一种高空幕墙双足机器人
文献发布时间:2023-06-19 09:40:06
技术领域
本发明涉及高空幕墙清洗技术领域,具体涉及一种高空幕墙双足机器人。
背景技术
高空幕墙清洗机器人在清洁高空幕墙过程中,需要翻越障碍物才能实现更大的清洗覆盖面,现有的高空幕墙清洗机器人采用了多种越障方式,有四足式和螺旋桨协作式等。
四足清洗机器人有良好的稳定性,但是清洗效率低,越障能力差,不具有市场竞争力;螺旋桨协作清洗机器人,结构简单,但是越障过程中偏摆风险高,控制难度高。
发明内容
为此,本发明提供一种高空幕墙双足机器人,以解决现有技术中的上述问题。
为了实现上述目的,本发明提供如下技术方案:
根据本发明的第一方面,一种高空幕墙双足机器人,包括清洗单元、真空发生器、折叠腿部组件、自适应吸盘组件和气路管道,所述折叠腿部组件为两个,所述清洗单元上设置有所述真空发生器,每个所述折叠腿部组件的一端与所述清洗单元连接,每个所述折叠腿部组件的另一端和所述自适应吸盘组件连接,所述真空发生器通过所述气路管道与所述自适应吸盘组件连接。
进一步地,所述折叠腿部组件包括一级舵机、二级舵机和三级舵机,所述一级舵机通过螺钉与所述清洗单元紧固连接,所述二级舵机的一端与所述一级舵机之间通过螺钉紧固连接,所述二级舵机的另一端与所述三级舵机之间通过螺钉紧固连接,所述自适应吸盘组件与所述三级舵机连接,所述一级舵机、所述二级舵机以及所述三级舵机用于实现腿部抬起和放下的迈步动作。
进一步地,所述自适应吸盘组件包括吸盘本体、吸盘托架以及吸盘转动架,所述吸盘本体通过螺钉紧固连接在所述吸盘托架的一端,所述吸盘托架的另一端和所述吸盘转动架之间转动连接,所述吸盘转动架与所述三级舵机通过螺钉紧固连接。
进一步地,还包括销轴,所述销轴穿设在所述吸盘托架和吸盘转动架之间,所述吸盘托架通过所述销轴与所述吸盘转动架连接。
进一步地,还包括复位弹簧,所述复位弹簧为扭簧,所述复位弹簧的中部套设在所述销轴上,所述复位弹簧的一端卡接在所述吸盘托架上,所述复位弹簧的另一端卡接在所述吸盘转动架上。
进一步地,所述气路管道的两端分别与所述真空发生器及所述吸盘本体之间密封插接,用于实现自适应吸盘组件的吸附和脱离动作,从而配合所述一级舵机、所述二级舵机及所述三级舵机构成的所述折叠腿部组件完成迈步越障。
进一步地,所述吸盘本体的轴线与所述吸盘转动架的中轴线之间设置有夹角。
进一步地,所述吸盘转动架上开设有多个卡槽,多个所述卡槽的延伸方向沿所述销轴的径向方向,所述复位弹簧的端部卡接在任意一个所述卡槽内。
进一步地,所述真空发生器为两个,每个所述折叠腿部组件靠近所述清洗单元的一侧均设置有所述真空发生器。
进一步地,还包括护罩,所述护罩覆盖在所述真空发生器的外周侧。
