电力转换装置及电力转换控制装置
文献发布时间:2023-06-19 09:47:53
技术领域
本发明的实施方式涉及电力转换装置及电力转换控制装置。
背景技术
已有这样的电力转换装置(间接交流转换装置:indirect AC converter),将从电源侧交流系统供给的第一多相交流电以间接转换方式转换成第二多相交流电。在对比较大的电力进行转换的电力转换装置中,有将单相转换器单元串联连接构成多电平转换器的电力转换装置。
另外,由于在电力转换装置的负载侧产生的事件等,供给至上述的第二多相交流电的各相的有功功率不平衡,其影响有时波及到供给上述的第一多相交流电的电源侧交流系统。
现有技术文献
专利文献
专利文献1:日本专利特开2008-301640号公报
发明内容
发明要解决的课题
本发明要解决的课题是提供一种电力转换装置及电力转换控制装置,减轻供给至电力转换装置的负载侧的有功功率的各相间的不平衡对电源侧交流系统的影响。
用于解决课题的手段
实施方式的电力转换装置具有第一电力转换器、多个DCDC转换装置和第二电力转换器。第一电力转换器,包括:多个第一正侧的臂;多个第一负侧的臂;第一正侧星形接线,将所述多个第一正侧的臂星形连接;第一负侧星形接线,将所述多个第一负侧的臂星形连接;以及第一端子,将所述第一正侧星形接线和所述第一负侧星形接线分别与电源侧交流系统的各相连接,所述多个第一正侧的臂和所述多个第一负侧的臂对所述电源侧交流系统的第一交流电和第一直流电进行相互转换。绝缘型的多个DCDC转换装置对所述第一直流电和所述第二直流电进行相互转换。第二电力转换器,包括:多个第二正侧的臂;多个第二负侧的臂;第二正侧星形接线,将所述多个第二正侧的臂星形连接;第二负侧星形接线,将所述多个第二负侧的臂星形连接;以及第二端子,将所述第二正侧星形接线和所述第二负侧星形接线分别与负载侧交流系统的各相连接,所述多个第二正侧的臂和所述多个第二负侧的臂对所述第二直流电和第二交流电进行相互转换。
附图说明
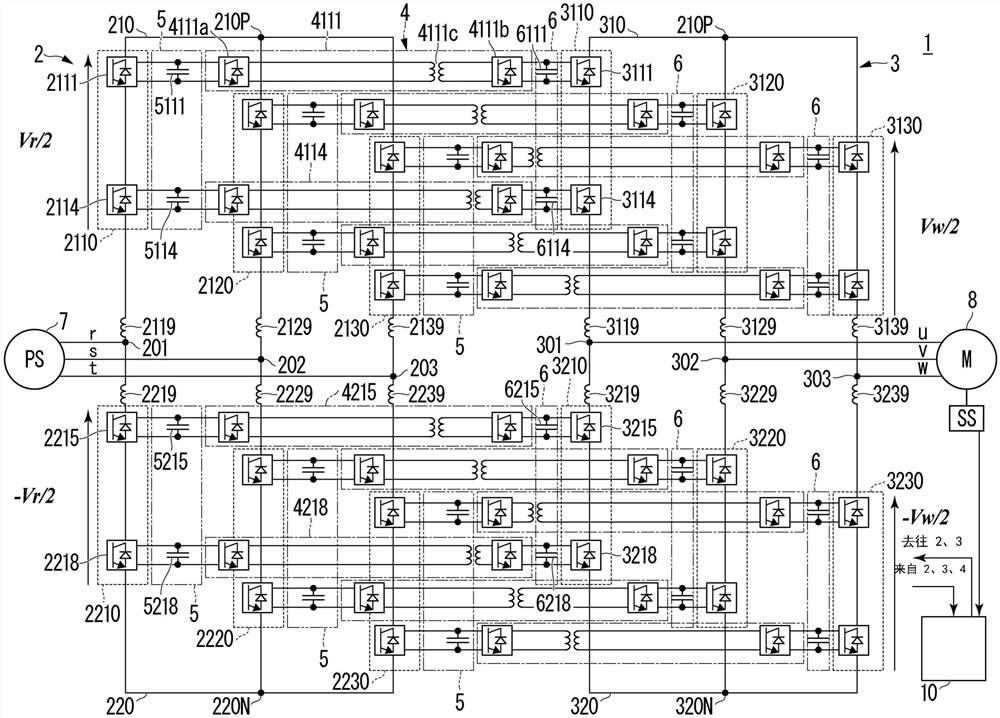
图1是实施方式的电力转换装置的结构图。
图2A是实施方式的单相转换器单元的结构图。
图2B是实施方式的单相转换器单元的结构图。
图3是用于说明实施方式的转换器的信号名称的定义的图。
图4是用于说明实施方式的逆变器的信号名称的定义的图。
图5是实施方式的控制部的结构图。
图6是实施方式的偏差量运算单元12011的结构图。
图7是实施方式的系统电流ACR1212的结构图。
图8是实施方式的臂平衡控制部1204的结构图。
图9是实施方式的第一低频脉动功率降低控制部1217的结构图。
图10是实施方式的第一循环电流ACR1213的结构图。
图11是实施方式的逆变器控制部13的结构图。
图12是实施方式的LF_PPS控制器1322的结构图。
具体实施方式
下面,参照附图对实施方式的电力转换装置及电力转换控制装置进行说明。以下说明的电力转换装置对作为负载的一例的交流电动机(电机)供给期望的交流电。实施方式的电力转换装置包括间接交流转换装置(indirect AC converter)。实施方式中的连接这一记述包括电连接。
图1表示电力转换装置的结构例。图1是实施方式的电力转换装置的结构图。
图1所示的电力转换装置1例如具有转换器2、逆变器3、DCDC转换装置组4、转换器侧电容器组5、逆变器侧电容器组6和控制部10。转换器2、逆变器3、DCDC转换装置组4、转换器侧电容器组5和逆变器侧电容器组6形成电力转换装置1的主电路。电源侧交流系统7例如对电力转换装置1供给多相交流电(第一交流电)。例如,电源侧交流系统7供给r相s相t相的三相交流电。负载侧交流系统8例如从电力转换装置1向负载装置供给多相交流电(第二交流电)。例如,负载侧交流系统8供给u相v相w相的三相交流电。
首先,对转换器2进行说明。
转换器2(第一电力转换器)对电源侧交流系统7的第一交流电和第一直流电进行相互转换。换言之,转换器2在动力运行时将第一交流电转换成第一直流电,在再生时将第一直流电转换成第一交流电。例如,转换器2具有与电源侧交流系统7的r相s相t相分别连接的第一交流连接端子201、202、203。转换器2与电源侧交流系统7之间经由第一交流连接端子201、202、203给予、接收第一交流电。
转换器2包括以中性点210P为中心的第一正侧星形接线210和以中性点220N为中心的第一负侧星形接线220。第一正侧星形接线210和第一负侧星形接线220各自的r相s相t相以星形分别与第一交流连接端子201、202、203连接。在不区分第一正侧星形接线210和第一负侧星形接线220的情况下,将它们统一简称为“转换器星形接线”。另外,上述的星形接线还可以是Y形接线。
转换器2具有r相第一臂2110、s相第一臂2120、t相第一臂2130、r相第二臂2210、s相第二臂2220、t相第二臂2230、和电抗器2119、2129、2139、2219、2229、2239。
在第一正侧星形接线210的r相设置有r相第一臂2110,在s相设置有s相第一臂2120,在t相设置有t相第一臂2130。将r相第一臂2110、s相第一臂2120、t相第一臂2130统一简称为“转换器第一臂”(多个第一正侧的臂)。
在第一负侧星形接线220的r相设置有r相第二臂2210,在s相设置有s相第二臂2220,在t相设置有t相第二臂2230。将r相第二臂2210、s相第二臂2220、t相第二臂2230统一简称为“转换器第二臂”(多个第一负侧的臂)。
换言之,在转换器星形接线的各相分别设置有转换器第一臂和转换器第二臂。转换器第一臂和转换器第二臂至少包括一个单相转换器单元(例如参照图2),对电源侧交流系统7的第一交流电和第一直流电进行相互转换。下面示出的事例的转换器第一臂和转换器第二臂分别具有4个单相转换器单元。该个数是一个例子,也可以是3个以下,还可以是5个以上。
