一种基于A-SFM三维重构算法的软岩地基表面变形监测方法
文献发布时间:2023-06-19 09:40:06
技术领域
本发明涉及一种软岩地基表面三维重构与变形监测方法,特别是公开了一种地基表面A-SFM三维重构算法和地基表面变形监测装置,属于地基变形监测领域。
背景技术
软岩广泛分布于我国中部、西南部等多个地区。随着国家经济建设的快速发展,越来越多的超高层建筑以软岩作为地基。现在最权威的地基承载力的确定方法是岩基载荷试验,但是此种方法只能确定承载力,不能得到地基在试验过程中的表面动态变形情况,无法得到其破坏模式及破坏范围。对岩基载荷试验过程中岩体表面进行三维重构,可以得到岩体表面的变形情况,有利于得到岩体的破坏模式及破坏范围。然而,现在相关的岩体地基表面三维重构设备设施相对罕见。
针对岩体表面变形的监测方法现有比较精准的测量方法为三维激光扫描,但是三维激光扫描技术有着高昂的硬件成本和劳动密集型的数据采集,无法有效地应用于岩基载荷试验中。考虑到试验现场尺寸、操作人员技术水平等限制,亟需一种智能、高效且安装便捷的方法来实现对岩基载荷试验过程中岩体表面变形的动态监测。
随着机器视觉测量技术的发展,针对软岩地基变形监测,有条件开发一种基于A-SFM三维重构算法的软岩地基表面变形监测方法,为建筑行业地基破坏模式及破坏范围的确定提供了一种高效、便捷的监测方法。
发明内容
本发明为了克服上述现有技术的不足,提供一种基于A-SFM三维重构算法的软岩地基表面变形监测方法。
为了实现上述目的,本发明提供了一种基于A-SFM三维重构算法的软岩地基表面变形监测方法。其中,该监测方法提供一种适用于软岩地基载荷试验场地条件的A-SFM的三维重构算法。采用全站仪获得待测区域的大地控制点坐标信息,之后用相机设备实时提取加载过程中软岩地基表面图像,通过重建软岩地基表面的三维图像,获得不同时刻地基表面得具体位置信息,从而获得加载过程中软岩地基表面得具体变形情况。
根据本发明的一实施例,A-SFM是由在图像处理中表现最好的AKAZE对传统的SFM-MVS方法进行优化而得到的一种三维重构算法。
该监测方法包括大地控制点获取、地基表面图像采集、特征点提取及特征点描述、特征向量匹配、稀疏重构、密集重建六个步骤,主要方法如下:
步骤一:大地控制点获取。通过全站仪采集地基载荷试验场地八个控制点的坐标信息,使得监测区域的水平位置和高程位置统一。
步骤二:地基表面图像采集。通过相机对地基表面进行图像采集,获得焦距信息,实现相机自标定;
步骤三:特征点提取及特征点描述。利用AKAZE特征检测算法进行特征点提取及特征点描述;
步骤四:特征向量匹配。在获得特征提取到的特征点之后,利用初始匹配对,建立匹配邻域,寻找所有的匹配点,主要利用欧式距离进行特征点对的筛选,若出现不满足阈值距离的结果,则从中去除;
步骤五:稀疏重构。选择好的图像对去初始化整个光束平差过程,首先对初始化选择的两幅图片进行第一次光束平差,然后循环添加新的图片进行新的光束平差,光束平差是一个迭代的过程,需要一直不停地对所有有效的图片进行计算,直到迭代结束。得到相机估计参数和场景几何信息,即稀疏的3D点云;
步骤六:密集重建。利用基础数据,在稀疏重建的基础上,再次对点云数据进行运算,获得更加稠密的点云数据,并利用获得的大地控制点的坐标信息将不同时域下获得的地基表面三维数据统一到同一坐标系下。
与传统的SFM算法相比,改进后的A-SFM三维重构算法不仅加快了三维重构的速度,并且在一定程度上增加了测量精度。
在本发明提供的一种A-SFM三维重构算法的基础之上,该监测方法提供了一种监测装置。该装置包括全站仪组件、支撑组件、梁组件、相机组件和位移计组件。全站仪组件包括全站仪、标志点、标志点托架。支撑组件包括稳定支座、可伸缩竖支撑梁。梁组件包括主梁、副梁、环形梁。相机组件包括相机、连接轴承、滚动滑轮。位移计组件包括位移计、位移计托架,位移计数据线。