本发明具有如下优点:本发明采用双足协作的方式,帮助清洗单元,越过障碍物;每条支撑腿为4关节结构,具有更大的越障高度;吸盘关节采用自适应结构,减小控制难度;本发明在保证清洗效率的同时,具有稳定的越障能力,能够越过较高的障碍高度,具有很大的竞争优势。
附图说明
为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
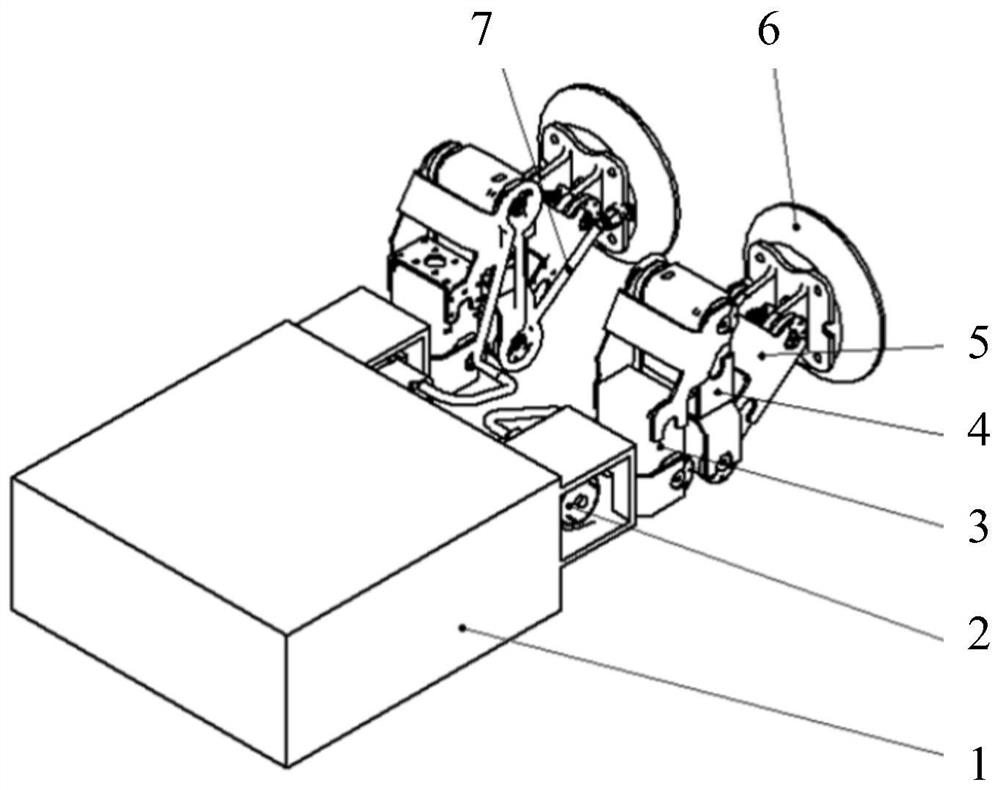
图1为本发明一些实施例提供的一种高空幕墙双足机器人的立体结构图。
图2为本发明一些实施例提供的一种高空幕墙双足机器人的自适应吸盘组件剖面结构图。
图3为本发明一些实施例提供的一种高空幕墙双足机器人的自适应吸盘组件立体图。
图4为本发明一些实施例提供的一种高空幕墙双足机器人的清洗作业过程中的折叠状态图。
图5为本发明一些实施例提供的一种高空幕墙双足机器人的清洗单元越障过程中伸展状态的结构图。
图中:1、清洗单元,2、真空发生器,3、一级舵机,4、二级舵机,5、三级舵机,6、自适应吸盘组件,7、气路管道,8、吸盘本体,9、吸盘托架,10、销轴,11、吸盘转动架,12、复位弹簧,13、幕墙,14、障碍物。
具体实施方式
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
如图1至图5所示,本实施例中的一种高空幕墙双足机器人,包括清洗单元1、真空发生器2、折叠腿部组件、自适应吸盘组件6和气路管道7,折叠腿部组件为两个,清洗单元1上设置有真空发生器2,每个折叠腿部组件的一端与清洗单元1连接,每个折叠腿部组件的另一端和自适应吸盘组件6连接,真空发生器2通过气路管道7与自适应吸盘组件6连接。
本实施例达到的技术效果为:本实施例采用双足协作的方式,帮助清洗单元,越过障碍物;每条支撑腿为4关节结构,具有更大的越障高度;吸盘关节采用自适应结构,减小控制难度;本发明在保证清洗效率的同时,具有稳定的越障能力,能够越过较高的障碍高度,具有很大的竞争优势。
实施例2
如图1至图5所示,本实施例中的一种高空幕墙双足机器人,包括实施例1中的全部技术特征,除此之外,折叠腿部组件包括一级舵机3、二级舵机4和三级舵机5,一级舵机3通过螺钉与清洗单元1紧固连接,二级舵机4的一端与一级舵机3之间通过螺钉紧固连接,二级舵机4的另一端与三级舵机5之间通过螺钉紧固连接,自适应吸盘组件6与三级舵机5连接,一级舵机3、二级舵机4以及三级舵机5用于实现腿部抬起和放下的迈步动作。
本实施例中的有益效果为:通过将折叠腿部组件设置为包括一级舵机3、二级舵机4和三级舵机5的结构形式,共三个舵机实现腿部抬起和放下的迈步动作,更大程度的提高越障能力。
实施例3