例如,在r相第一臂2110设置有单相转换器单元2111~2114。在r相第二臂2210设置有单相转换器单元2215~2218。另外,在图1中省略单相转换器单元2112、2113、2216、2217的记载。对于s相和t相也是一样的,省略单相转换器单元的标号的记载。
上述的各单相转换器单元对电源侧交流系统7的第一交流电的一部分和上述的第一直流电的一部分进行相互转换。
如上所述,对于转换器2的转换器第一臂和转换器第二臂,按照每个臂将单相转换器单元串联连接而成的串联电路以星形接线方式进行连接。在转换器第一臂和转换器第二臂的各相设置有包括单相转换器单元的串联电路。
另外,如果将转换器第一臂和转换器第二臂直接连接,则在转换器2内流过短路电流。为了防止这一点,例如可以将转换器第一臂和转换器第二臂经由电抗器连接。在r相的情况下,经由电抗器2119和电抗器2219将r相第一臂2110和r相第二臂2210连接。对于s相和t相也是一样的。另外,上述的电抗器可以是在转换器第一臂和转换器第二臂分别设置的单相电抗器,还可以是结合电抗器。
转换器2的单相转换器单元与后述的DCDC转换装置组4中的一个DCDC转换装置和后述的转换器侧电容器组5中的一个第一电容器相对应。单相转换器单元的直流侧与DCDC转换装置组4中的一个DCDC转换装置的第一直流端子和转换器侧电容器组5中的一个第一电容器并联连接。
例如,单相转换器单元2111与电容器5111连接。单相转换器单元2114与电容器5114连接。对于图示省略的电容器5112、5113也是一样的。即,单相转换器单元2111~2114与电容器5111~5114连接。同样地,单相转换器单元2215~2218与电容器5215~5218连接。对于s相和t相也是一样的。其详细情况参照图3。上述的电容器5111~5114和电容器5215~5218等是第一电容器的一例。
下面,对逆变器3进行说明。
逆变器3(第二电力转换器)对第二直流电和第二交流电进行相互转换。换言之,逆变器3在动力运行时将第二直流电转换成第二交流电,在再生时将第二交流电转换成第二直流电。例如,逆变器3具有与负载侧交流系统8的u相v相w相分别连接的第二交流连接端子301、302、303。逆变器3和与负载侧交流系统8连接的负载装置M之间经由第二交流连接端子301、302、303给予、接收第二交流电。
逆变器3包括以中性点310P为中心的第二正侧星形接线310和以中性点320N为中心的第二负侧星形接线320。第二正侧星形接线310和第二负侧星形接线320各自的u相v相w相分别以星形与第二交流连接端子301、302、303连接。在不区分第二正侧星形接线310和第二负侧星形接线320的情况下,将它们统一简称为“逆变器星形接线”。
逆变器3具有u相第一臂3110、v相第一臂3120、w相第一臂3130、u相第二臂3210、v相第二臂3220、w相第二臂3230、和电抗器3119、3129、3139、3219、3229、3239。
在第二正侧星形接线310的u相设置有u相第一臂3110,在v相设置有v相第一臂3120,在w相设置有w相第一臂3130。将u相第一臂3110、v相第一臂3120、w相第一臂3130统一简称为“逆变器第一臂”(多个第二正侧的臂)。
在第二负侧星形接线320的u相设置有u相第二臂3210,在v相设置有v相第二臂3220,在w相设置有w相第二臂3230。将u相第二臂3210、v相第二臂3220、w相第二臂3230统一简称为“逆变器第二臂”(多个第二负侧的臂)。
换言之,在逆变器星形接线的各相分别设置有逆变器第一臂和逆变器第二臂。逆变器第一臂和逆变器第二臂至少包括一个单相逆变器单元,对负载侧交流系统8的第二交流电和第二直流电进行相互转换。下面示出的事例的逆变器第一臂和逆变器第二臂分别具有4个单相逆变器单元。该个数是一个例子,只要与转换器2的单相转换器单元的个数相等,则也可以是3个以下,还可以是5个以上。
例如,在u相第一臂3110设置有级联连接的单相逆变器单元3111~3114。在u相第二臂3210设置有级联连接的单相逆变器单元3215~3218。另外,省略单相逆变器单元3112、3113、3216、3217的记载。对于v相和w相也是一样的,省略标号的记载。
上述各单相逆变器单元对负载侧交流系统8的第二交流电的一部分和上述第二直流电的一部分进行相互转换。
如上所述,对于逆变器3的逆变器第一臂和逆变器第二臂,按照每个臂将单相逆变器单元串联连接而成的串联电路以星形接线方式连接。在逆变器第一臂和逆变器第二臂的各相设置有包括单相逆变器单元的串联电路。
另外,如果将逆变器第一臂和逆变器第二臂直接连接,则在逆变器3内流过短路电流。为了防止这一点,例如可以将逆变器第一臂和逆变器第二臂经由电抗器连接。在u相的情况下,经由电抗器3119和电抗器3219将u相第一臂3110和u相第二臂3210连接。对于v相和w相也是一样的。另外,上述的各电抗器具有相同大小的感抗。另外,上述的电抗器可以是在逆变器第一臂和逆变器第二臂分别设置的单相电抗器,还可以是结合电抗器。
逆变器3的单相逆变器单元与后述的DCDC转换装置组4中的一个DCDC转换装置和后述的逆变器侧电容器组6中的一个第二电容器相对应。逆变器3的直流侧与后述的DCDC转换装置组4的各DCDC转换装置的第二直流端子连接。
例如,对于逆变器3也与前述的转换器2一样地,单相逆变器单元3111~3114与电容器6111~6114连接。单相逆变器单元3215~3218与电容器6215~6218连接。另外,省略电容器6112、6113、6216、6217的记载。对于v相和w相也是一样的。其详细情况参照图4。上述的电容器6111~6114和电容器6215~6218等是第二电容器的一例。
