洗池右侧设置有电荷耦合器,所述电荷耦合器下方设置有微控制器,所述微控制器一侧设置有定位器,所述清洗池下端连接有碎渣机,所述碎渣机一侧设置有排污泵,所述排污泵下方设置有污水槽。
本发明进一步设置为:所述主体底部安装有驱动轮,所述驱动轮均布在主体底部四角位置,且所述驱动轮表面均设置有防滑层。
通过采用上述技术方案,通过驱动轮设置可以有效的保证该装置可以在室内灵活使用,同时防滑层的设计可以有效的保证机器人行进过程中的稳定性。
本发明进一步设置为:所述清洗池内部一侧装配有洗碗机,所述清洗池与洗碗机分别通过管道连接净水槽。
通过采用上述技术方案,通过搭载洗碗机使用对清洗餐具可以不受位置限制,更加灵活使用,同时清洗池可以满足日常清洗使用,达到方便快捷的目的。
本发明进一步设置为:所述净水槽底部通过管道连接水泵进水端,所述水泵出水端通过管道连接清洗池。
通过采用上述技术方案,通过净水槽设计可以保证在断水的情况下对餐具进行清洗,使用程度高,同时清洗池也可对日常的果蔬进行清洗,增加该装置的实用性能。
本发明进一步设置为:所述清洗池底部通过管道连接碎渣机输入口,所述碎渣机输出口通过管道连接污水槽,所述污水槽底部通过排污泵与排污管连接。
通过采用上述技术方案,通过碎渣机对食物残渣进行粉碎处理便于排出,防止堵塞管道。
本发明进一步设置为:所述驱动轮采用电动驱动,所述蓄电池与驱动轮之间通过线缆电性连接。
通过采用上述技术方案,通过采用电动驱动方式便于驱动机器人进行移动,通过驱动轮进行传输动力,便于进行移动使用,同时电动驱动可以起到环保作用。
本发明进一步设置为:所述充电接口输入端通过线缆连接外部电源,所述充电接口输出端通过线缆连接蓄电池,所述蓄电池输出端通过线缆分别与水泵、电荷耦合器、定位器、微控制器、碎渣机和排污泵电性连接。
通过采用上述技术方案,通过充电接口连接内置蓄电池,可以保证该装置可以进行移动使用或固定使用两种方式,提高该装置使用的灵活性,通过采用电荷耦合器能够把光学影像转化为数字信号,对实时场景进行识别,对房间布局进行识别,避免出现碰撞的情况。
综上所述,本发明的有益技术效果为:
1.本一种移动洗碗机器人在使用过程中,在结构上,当该装置固定使用时,进水管处与自来水管进行连接,排污管处与下水道管进行连接,通过充电接口启动该装置,自来水从净水槽中通过水泵向清洗池输送,食物残渣等固体通过碎渣机进行处理,随自来水被冲入污水槽中,随后通过排污泵冲入下水道中进行清理,避免了人为定期清理残渣的繁琐步骤;
2.在结构上,当该装置需要移动使用时,通过微控制器对房屋地图进行导入,便于该机器人对房屋进行储存,通过蓄电池提供该装置的运行动力,在移动过程中通过电荷耦合器对实时路况进行分析,并通过定位器实现到达指定的位置,便于该装置在不同位置进行使用,在净水槽中储存一定量的自来水,启动该装置,对餐具进行清洗,清洗完成的污水储存在污水槽中,当该装置移动至下水道时,通过管道连接排污管与下水道,对污水进行排放,以达到使用灵活的目的,而且结构简单,实用性强。