如图1至图5所示,本实施例中的一种高空幕墙双足机器人,包括实施例2中的全部技术特征,除此之外,自适应吸盘组件6包括吸盘本体8、吸盘托架9以及吸盘转动架11,吸盘本体8通过螺钉紧固连接在吸盘托架9的一端,吸盘托架9的另一端和吸盘转动架11之间转动连接,吸盘转动架11与三级舵机5通过螺钉紧固连接。
可选的,还包括销轴10,销轴10穿设在吸盘托架9和吸盘转动架11之间,吸盘托架9通过销轴10与吸盘转动架11连接。
可选的,还包括复位弹簧12,复位弹簧12为扭簧,复位弹簧12的中部套设在销轴10上,复位弹簧12的一端卡接在吸盘托架9上,复位弹簧12的另一端卡接在吸盘转动架11上。
本实施例中的有益效果为:通过设置复位弹簧12,实现了维持吸盘本体8的角度,在一定外力的作用下,吸盘本体8可以自由贴合在物体表面,实现自适应贴合。
实施例4
如图1至图5所示,本实施例中的一种高空幕墙双足机器人,包括实施例3中的全部技术特征,除此之外,,气路管道7的两端分别与真空发生器2及吸盘本体8之间密封插接,用于实现自适应吸盘组件6的吸附和脱离动作,从而配合一级舵机3、二级舵机4及三级舵机5构成的折叠腿部组件完成迈步越障。
可选的,吸盘本体8的轴线与吸盘转动架11的中轴线之间设置有夹角。
可选的,吸盘转动架11上开设有多个卡槽,多个卡槽的延伸方向沿销轴10的径向方向,复位弹簧12的端部卡接在任意一个卡槽内。
本实施例中的有益效果为:通过设置多个卡槽,实现了对吸盘本体8的任意角度的调整。
实施例5
如图1至图5所示,本实施例中的一种高空幕墙双足机器人,包括实施例4中的全部技术特征,除此之外,真空发生器2为两个,每个折叠腿部组件靠近清洗单元1的一侧均设置有真空发生器2。
可选的,还包括护罩,护罩覆盖在真空发生器2的外周侧,例如,护罩为U字形结构,护罩的敞口端通过螺钉紧固在清洗单元1的侧面上。
进一步的,还包括调节阀,气路管道7上设置有调节阀。
本实施例中的有益效果为:通过将真空发生器2设置为两个,实现了对每个吸盘本体8提供吸附所需的真空度;通过设置保护罩,实现了对真空发生器2的保护作用。
上述实施例的具体工作方式为:在清洗作业过程中,双足机器人保持收起状态,在需要越障时,双足机器人展开,使吸盘与幕墙贴合,然后真空发生器工作,使吸盘吸附到幕墙上,多级舵机协调工作,把清洗单元抬起,然后双腿交替行走,进行越障;图4示出了一种高空幕墙双足机器人作业过程中,在幕墙13上设置有障碍物14,清洗过程中,高空幕墙双足机器人的两个折叠腿部组件沿幕墙13行走并跨越障碍物14。
虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
- 一种高空幕墙双足机器人
- 一种建筑板材的高空幕墙系统及幕墙施工方法