下面,对于DCDC转换装置组4进行说明。
DCDC转换装置组4具有可以双向地传送电力的多个DCDC转换装置。例如,连接r相和u相的DCDC转换装置4111~4114、4215~4218是多个DCDC转换装置的一例。另外,在图1中省略DCDC转换装置4112、4113、4216、4217的记载。对连接s相和v相的多个DCDC转换装置及连接t相和w相的多个DCDC转换装置,也省略标号的记载。连接s相和v相的情况及连接t相和w相的情况都与上述的连接r相和u相的情况一样。将多个DCDC转换装置统一简称为DCDC转换装置4000。
例如,DCDC转换装置4000具有第一直流端子和第二直流端子。DCDC转换装置4000的第一直流端子与转换器2的单相转换器单元的直流侧连接,DCDC转换装置4000的第二直流端子与逆变器3的单相转换器单元的直流侧连接。DCDC转换装置4000将转换器2的单相转换器单元的直流侧和逆变器3的单相转换器单元的直流侧电连接。如上所述,DCDC转换装置4000是与转换器2和逆变器3连接,双向地转换电力的绝缘型的直流电力转换器。
作为第一组合的一例,DCDC转换装置4111将单相转换器单元2111的直流侧和单相逆变器单元3111的直流侧电连接。作为第二组合的一例,DCDC转换装置4114将单相转换器单元2114的直流侧和单相逆变器单元3114的直流侧电连接。
上述的DCDC转换装置4111是第一DCDC转换装置的一例。单相转换器单元2111是第一单相转换器单元的一例。单相逆变器单元3111是第一单相逆变器单元的一例。另外,DCDC转换装置4114是第二DCDC转换装置的一例。单相转换器单元2114是第二单相转换器单元的一例。单相逆变器单元3114是第二单相逆变器单元的一例。
另外,DCDC转换装置4111和DCDC转换装置4114相互绝缘,而且独立地进行控制。例如,DCDC转换装置4111和DCDC转换装置4114至少经过单相转换器单元2111而连接。在另一观点上,DCDC转换装置4111和DCDC转换装置4114至少经过单相转换器单元2111和单相转换器单元2114而连接。并且,DCDC转换装置4111和DCDC转换装置4114至少经过单相逆变器单元3111而连接。在另一观点上,DCDC转换装置4111和DCDC转换装置4114至少经过单相逆变器单元3111和单相逆变器单元3114而连接。
例如,DCDC转换装置4000具有两个单相全桥电路和单相变压器。
DCDC转换装置4000调整电力转换量,使得连接于第一单相全桥电路的单相转换器单元的直流电压和连接于第二单相全桥电路的单相逆变器单元的直流电压匹配。由此,DCDC转换装置4000对第一单相全桥电路的直流侧的电力(第一直流电)和第二单相全桥电路的直流侧的电力(第二直流电)进行相互转换,由此在转换器2和逆变器3之间相互转换电力。
另外,DCDC转换装置4000不限于上述的电路方式,还可以以其他的电路方式形成可以相互传送直流电的绝缘型的DCDC转换器。例如,两个三相电桥电路和三相变压器的组合是DCDC转换装置4000的变形例的一例。
图2A和图2B是实施方式的单相转换器单元的结构图。
图2A和图2B示出单相转换器单元2111。单相转换器单元2111例如是如图2B所示将多个半导体元件组合而成的单相全桥型。图2B示例的半导体元件是IGBT(Insulated GateBipolar Transistor,绝缘栅双极型晶体管)。半导体元件不限于IGBT,还可以是FET等其他类型。图2A所示的记载是省略了图2B所示的单相转换器单元2111进行记载的。
实施方式的单相转换器单元2111的交流侧,与共同的臂(r相第一臂2110)内的其他单相转换器单元2112、2113、2114级联连接。
在实施方式的单相转换器单元2111的直流侧设置有与其对应的电容器5111。另外,在单相转换器单元2111设置有检测电容器5111的端子电压(转换器侧电容器电压)的电压检测器VDET。由电压检测器VDET检测出的电压在控制部10的控制中使用。单相转换器单元2111以外的单相转换器单元也是同样构成的。
单相转换器单元的电路结构和单相逆变器单元的电路结构可以相同,也可以不同。另外,单相转换器单元和单相逆变器单元不限于图示的电路,只要具有可以从直流电压转换成交流电压的结构,则不限于单相全桥,还可以是其他结构。中性点钳位型、半桥型是单相转换器单元的其他结构的一例。
下面,示例转换器2的r相来说明有关电力转换的动作的概要。转换器2通过r相第一臂2110输出Vr/2的电压,通过r相第二臂2210输出-Vr/2的电压。由此,在第一交流的r相输出将上述的各电压相加得到的Vr的电压。对于s相和t相,也与r相一样。对于逆变器侧也是一样的。
参照图1和图2A和图2B,以DCDC转换装置4111为基准来整理电容器5111和电容器6111的关系。如图1所示,DCDC转换装置4111与对应于单相转换器单元2111设置的电容器5111(第一电容器)和对应于单相逆变器单元3111设置的电容器6111(第二电容器)连接。另外,DCDC转换装置4111是多个DCDC转换装置中的一个DCDC转换装置的一例。单相转换器单元2111是多个单相转换器单元中的一个单相转换器单元的一例。单相逆变器单元3111是多个单相逆变器单元中的一个单相逆变器单元的一例。例如,DCDC转换装置4111以使电容器6111的电压的瞬时值固定的方式控制直流电的转换。DCDC转换装置4000的其他部分也都是一样的。
下面,参照图3和图4对实施方式的信号名称的定义进行说明。
