一种用于飞行拍摄效率最优的柔性速度规划方法
文献发布时间:2023-06-19 09:40:06
技术领域
本发明属于高速高加速点到点运动速度规划技术领域,涉及一种用于飞行拍摄的效率最优的柔性速度规划方法。
背景技术
半导体后道封装的效率和精度一定程度上决定了集成电路行业的竞争力,高精度表面贴装技术(SMT)对保证半导体产品性能至关重要。在SMT中,为确保贴装精确度,需要机器视觉辅助检测工件位置,以保证芯片最终的贴合精度。传统的静态拍摄需设备停稳后进行检测,不必要的停顿造成贴装效率的降低。随着视觉检测中工业相机的性能提高,使得待检测工件匀速运动时的拍摄技术逐渐成熟。然而相较于静止拍摄而言,具有末端速度约束的速度规划难度较大。运行速度控制不合理极易引起速度衔接处加速度的不连续进而导致速度波动,引起设备的振动,增加检测拍摄的调整时间,进而影响整个贴片工艺的效率。针对此,常用的方法是减小运行过程的最大速度以减小设备振动,但这同样会降低贴片的效率。为了提高贴片工艺的效率,一方面需要保证运行平稳性的同时提高运行速度,另一方面需要降低检测过程中所需的时间,合理的规划效率最优的柔性速度曲线,配合工业相机的动态检测技术,可以使设备在保持匀速运行时实现工艺过程中芯片位姿的识别,从而缩短整个工艺时间,提高封装贴片效率。因此研究一种效率最优的点到点柔性速度规划方法对提高半导体封装工艺的效率具有重要意义。
高会军等人的专利“贴片机Y轴伺服电机的速度规划方法”,专利公开号CN103760828A。该专利为了解决数字控制器的信号频率与计算频率存在偏差造成控制精度低的问题,提出了一种贴片机Y轴伺服电机的离散速度规划方法,但该方法不适用于直接位置控制;黎明森等人的专利“一种飞拍方法、系统以及芯片键合方法、系统”,专利公开号CN110995986A。该专利为避免电机在拍照点停下检测导致键合头的震动使图像不清晰,提出了飞拍方法以及系统的工作原理,但是没有进行相关速度规划方面的工作。
发明内容
本发明针对现有技术缺陷,发明了一种用于飞行拍摄效率最优的柔性速度规划方法。该方法首先根据电机性能约束设置运行加加速度、加速度以及运行中最大速度等信息,基于电机参数约束,求解速度区间可行域;然后以边界速度为约束,基于S型速度曲线过渡,计算加、减速段运行时间与完成加、减速过渡所需位移;其次基于给定位移约束,更新S型速度曲线加、减速段运行时间,并计算匀速段时间,从而得到整个效率最优的柔性速度曲线的时间分配关系;然后依据速度时间关系,规划点到点的运行速度;最后虑及视觉检测的二维位置偏差,主运动方向采用效率最优的速度规划方法补偿,次运动方向以最优平稳性为目标设计速度曲线进行位置补偿。所提出方法适用于具有边界速度约束的飞行拍摄过程,对提高封装装片效率与精度,改善运行过程平稳性方面具有重要作用,为半导体封装中高速高精度运动控制提供了理论与技术支持。
本发明的技术方案是一种用于飞行拍摄效率最优的柔性速度规划方法,该方法首先根据电机性能约束设置运行加加速度、加速度以及运行中最大速度等信息,基于电机参数约束,求解速度区间可行域,以便于速度曲线的设计;然后根据边界速度约束,计算S型速度曲线加/减速段运行时间与所需位移;其次基于给定位移约束,以寻求最大运行速度为目标,更新S型速度曲线加、减速段运行时间,并计算匀速段时间,从而得到整个柔性速度曲线的时间分配关系;然后依据速度时间关系,规划点到点的运行速度;最后基于视觉检测的二维位置偏差,主运动方向采用效率最优的速度规划方法补偿,次运动方向以最优平稳性为目标设计速度曲线进行位置补偿。方法的具体步骤如下:
步骤1:基于电机参数约束的速度区间可行域求解;
在高速贴片机的运行过程中,可将其视为二维平面内多次点到点运动。以其中一次点到点运动为例,起点时间定义为t
式中,J
通过计算起始点与结束点的边界速度约束,进而得到速度可行域。对于加速度过程,速度时间之间的关系满足:
式中,v(t)表示在t时刻时的速度。为了求出速度的上、下限值,需要将最大加、减速度代入方程(2),得到速度的不等式关系:
v(t)≤v
v(t)≥v
同样的在减速段运行过程中,可通过逆向求解,可以得到减速过程中速度与时间的关系:
式中,
基于此,可以计算出起始和结束位置的速度约束包络曲线。考虑电机的最大运行速度与给定位移的关系,在给定位移约束下,可能存在达到最大速度和未达到最大速度两种情况。由此可根据直线电机的参数得到速度可行域,所设计的速度曲线应满足在可行区间范围内。
步骤2:边界速度约束的加/减速段时间精确求解方法;
起始点A的速度是v
当t∈[0,T
a(t)=J
由此,对于给定的加速段的加速度J
当t∈[T
a(t)=a
v(t)=v(T
当t∈[T
a(t)=a(T
由公式(8)-(16),可计算得到S型速度曲线加速段的时间满足:
当
当
由此,可以计算出从点A到点B加速过程中的时间序列t
式中,v
同理,可以计算得到S型速度曲线减速段的时间满足:
当
当
根据此时间段,逆向求解可计算出减速段从A点到B点所需的最小位移:
步骤3:基于位移约束的效率最优S型速度曲线时间段更新;
为了充分缩短点A到点B运行时间,提高运行效率,在运行过程中应达到最大速度。假设给定的位移x
式中,x
考虑到给定的实际距离可能不足以加速到最大速度。因此,根据A、B两点给定的位移x
情况一:给定位移x
考虑起始点速度v
情况二:位移x
从点A运行到点B时,无法先达到最大速度,此时加速度没有达到电机设定的最大加速度。为使效率最优为目标,设运行可达到的最大速度为v′
根据给定位移约束x
x
利用二分数值法求解上式可精确得到运行中达到的最大速度v′
情况三:位移x
从点A运行到点B时,可达到最大速度v
根据线性电机的性能参数,考虑边界速度和位移约束,可以合理地得到时间序列t
步骤4:基于S型速度曲线的点到点速度规划与位置补偿方法;
通过步骤3中基于位移约束下的S型速度曲线时间段求解方法可计算出S型速度曲线各段时间,然后根据S型速度曲线的加加速度与时间之间的关系为:
对加加速度J进行一次积分、二次积分和三次积分,分别得到兼顾效率与平稳性的点到点运动的加速度-时间、速度-时间、位移-时间表达式为:
基于以上分析,通过公式(30)-(32)可以确定任意时刻t
本发明的显著效果和益处是一种用于飞行拍摄效率最优的柔性速度规划方法提出了一种兼顾效率与平稳的点到点快速速度规划方法,有效的解决了点到点运行过程中平均速度低或运行平稳性差的问题,避免高速运行平稳性差与平稳运行效率低的现象,对提高两点之间高速运行的效率,改善运行平稳性具有重要意义。在运行过程中,以最大性能发挥电机加加速度为目标,通过始末位置的边界速度约束,推导S型速度曲线的各段时间分配关系;然后考虑两点之间位移约束,通过正逆向求解方法更新速度曲线各个时间段;最后,根据S型曲线位移时间以及速度时间的关系,规划起始点到终点的速度曲线,从而实现兼顾效率与平稳性的点到点的速度规划。该方法在保证运行平稳的同时提高运行的效率,实现视觉检测过程的高效平稳。该方法用于规划半导体设备封装及检测加工过程,可以改善直线电机运行的平稳性,同时兼顾封装或检测效率,对高效封装装片具有重要意义。