附图说明
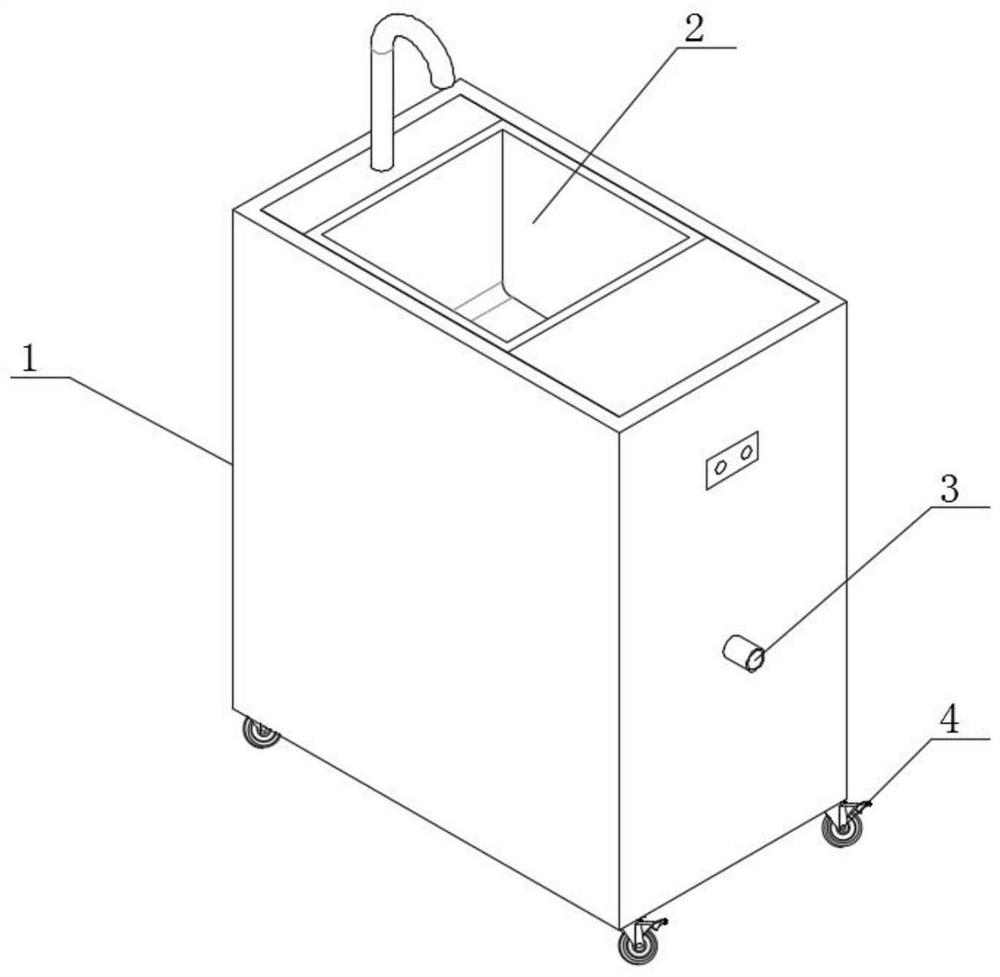
图1是本发明一种移动洗碗机器人的整体结构示意图;
图2是本发明一种移动洗碗机器人的内部结构示意图。
图中,1、主体;2、清洗池;3、排污管;4、驱动轮;5、水泵;6、充电接口;7、进水管;8、净水槽;9、隔板;10、蓄电池;11、电荷耦合器;12、定位器;13、微控制器;14、碎渣机;15、排污泵;16、污水槽。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
参照图1和图2,为本发明公开的一种移动洗碗机器人,包括主体1和清洗池2,主体1顶部设置有清洗池2,主体1右端设置有排污管3,主体1内部清洗装置左侧设置有水泵5,水泵5左侧设置有充电接口6,水泵5下方设置有净水槽8,净水槽8一端设置有进水管7,清洗池2下端连接有碎渣机14,碎渣机14一侧设置有排污泵15,排污泵15下方设置有污水槽16;
在本实施例中,在结构上,当该装置需要进行固定式使用时,主体1的进水管7处与自来水管进行连接,保证有充足的清洗水源,排污管3处与下水道管进行连接,便于及时的对污水进行排放,通过充电接口6连接外部电源以启动该装置,自来水从净水槽8中通过水泵5向清洗池2输送,食物残渣等固体通过碎渣机14进行处理,达到粉碎的目的,可随自来水被冲入污水槽16中,避免出现管道堵塞的情况,随后通过排污泵15冲入下水道中进行清理,在实际应用中,也可根据实际需要更改净水槽8和污水槽16的布置方式和连接方式,在这里不做具体限定。
如图1和图2所示,主体1底部安装有驱动轮4,驱动轮4均布在主体1底部四角位置,主体1顶部设置有清洗池2,净水槽8下方设置有隔板9,隔板9下方设置有蓄电池10,清洗池2右侧设置有电荷耦合器11,电荷耦合器11下方设置有微控制器13,微控制器13一侧设置有定位器12,排污泵15下方设置有污水槽16;
在本实施例中,当该装置需要移动使用时,通过驱动轮4驱动该装置进行移动,通过微控制器13对房屋地图进行导入,便于该机器人对房屋布局进行储存,通过蓄电池10提供该装置的运行动力,隔板9对蓄电池10起到保护作用,防止有水渗入影响蓄电池10的使用寿命,在移动过程中通过电荷耦合器11对实时路况进行分析,并通过定位器12实现到达指定的位置,便于该装置在不同位置进行使用,在净水槽8中储存一定量的自来水,启动该装置,对餐具进行清洗,清洗完成的污水储存在污水槽16中,当该装置移动至下水道时,通过管道连接排污管3与下水道,对污水进行排放,以达到使用灵活的目的。
参照图1,主体1底部安装有驱动轮4,驱动轮4均布在主体1底部四角位置,且驱动轮4表面均设置有防滑层,通过驱动轮4设置可以有效的保证该装置可以在室内灵活使用,同时防滑层的设计可以有效的保证机器人行进过程中的稳定性。