图3是用于说明实施方式的转换器的信号名称的定义的图。
电源侧交流系统7的三相的相电压(瞬时值)用系统电压检测值vS^r、vS^s、vS^t表示,在将它们统一的情况下,记载为vS^rst。在本文的说明中,上述的“^(hat)”表示在其后面的字符是上标字符。
与此相对,在后述的运算式中,例如按照式(1)所示记载系统电压检测值vS^rst。式(1)的左边用向量进行记载。右边划分为矩阵的成分进行记载。根据右边的变量的上标字符识别矩阵的各成分。另外,矩阵的上标字符的“T”表示转置矩阵。
数式1
同样地,三相的相电流(瞬时值)用系统电流检测值iS^r、iS^s、iS^t表示,将它们统一用系统电流检测值iS^rst(未图示)表示。关于各相的相电流,把从电源侧交流系统7朝向转换器2的方向设为正。电源侧交流系统7的交流电的基础频率用fS表示。
转换器2的各臂的电容器的电压的检测值如下所述进行规定。例如,电容器电压vCNV_DC1^r、vCNV_DC4^r是与r相第一臂相关的电容器5111、5114的电压。把与r相第一臂相关的电容器5111~5114的电压统一记载为电容器电压vCNV_DC1-4^r。电容器电压vCNV_DC5^r、vCNV_DC8^r是与r相第二臂相关的电容器5215、5218的电压。把与r相第二臂相关的电容器5215~5218的电压统一记载为电容器电压vCNV_DC5-8^r。同样地,电容器电压vCNV_DC1-4^s和vCNV_DC5-8^s是与s相第一臂相关的电容器5121~5124、和与s相第二臂相关的电容器5125~5128的电压。电容器电压vCNV_DC1-4^t和电容器电压vCNV_DC5-8^t是与t相第一臂相关的电容器5131~5134、和与t相第二臂相关的电容器5135~5138的电压。把上述的转换器2的各臂的电容器的电压称为转换器侧电容器电压。
转换器2的r相第一臂2110的电压用vCNV_P^r表示,r相第二臂2210的电压用vCNV_N^r表示。s相第一臂2120的电压用vCNV_P^s表示,s相第二臂2220的电压用vCNV_N^s表示,t相第一臂2130的电压用vCNV_P^t表示,t相第二臂2230的电压用vCNV_N^t表示,但省略图示。
r相第一臂2110的单相转换器单元产生的电压如下所述进行规定。单相转换器单元2111产生的电压用vCNV_1^r表示。r相第二臂2210的单相转换器单元2114产生的电压用vCNV_4^r表示,单相转换器单元2115产生的电压用vCNV_5^r表示,单相转换器单元2118产生的电压用vCNV_8^r表示。对于r相的其他单相转换器单元产生的电压也一样。虽省略了记载,但对于s相和t相也一样。
在r相第一臂2110流过的电流用iCNV_P^r表示,在r相第二臂2210流过的电流用iCNV_N^r表示。在s相第一臂2120流过的电流用iCNV_P^s表示,在s相第二臂2220流过的电流用iCNV_N^s表示。在t相第一臂2130流过的电流用iCNV_P^t表示,在t相第二臂2230流过的电流用iCNV_N^t表示。
另外,电流检测器210i设置于第一正侧星形接线210,检测在第一正侧星形接线210的各臂流过的电流,并输出该检测值(iCNV_P^rst)。电流检测器220i检测在第一负侧星形接线220的各臂流过的电流,并输出该检测值(iCNV_N^rst)。另外,上面的记载是检测各相的电流的情况的事例,但也可以是,例如电流检测器210i和电流检测器220i检测r相s相的电流,并根据所检测出的电流值,使用下面的式(2)和式(3)计算剩余的t相的电流值。
数式2
图4是用于说明实施方式的逆变器的信号名称的定义的图。逆变器的信号名称的定义是与前述的转换器的信号名称的定义同样地进行规定的。将rst相替换为uvw相,并且将“CNV”的记载替换为“INV”。下面,对其中一部分进行说明。
负载侧交流系统8的相电压(瞬时值)用负载电压检测值vM^uvw表示,相电流(瞬时值)用系统电流检测值iM^uvw表示。在图4中,对各相进行区分而记载。关于各相的相电流,把从负载侧交流系统8朝向逆变器3的方向设为正。负载侧交流系统8的交流电的基础频率用fM表示。
逆变器3的各臂的电容器的电压的检测值如下所述进行规定。电容器电压vINV_DC1-4^u是与u相第一臂相关的电容器6111~6114的电压。电容器电压vINV_DC5-8^u是与u相第二臂相关的电容器6215~6218的电压。把上述的逆变器3的各臂的电容器的电压称为逆变器侧电容器电压。
逆变器3的u相第一臂3110的电压用vINV_P^u表示,u相第二臂3210的电压用vINV_N^u表示。
u相第一臂3110的单相转换器单元产生的电压如下所述进行规定。单相逆变器单元3111产生的电压用vINV_1^u表示。对于vINV_4^u、vINV_5^u、vINV_8^u,也都与上述情况一样。
关于上述情况,对于v相和w相,也都与u相一样。
另外,电流检测器310i设置于第二正侧星形接线310,检测在第二正侧星形接线310的各臂流过的电流,并输出该检测值(iINV_P^uvw)。电流检测器320i设置于第二负侧星形接线320,检测在第二负侧星形接线320的各臂流过的电流,并输出该检测值(iINV_N^uvw)。另外,上面的记载是检测各相的电流的情况的事例,但也可以是,例如电流检测器310i和电流检测器320i检测任意两相的电流,根据所检测出的电流值计算剩余的相的电流值。
下面,关于实施方式的电力转换装置1的控制,举出更具体的例子进行说明。
首先,说明电力转换装置1的控制的概要。实施方式的电力转换装置1例如实施以下的控制。
·转换器侧电容器电压的稳定化