根据本发明的一实施例,稳定支座与可伸缩支撑梁用螺栓连接,置于试验场地的四个角。主梁与可伸缩支架采用螺栓连接。副梁与主梁采用螺栓连接,副梁在主梁上的位置可根据试验需要自由调节位置。环形梁安装在副梁上,两侧设置有连接相机组件的连接装置。相机组件可在环形梁上自由移动。标志点托架安装于环形梁,用以固定标志点。位移计托架安装于副梁,用以固定位移计。
根据本发明的一实施例,可伸缩支撑梁为中空圆形钢梁,高度为50cm,可伸缩范围为20cm;可伸缩支架的顶部焊接有向两侧扩张的水平连接装置,水平连接装置上有用于螺栓连接的螺孔,长度为10cm;可伸缩支撑梁底部两侧有用于螺栓连接的螺孔,螺孔范围长度为10cm。稳定支座分为两部分,上部结构为带螺孔中空圆形钢梁,长度为10cm;下部结构为十字交叉的底板,底板与圆形钢梁之间采用焊接连接,底板长度为40cm。
根据本发明的一实施例,中部镂空主梁的总长度为300cm,宽度为10cm,两端底面带有条形镂空,长度为10cm,用以螺栓与可伸缩支撑梁间的固定连接,中部两侧带有条形镂空,长度为100cm,用以螺栓与副梁间的固定连接。中部不带镂空主梁的总长度为130cm,宽度为10cm,两端底面带有条形镂空,长度为10cm,用以螺栓与可伸缩支撑梁间的固定连接。
根据本发明的一实施例,副梁的长度为130cm,宽度为10cm,其底部设有条形镂空,镂空宽度为0.5cm,两端设有用以连接主梁的螺孔。环形梁宽度为5cm,高度为5cm,分为内环形梁和外环形梁。内环形梁的直径为50cm,外环形梁的直径为100cm。环形梁的顶部设有条形镂空,靠近千斤顶的一侧设有条形镂空用以连接相机组件,底部等间距设有8个螺孔用以连接标志点托架。
根据本发明的一实施例,连接轴承宽度3cm,可实现相机360°旋转。滚动滑轮长5cm,可实现绕环形梁实现360°环绕。
根据本发明的一实施例,标志点托架总长度为50cm,宽度为3cm。标志点托架顶部设有螺孔,底部设有放置标志点的水平延伸,延伸长度为5cm。
根据本发明的一实施例,位移计托架总长度为50cm,宽度为3cm。千分表托架顶部设有螺孔,底部设有放置千分表的水平延伸,延伸长度为5cm。
综上所述,本发明提供了一种基于A-SFM三维重构算法的监测方法用于监测软岩地基实时变形。该监测方法的建立,只需设定设定初始环境参数即可以实现智能实时监控,并且可以满足不同类型的软岩地基的监测需求。
为了让本发明的上述和其他目的、特征和优点能够更加明显易懂,下文举较佳实施例,并配合附图,做详细说明如下。
附图说明
图1所示本发明一实施提供的基于A-SFM三维重构算法的软岩地基表面变形监测流程图。
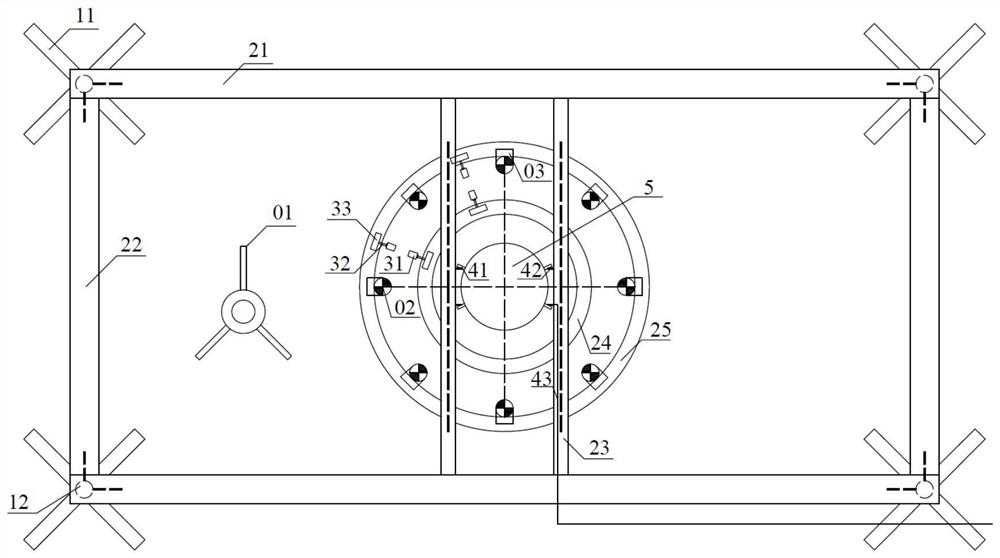
图2所示本发明一实施提供的基于A-SFM三维重构算法的软岩地基表面变形监测装置平面图。
图3所示本发明一实施提供的基于A-SFM三维重构算法的软岩地基表面变形监测装置立面图。
具体实施方式
如图1所示,本实施例提供的A-SFM的三维重构算法包括大地控制点获取、图像采集、三维重建。大地控制点获取方式为:将承压板周围等分为4个扇形区域,在扇形区域内放置总计8个标志点;利用全站仪获取8个标志点的位置信息。实施过程:将所有标志点贴附于标志点托架上,利用全站仪获得每个标志点的具体位置信息,进行加载,采用4台相机每隔180s采集拍摄区域图像,获得图像并利用算法进行三维重构获得变形情况。
如图1所示,于本实施例中,提供的A-SFM三维重构算法监测步骤如下:
步骤1:大地控制点获取。通过全站仪采集地基载荷试验场地待测区域的8个大地控制点的坐标信息;
步骤2:地基表面图像采集。通过相机对地基表面进行图像采集,获得焦距信息,实现相机自标定;
步骤3:特征点提取及特征点描述。利用AKAZE特征检测算法进行特征点提取及特征点描述;