参照图2,清洗池2内部一侧装配有洗碗机,清洗池2与洗碗机分别通过管道连接净水槽8,通过搭载洗碗机使用对清洗餐具可以不受位置限制,更加灵活使用,同时清洗池2可以满足日常清洗使用,达到方便快捷的目的。
参照图2,净水槽8底部通过管道连接水泵5进水端,水泵5出水端通过管道连接清洗池2,通过净水槽8设计可以保证在断水的情况下对餐具进行清洗,使用程度高,同时清洗池2也可对日常的果蔬进行清洗,增加该装置的实用性能。
参照图2,清洗池2底部通过管道连接碎渣机14输入口,碎渣机14输出口通过管道连接污水槽16,污水槽16底部通过排污泵15与排污管3连接,通过碎渣机14对食物残渣进行粉碎处理便于排出,防止堵塞管道。
参照图2,驱动轮4采用电动驱动,蓄电池10与驱动轮4之间通过线缆电性连接,通过采用电动驱动方式便于驱动机器人进行移动,通过驱动轮4进行传输动力,便于进行移动使用,同时电动驱动可以起到环保作用。
参照图2,充电接口6输入端通过线缆连接外部电源,充电接口6输出端通过线缆连接蓄电池10,蓄电池10输出端通过线缆分别与水泵5、电荷耦合器11、定位器12、微控制器13、碎渣机14和排污泵15电性连接,通过充电接口6连接内置蓄电池10,可以保证该装置可以进行移动使用或固定使用两种方式,提高该装置使用的灵活性,通过采用电荷耦合器11能够把光学影像转化为数字信号,对实时场景进行识别,对房间布局进行识别,避免出现碰撞的情况。
本实施例的实施原理为:
本发明一种移动洗碗机器人,在结构上,当该装置需要进行固定式使用时,主体1的进水管7处与自来水管进行连接,保证有充足的清洗水源,排污管3处与下水道管进行连接,便于及时的对污水进行排放,通过充电接口6连接外部电源以启动该装置,自来水从净水槽8中通过水泵5向清洗池2输送,食物残渣等固体通过碎渣机14进行处理,达到粉碎的目的,可随自来水被冲入污水槽16中,避免出现管道堵塞的情况,随后通过排污泵15冲入下水道中进行清理,当该装置需要移动使用时,通过驱动轮4驱动该装置进行移动,通过微控制器13对房屋地图进行导入,便于该机器人对房屋布局进行储存,通过蓄电池10提供该装置的运行动力,隔板9对蓄电池10起到保护作用,防止有水渗入影响蓄电池10的使用寿命,在移动过程中通过电荷耦合器11对实时路况进行分析,并通过定位器12实现到达指定的位置,便于该装置在不同位置进行使用,在净水槽8中储存一定量的自来水,启动该装置,对餐具进行清洗,清洗完成的污水储存在污水槽16中,当该装置移动至下水道时,通过管道连接排污管3与下水道,对污水进行排放,以达到使用灵活的目的,以解决现有技术中存在的技术问题。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明;因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种移动洗碗机器人
- 一种洗碗机的移动喷淋控制方法、洗碗机及存储介质