例如,转换器2进行控制使得转换器侧电容器电压的直流量一致。此时,转换器2的各单相转换器单元以使转换器侧电容器电压稳定在规定的电压的方式进行控制。
·逆变器侧电容器电压的稳定化
DCDC转换装置4000进行控制使得逆变器侧电容器电压固定,并使其瞬时值稳定。例如,DCDC转换装置4000还可以在此控制中应用已知的相移控制。
·控制负载装置M的运转状况
逆变器3接受来自上位装置的控制,利用向量控制等控制方法控制负载装置M。伴随负载装置M的运转,存在负载侧交流系统8的各相的平衡破坏,逆变器侧电容器电压产生低频脉动的情况。在上述的逆变器侧电容器电压的低频脉动中,当负载侧交流系统8的交流电的基础频率(fM)比基础频率fS低的情况下(fM ·[逆变器侧低频脉动功率降低控制] 在逆变器侧电容器电压产生了低频脉动的情况下,逆变器3进行控制使其降低。例如,逆变器3将高频的零相电压叠加在交流电压上,使在逆变器3内流过上述高频的频率的循环电流。上述的“高频的零相电压”是指将比负载侧交流系统8的交流的基础频率(fM)高的频率成分的零相电压叠加在交流电压上得到的电压。例如,交流电的基础频率(fM)的高次谐波成分(正弦波)是上述的“高的频率成分”的一例。由此,逆变器3使逆变器侧电容器电压的低频脉动降低。将此称为“逆变器侧低频脉动功率降低控制”。 ·[转换器侧低频脉动功率降低控制] 在逆变器侧电容器电压中产生的低频脉动成分传输至转换器2侧,转换器侧电容器电压产生低频脉动成分。转换器2按照逆变器侧低频脉动功率降低控制的运算结果(例如,逆变器侧的低频脉动功率估计值),在转换器2内流过交流的基波(基础频率fS)的反相循环电流,使在转换器侧电容器电压中产生的低频脉动成分降低。将此称为“转换器侧低频脉动功率降低控制”。 电力转换装置1对转换器侧低频脉动功率降低控制及逆变器侧低频脉动功率降低控制进行组合,使逆变器侧电容器电压等直流电压的低频脉动成分降低。例如,还可以预先决定转换器侧低频脉动功率降低控制和逆变器侧低频脉动功率降低控制的份额。 下面,参照图5对实施方式的控制部10的结构例进行说明。图5是实施方式的控制部10的结构图。 控制部10具有转换器控制部12(第一控制部)和逆变器控制部13(第二控制部)。 首先,对转换器控制部12进行说明。 转换器控制部12具有平均电压运算单元1201、第一αβ0转换器1202、第一PN-YZ转换器1203、臂平衡控制部1204、加法器1206、PLL电路1207(图中的记载是“PLL(Phase-Locked Loop)”)、第一dq0转换器1209、第二dq0转换器1210、第二PN-YZ转换器1211、系统电流ACR(Automatic Current Regulator,自动电流调节器)1212、第一循环电流控制部1213、第一YZ-PN转换器1214、第一dq0反转换器1215、CNV控制器1216、第一低频脉动功率降低控制部1217(图中的记载是“第一LF_RPP控制部”)。平均电压运算单元1201、第一αβ0转换器1202和第一PN-YZ转换器1203形成转换器充电状态检测单元1205。 转换器充电状态检测单元1205例如对于转换器2的各臂的电容器共同地,基于施加给各电容器的直流电压的指令值(电容器电压指令值vDC^*)和转换器侧电容器电压的检测值,检测转换器侧电容器电压的平衡。下面,说明转换器充电状态检测单元1205的一例。 平均电压运算单元1201具有6个偏差量运算单元12011。偏差量运算单元12011基于转换器2的各臂的电容器电压指令值vDC^*和转换器2的各臂的电容器的电压的检测值,对每个臂计算各臂的电容器的电压的偏差量。 参照图6说明上述的各臂的电容器的电压的偏差量的计算。图6是实施方式的偏差量运算单元12011的结构图。偏差量运算单元12011具有LPF运算单元12011a、12011b、减法器12011c、12011d、和平均运算单元12011e。 下面,作为检测对象的转换器侧电容器电压示例说明电容器电压vCNV_DC1-4^r。对于其他的情况也一样。 例如,LPF运算单元12011a是低通滤波器(称为“LPF”),提取电容器电压vCNV_DC1^r的低频成分。LPF运算单元12011b是LPF,同样地提取电容器电压vCNV_DC4^r的低频成分。例如,对于LPF运算单元12011a和LPF运算单元12011b的LPF特性,以截断交流的基波成分(fS)的方式决定LPF的截断频率。同样地,通过未图示的LPF运算单元,同样地提取电容器电压vCNV_DC2-3^r的低频成分。 减法器12011c从电容器电压vCNV_DC1^r的低频成分减去电容器电压指令值vDC^*,并输出作为该结果的电压偏差ΔvCNV_DC1^r。减法器12011d从电容器电压vCNV_DC4^r的低频成分减去电容器电压指令值vDC^*,并输出作为该结果的电压偏差ΔvCNV_DC4^r。通过未图示的减法器,同样地计算电压偏差ΔvCNV_DC2-3^r。 平均运算单元12011e(图中的记载是“AVE”)计算电压偏差ΔvCNV_DC1-4^r的平均值(电容器电压偏差量ΔvCNV_DCP^r)。 返回到图5,对转换器2的各臂的电容器的电压的偏差量进行整理。 电容器电压偏差量ΔvCNV_DCP^r是指r相第一臂的电容器5111~5114的电容器电压vCNV_DC1-4^r相对于上述电容器电压指令值vDC^*的偏差量的平均值。电容器电压偏差量ΔvCNV_DCN^r是指r相第二臂的电容器5115~5118的电容器电压vCNV_DC5-8^r相对于上述电容器电压指令值vDC^*的偏差量的平均值。电容器电压偏差量ΔvCNV_DCP^s是指s相第一臂的电容器5121~5124的电压相对于上述电容器电压指令值vDC^*的偏差量的平均值。