步骤4:特征向量匹配。在获得特征提取到的特征点之后,利用初始匹配对,建立匹配邻域,寻找所有的匹配点,主要利用欧式距离进行特征点对的筛选,若出现不满足阈值距离的结果,则从中去除;
步骤5:稀疏重构。得到相机估计参数和场景几何信息,即稀疏的3D点云;
步骤6:密集重建。利用基础数据,在稀疏重建的基础上,再次对点云数据进行运算,获得更加稠密的点云数据,并利用获得的大地控制点坐标信息实现地基表面三维坐标信息的统一。
如图2所示内,于本实施例中,扇形区域内的标志点的直径为3-5cm。然而,本发明对此不做任何限定。
如图2至图3所示,本实施例提供的基于A-SFM三维重构算法的软岩地基表面变形监测装置包括包括全站仪组件(包括全站仪01、标志点02、标志点托架03)、支撑组件(包括稳定支座11、可伸缩竖支撑梁12)、梁组件(包括中部镂空主梁21、中部不带镂空主梁22、副梁23、内环形梁24、外环形梁25)、相机组件(相机31、连接轴承32、滚动滑轮33)和位移计组件(位移计41、位移计托架42,位移计数据线43)。
本实施例中,标志点托架03总长度为50cm,宽度为3cm,其顶部设有螺孔,底部设有放置标志点的水平延伸,延伸长度为5cm。稳定支座11的上部中空钢管结构长度为10cm,下部十字交叉支座长度40cm。可伸缩支撑梁12上部水平连接装置的长度为10cm。主梁21的总长度为300cm,宽度为10cm,两端底面带有条形镂空,镂空长度为10cm,用以螺栓与可伸缩支撑梁间的固定连接,中部两侧带有条形镂空,长度为100cm,用以螺栓与副梁间的固定连接。中部不带镂空主梁22总长度为130cm,宽度为10cm,两端底面带有条形镂空,长度为10cm,用以螺栓与可伸缩支撑梁间的固定连接。副梁23的长度为130cm,宽度为10cm,其底部设有条形镂空,镂空宽度为0.5cm,两端设有用以连接主梁的螺孔。内环形梁24与外环形梁25由两个半圆形环梁进行拼接,宽度为5cm,高度为5cm,内环形梁的直径为50cm,外环形梁的直径为100cm,环形梁顶部设有条形镂空,一侧设有条形镂空,底部设有等间距设有8处螺孔。连接轴承32宽度3cm,可实现相机360°旋转。滚动滑轮33长5cm,可实现绕环形梁实现360°环绕。位移计托架41总长度为50cm,宽度为3cm,其顶部设有螺孔,底部设有放置千分表的水平延伸,延伸长度为5cm。然而,本发明对此不作任何限定。考虑到加载的实际情况,于其它实施例中,上述数值根据实际情况酌情调整5cm至10cm。
本实例提供的基于A-SFM三维重构算法的软岩地基表面变形监测装置安装按以下步骤操作。
步骤一:首先,将伸缩竖向支撑梁12下部插入稳定支座11的上部钢管,并用螺栓进行固定;然后,将中部镂空主梁21与中部不带镂空主梁22的两端放在竖向支撑梁12的上部,并用螺栓进行加固;随后,寻找合适位置,将副梁23的两端与中部镂空主梁21的中部进行螺栓加固;最后,将4个滚动滑轮33放入环形梁内,寻找合适位置,分别将两个半圆形内环形梁24与外环形梁25与副梁进行螺栓连接,并最终组装成一个整体的环形梁。
步骤二:将滚动滑轮33、连接轴承32与相机31连接起来,调整相机位置与角度并将其固定于环形梁上,使其能够将扇形区域进行360°拍摄并能够将扇形区域全部拍摄于视野之中。
步骤三:连接位移计41、位移计托架42,安装于副梁23上合适位置,连接位移计数据线43,读数归零。
步骤四:先将标志点托架03安装于外环形梁上合适位置,然后把标志点贴附在标志点托架的水平延伸上。
虽然本发明已由较佳实施例揭露如上,然而并非用以限定本发明,任何熟知此技艺者,在不脱离本发明的精神和范围内,可作些许的更动与润饰,因此本发明的保护范围当视权利要求书所要求保护的范围为准。
- 一种基于A-SFM三维重构算法的软岩地基表面变形监测方法
- 一种基于双目视觉的蝴蝶形标志点软岩地基表面变形监测系统和装置