附图说明
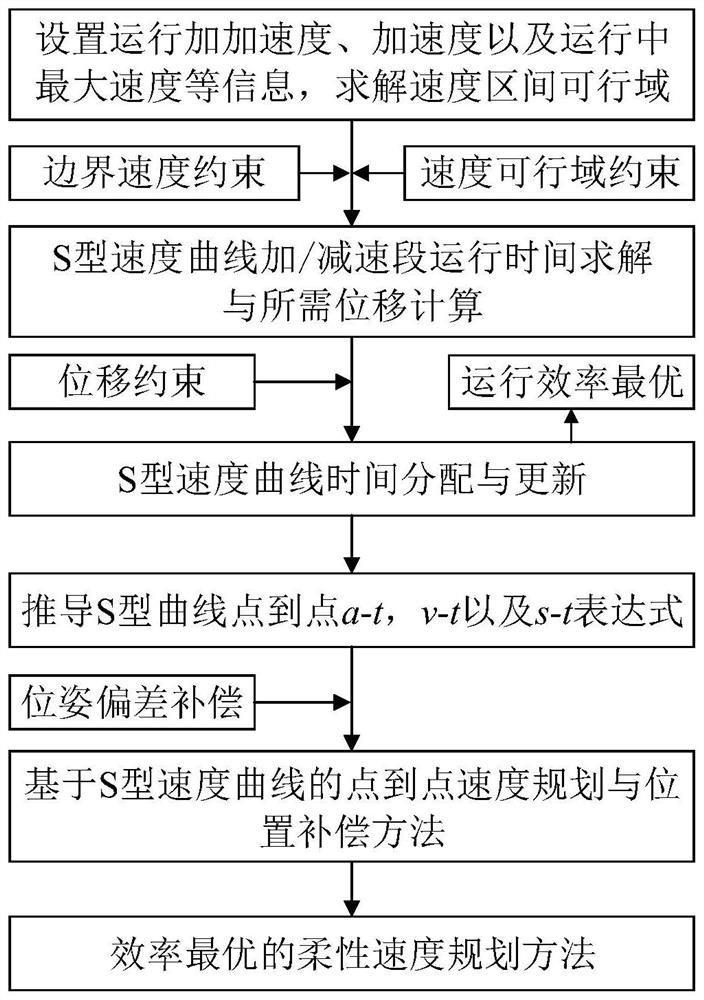
图1效率最优的点到点柔性速度规划方法整体流程图。
图2飞行拍摄检测过程示意图,其中C
图3a)表示AC
图3b)表示AC
图4a)表示整个过程X轴方向的运行速度与时间曲线,其中横坐标表示时间,单位s,纵坐标表示速度,单位m/s;
图4b)表示整个过程X轴方向的位移与时间曲线,其中横坐标表示时间,单位s,纵坐标表示位移,单位m。
图5a)表示整个过程Y轴方向在C
图5b)表示整个过程Y轴方向在C
图6—表示速度可行区域范围以及规划速度曲线,其中横坐标表示位移,单位m,纵坐标表示速度,单位m/s。
图7a)表示采用相同运行参数,静态视觉检测时整个X轴方向的速度时间曲线,其中横坐标表示时间,单位s,纵坐标表示速度,单位m/s;
图7b)表示采用相同运行参数,静态视觉检测时整个X轴方向的位移时间曲线,其中其中横坐标表示时间,单位s,纵坐标表示位移,单位m。
具体实施方式
结合技术方案与附图详细说明本发明的具体实施方式
半导体芯片封装过程中,从取片位置到贴片位置中存在中间检测环节以提高贴片精度。相较于静态图像位姿识别,飞行拍摄具有检测效率高的优点,但过程中需要控制芯片运行速度,因此合理规划运行过程中速度对保证检测精度,提高贴片合格率具有重要意义。针对静止检测难以满足高效贴片的需求,发明一种兼顾效率与平稳的点到点快速速度规划方法,方法的流程如附图1所示。
本发明针对飞拍过程中速度规划问题,通过MATLAB仿真速度规划曲线,详细说明本发明的具体实施过程。
首先,以取片位置坐标A(0,0)作为起点,贴片位置坐标B(200,0)作为终点。在芯片取放过程中,由于吸头的瞬间作用,导致芯片的位置和姿态发生偏差,从而影响芯片的贴片精度。为了避免这个问题,工业相机被用来识别芯片的位置和姿态的偏差,相机检测起点位置C
其次,根据边界速度约束,计算S型曲线加/减速段时间。将整个运行过程分段规划,首先规划取片位置到检测起始点的位移AC
然后,根据步骤3,以位移AC
最后,考虑到视觉检测过程中的位姿偏差,对于检测的轴的位置偏差Δx=0.2、Δy=-0.15,因此在C
根据实际运行工况进行分析,以AC
在C
为了说明飞行拍摄对于提高拍摄效率的优越性,设置电机参数与实际运行参数相同时,静止检测过程中速度时间曲线如附图7a)所示,位移时间曲线如附图7b)所示。对比附图4与附图7可以发现,在半导体封装检测过程中,静止视觉检测时因电机速度减为0而具有更长的运行时间,而飞行拍摄检测时保持匀速,速度不需要减小为0,故可明显缩短整个过程的时间,从而显著提高半导体封装效率。该规划方法对提高半导体封装检测效率具有重要意义,为实际提高IC封装中的高速贴片效率提供技术支持。
- 一种用于飞行拍摄效率最优的柔性速度规划方法
- 一种用于飞行拍摄效率最优的柔性速度规划方法