电容器电压偏差量ΔvCNV_DCN^s是指s相第二臂的电容器5125~5128的电压相对于上述电容器电压指令值vDC^*的偏差量的平均值。电容器电压偏差量ΔvCNV_DCP^t是指t相第一臂的电容器5131~5134的电压相对于上述电容器电压指令值vDC^*的偏差量的平均值。电容器电压偏差量ΔvCNV_DCN^t是指t相第二臂的电容器5135~5138的电压相对于上述电容器电压指令值vDC^*的偏差量的平均值。如上所述,平均电压运算单元1201输出的值是各偏差量的平均值,在下面的说明中,将分别输出的值简称为“电容器电压偏差量”。 如上所述,平均电压运算单元1201将各相的电容器电压偏差量作为固定坐标系的三相信号(ΔvCNV_DCP^rst和ΔvCNV_DCN^rst)输出。 第一αβ0转换器1202将固定坐标系的三相信号转换成固定坐标系的二相信号。将其称作“αβ0转换”。第一αβ0转换器1202对转换器2的第一臂和第二臂进行区分而实施“αβ0转换”。例如,第一αβ0转换器1202根据电容器电压偏差量ΔvCNV_DCP^rst,使用式(4)计算转换器2的第一臂的电容器电压偏差量ΔvCNV_DCP^αβ0。第一αβ0转换器1202根据电容器电压偏差量ΔvCNV_DCN^rst,使用式(5)计算转换器2的第二臂的电容器电压偏差量ΔvCNV_DCN^αβ0。式(6)示出了上述的式中的“αβ0转换”所使用的矩阵“C^αβ0”。 数式3
第一PN-YZ转换器1203基于通过第一αβ0转换器1202转换了坐标的固定坐标系的二相信号,对该变量进行转换。将该转换处理称作“PN-YZ转换”。例如,第一PN-YZ转换器1203根据电容器电压偏差量ΔvCNV_DCP^αβ0和电容器电压偏差量ΔvCNV_DCN^αβ0,使用下面的式(7)对该变量进行转换,计算电容器电压偏差量ΔvCNV_DCY^αβ0和电容器电压偏差量ΔvCNV_DCZ^αβ0,将臂之间的直流电压不平衡量分离。 数式4
下面,对臂平衡控制部1204进行说明。 臂平衡控制部1204根据第一PN-YZ转换器1203的运算结果,生成使各臂的电压彼此相等的电流指令值。 例如,臂平衡控制部1204根据电容器电压偏差量ΔvCNV_DCY^αβ0和电容器电压偏差量ΔvCNV_DCZ^αβ,生成用于调整循环电流的电流指令值iCNV_ZB^d*和电流指令值iCNV_ZB^q*。臂平衡控制部1204将生成的电流指令值iCNV_ZB^d*供给至后述的d轴加法器1206d,将电流指令值iCNV_ZB^q*供给至后述的q轴加法器1206q。关于臂平衡控制部1204的详细情况在后面进行说明。 下面,对第一低频脉动功率降低控制部1217进行说明。 第一低频脉动功率降低控制部1217根据由逆变器控制部13供给的αβ0坐标系的低频脉动成分~pM^α*和~pM^β*,计算电流指令值iCNV_ZLF^d*和电流指令值iCNV_ZLF^q*。逆变器控制部13至少包括LF_PPS控制器1322和第二αβ0转换器1323。关于第一低频脉动功率降低控制部1217和逆变器控制部13的详细情况在后面进行说明。 加法器1206将臂平衡控制部1204的运算结果和后述的第一低频脉动功率降低控制部1217的运算结果相加。例如,加法器1206具有d轴加法器1206d和q轴加法器1206q。d轴加法器1206d将第一输入信号的电流指令值iCNV_ZB^d*和后述的第二输入信号的电流指令值iCNV_ZLF^d*相加,并输出电流指令值iCNV_Z^d*。q轴加法器1206q将第一输入信号的电流指令值iCNV_ZB^q*和后述的第二输入信号的电流指令值iCNV_ZLF^q*相加,并输出电流指令值iCNV_Z^q*。 下面,对PLL电路1207进行说明。 PLL电路1207例如具有未图示的r相PLL电路、s相PLL电路和t相PLL电路。PLL电路1207的r相PLL电路例如基于A-B线间电压提取电源侧交流系统7的电压的基波成分等,并生成相位θCNV^r。相位θCNV^r与电源侧交流系统7的r相的电压的基波的相位同步。同样地,PLL电路1207的s相PLL电路基于B-C线间电压生成相位θCNV^s。PLL电路1207的s相PLL电路基于C-A线间电压生成相位θCNV^t。相位θCNV^r、相位θCNV^s和相位θCNV^t相互具有(2π/3)弧度的相位差。相位θCNV^rst与电源角频率(电气角速度)ω的积分值等价,在说明中有时用电源角频率ω和时刻信息(t)之积表示。 另外,PLL电路1207还可以是三相PLL。在这种情况下,PLL电路1207基于电源侧交流系统7的系统电压检测值vs^rst提取系统电压的基波成分,并生成与基波成分同步的相位θCNV^rst。 PLL电路1207将相位θCNV^rst的代表值供给至后述的第一dq0转换器1209、第二dq0转换器1210、系统电流ACR1212和第一dq0反转换器1215。 第一dq0转换器1209实施相对于固定坐标系的三相信号的αβ0转换,并使用式(9)所示的矩阵实施“αβ0-dq0转换”,由此从固定坐标系的二相信号转换成以dq0轴为基准的旋转坐标系的二相信号。将利用了基准角度信号θCNV^rst的上述两阶段的转换统一称为“三相-dq0转换”。通过电压检测器(未图示)检测出的电源侧交流系统7的系统电压检测值vS^rst是固定坐标系的三相信号的一例。系统电压检测值vS^dq是旋转坐标系的二相信号的一例。第一dq0转换器1209按照下面的式(8)实施系统电压检测值vS^rst的三相-dq0转换,计算该结果系统电压检测值vS^dq0。另外,由于系统电压检测值vS^0的值是0,所以还可以省略与系统电压检测值vS^0相关的后段的处理。 数式5
第二dq0转换器1210同样地如式(10)和式(11)所示,通过针对作为转换器2的各臂电流的检测值的第一臂的rst相电流值iCNV_P^rst和第二臂的rst相电流值iCNV_N^rst的三相-dq0转换,将它们分别转换成第一臂的rst相电流值iCNV_P^dq0和第二臂的rst相电流值iCNV_N^dq0。另外,第一臂的rst相电流值iCNV_P^0和第二臂的rst相电流值iCNV_N^0的成分在后段的处理中不使用,所以可以省略其计算。 数式6
第二PN-YZ转换器1211通过前述的“PN-YZ转换”,使用式(12),基于第一臂的rst相电流值iCNV_P^dq和第二臂的rst相电流值iCNV_N^dq,转换成rst相系统侧电流值iCNV_Y^dq和rst相循环电流值iCNV_Z^dq。 数式7
在上述的式(12)中,rst相系统侧电流值iCNV_Y表示系统侧电流,rst相循环电流值iCNV_Z表示在转换器2内循环的循环电流。 系统电流ACR1212例如基于rst相系统侧电流值iCNV_Y^dq、逆变器侧有功功率指令值pM^*、转换器侧无功功率指令值qS^*、电容器电压偏差量ΔvCNV_DCZ^0、系统电压检测值vS^dq和相位θCNV^rst,计算rst相电压指令值vCNV_Y^dq*。例如,逆变器侧有功功率指令值pM^*和转换器侧无功功率指令值qS^*是来自上位装置的指令值。关于系统电流ACR1212的详细情况在后面进行说明。 第一循环电流控制部1213(下面称为“第一循环电流ACR1213”)基于电流指令值iCNV_Z^d*、电流指令值iCNV_Z^q*和rst相循环电流值iCNV_Z^dq,生成rst相电压指令值vCNV_Z^dq*。关于第一循环电流ACR1213的详细情况在后面进行说明。 第一YZ-PN转换器1214实施前述的“PN-YZ转换”(参照式(7))的逆转换。将其称作“YZ-PN转换”。第一YZ-PN转换器1214通过YZ-PN转换,将rst相电压指令值vCNV_Y^dq*和rst相电压指令值vCNV_Z^dq*转换成第一臂的rst相电压指令值vCNV_P^dq*和第二臂的rst相电压指令值vCNV_N^dq*。 第一dq0反转换器1215实施前述的dq0转换(参照式(9))的逆转换。将其称作“dq0逆转换”。第一dq0反转换器1215通过dq0逆转换,基于第一臂的rst相电压指令值vCNV_P^dq*及其零相成分的rst相电压指令值vCNV_P^0,生成第一臂的rst相电压指令值vCNV_P^rst*。第一dq0反转换器1215通过dq0逆转换,基于第二臂的rst相电压指令值vCNV_N^dq*及其零相成分的rst相电压指令值vCNV_N^0,生成第二臂的rst相电压指令值vCNV_N^rst*。另外,上述的rst相电压指令值vCNV_P^0和rst相电压指令值vCNV_N^0的值,为了简单起见可以设为0,为了利用过调制区域还可以设为基波的3n次的零相成分。上述的“3n次”表示3的自然数倍的次数。 CNV控制器1216基于第一臂的rst相电压指令值vCNV_P^rst*和第二臂的rst相电压指令值vCNV_N^rst*,生成用于控制转换器2内的各单相转换器单元的选通脉冲(gatepulse)GPCNV。例如,关于转换器2内的单相转换器单元的个数,由于对于三相交流的每个相设置有各两个臂,对各个臂设置有4个单相转换器单元,所以总共是24个。如果单相转换器单元是全桥型,则各单相转换器单元具有4个开关元件,所以选通脉冲的信号数量是总共96个。 下面,对实施方式的转换器控制部12的控制进行详细说明。 转换器控制部12利用上述的结构实施以下的控制。 ·使所有的转换器侧电容器电压的直流量固定的控制 ·转换器侧低频脉动功率降低控制 下面,依次说明转换器控制部12的上述两个控制。 第一个“使所有的转换器侧电容器电压的直流量固定的控制”,可以阶段化为以下所示的多个控制(子控制),通过这多个控制的组合来实现。 ·直流电压总括控制: CNV控制器1216通过调整从电源侧交流系统7输入的有功功率,以使所有的转换器侧电容器电压的算术平均值成为期望的值的方式进行控制。 ·臂平衡控制: CNV控制器1216通过对在转换器2(converter)内流过的循环电流进行控制,使得各臂的转换器侧直流电容器电压的平均值均等。将其称作“电容器电压平衡控制”,其详细情况在后面进行说明。 ·个别平衡控制: CNV控制器1216在使各臂内的转换器侧直流电容器电压平衡时,还可以进行个别平衡控制。 另外,该个别平衡控制是不干扰臂输出电压的调整的控制。CNV控制器1216能够在不对上述的“直流电压总括控制”及“臂平衡控制”产生影响的情况下独立进行控制。例如,可以是,在r相第一臂输出额定电压的100%的电压的情况下,均等地(例如,25%:25%:25%:25%)分配臂内的4个单相转换器单元分别输出的电压(单元输出电压)的比率。不限于此,还可以与直流电压对应地不均等地微调单元输出电压的比率而进行分配。这样用于个别地调整对臂内的各单相转换器单元分配的值的控制是“个别平衡控制”。例如,通过上述的调整,能够不均等地(例如,20%:30%:25%:25%)分配单元输出电压的比率。此时,设定成合计值为100%。另外,为了简化说明,在下面的说明中省略个别平衡控制的说明,对使单相转换器单元分别输出的电压的比率均等的情况进行说明。 下面,对上述的“电容器电压平衡控制”进行说明。 电容器电压平衡控制例如可以为了使电容器电压的直流成分稳定,将电容器电压的不平衡成分分离出来进行调整使其成为0。 例如,转换器充电状态检测单元1205的平均电压运算单元1201对转换器侧电容器电压的检测值首先实施LPF运算,使由交流的基础频率(fs)导致的脉动成分降低,然后计算与各电容器电压指令值vDC^*的偏差。并且,平均电压运算单元1201对上述的偏差量计算臂内的算术平均。其中一例如在前面说明的那样。 转换器充电状态检测单元1205对于平均电压运算单元1201的运算结果,由第一αβ0转换器1202实施αβ0转换,并由第一PN-YZ转换器1203实施“PN-YZ转换”。由此,转换器充电状态检测单元1205计算电容器电压偏差量ΔvCNV_DCY^αβ0和电容器电压偏差量ΔvCNV_DCZ^αβ0。转换器充电状态检测单元1205将电容器电压偏差量ΔvCNV_DCY^αβ0和电容器电压偏差量ΔvCNV_DCZ^αβ供给至臂平衡控制1204。它们表示臂之间的直流电压不平衡量。转换器充电状态检测单元1205将电容器电压偏差量ΔvCNV_DCZ^0供给至系统电流ACR1212。电容器电压偏差量ΔvCNV_DCZ^0表示所有电容器电压的平均与电容器电压指令值vDC^*之差(偏差量)。 臂平衡控制部1204使用第一PN-YZ转换器1203的运算结果计算循环电流的指令值。 另外,转换器控制部12根据流过臂的电流的检测值实施反馈控制。例如,针对流过臂的电流的检测值,由第二αβ0转换器1210实施αβ0转换,由第二PN-YZ转换器1211实施“PN-YZ转换”。作为第二PN-YZ转换器1211的运算结果的rst相系统侧电流值iCNV_Y^dq表示电源侧交流系统7侧的电流的大小。rst相系统侧电流值iCNV_Z^dq表示在转换器2内流过的循环电流。 系统电流ACR1212为了从电源给予、接受该过量或不足量的功率,基于电容器电压偏差量ΔvCNV_DCZ^0调整系统电流iCNV_Y(将此称作“直流电压总括控制”)。 下面,对与实施方式的“直流电压总括控制”相关的系统电流ACR1212进行说明。图7是实施方式的系统电流ACR1212的结构图。系统电流ACR1212具有运算单元1212a~1212l。另外,VS表示电源侧交流系统7的线间电压有效值。vS^dq表示与系统电压检测值vS^rst对应的系统电压检测值。在后述的事例中,将系统电压检测值vS^dq用于前馈项。 运算单元1212a对转换器侧无功功率指令值qS^*乘以基于电源侧交流系统7的线间电压有效值的规定的系数“1/VS”,计算无效电流输出指令值iCNV_Y^q*。运算单元1212b从无效电流输出指令值iCNV_Y^q*减去rst相系统侧电流值iCNV_Y^q。运算单元1212c基于rst相系统侧电流值iCNV_Y^q相对于无效电流输出指令值iCNV_Y^q*的偏差量,计算使该偏差成为零的第一q轴系统电压指令值vCNV_Y1^q*。例如,可以是,运算单元1212c实施基于运算式“KS+KS/sTS”的比例积分运算,计算第一q轴系统电压指令值vCNV_Y1^q*。上述的“KS”例如是预先设定的比例增益。上述的“KS/TS”例如是预先设定的积分增益。上述的“TS”是规定的运算周期,运算式的分母中的“s”是拉普拉斯运算符。另外,比例增益和积分增益的“KS”可以是不同的值。 运算单元1212d对逆变器侧有功功率指令值pM^*乘以与上述一样的规定的系数“1/VS”,计算无效电流输出指令值iCNV_Y^d*。运算单元1212e对电容器电压偏差量ΔvCNV_DCZ^0乘以规定的系数“K0A”。上述的“K0A”例如是预先设定的常数。运算单元1212f将运算单元1212d和运算单元1212e的运算结果相加,计算无效电流输出指令值iCNV_Y^d*。运算单元1212g从无效电流输出指令值iCNV_Y^d*减去rst相系统侧电流值iCNV_Y^d。运算单元1212h基于rst相系统侧电流值iCNV_Y^d相对于无效电流输出指令值iCNV_Y^d*的偏差量,计算使该偏差成为零的第一d轴系统电压指令值vCNV_Y1^d*。 运算单元1212i对无效电流输出指令值iCNV_Y^d*乘以规定的系数“ωLB”,计算第二q轴系统电压指令值vCNV_Y2^q*。上述的“LB”例如是电抗器3119的电抗值。运算单元1212j对无效电流输出指令值iCNV_Y^q*乘以规定的系数“ωLB”,计算第二d轴系统电压指令值vCNV_Y2^d*。上述的“LB”例如是电抗器3219的电抗值,该值可以是与电抗器3119的电抗值相同的值。 运算单元1212k将第二d轴系统电压指令值vCNV_Y2^d*和系统电压检测值vS^d相加,进而从其和减去第一d轴系统电压指令值vCNV_Y1^d*,计算该结果rst相电压指令值vCNV_Y^d*。运算单元1212l从系统电压检测值vS^q减去第一q轴系统电压指令值vCNV_Y1^q*和第二q轴系统电压指令值vCNV_Y2^q*,计算该结果rst相电压指令值vCNV_Y^q*。 系统电流ACR1212通过上述的“系统电压总括控制”,与电源侧交流系统7给与、接收所有电容器电压的过量和不足量的功率,由此使电容器电压的直流成分稳定。 下面,对与实施方式的“臂平衡控制”相关的臂平衡控制部1204进行说明。 图8是实施方式的臂平衡控制部1204的结构图。臂平衡控制部1204具有运算单元1204a~1204h。 运算单元1204a对电容器电压偏差量ΔvCNV_DCY^0乘以规定的系数“KCNV_DCY^0”,计算第一电流指令值iCNV_ZB^f*。 运算单元1204b计算电容器电压偏差量ΔvCNV_DCY^αβ的大小(绝对值|ΔvCNV_DCY^αβ|)。运算单元1204c对绝对值|ΔvCNV_DCY^αβ|乘以规定的系数“KCNV_DCY^αβ”,计算第二电流指令值iCNV_ZB^b*。运算单元1204d使用下面的式(13)计算基于电容器电压偏差量ΔvCNV_DCY^αβ的偏角 数式8
运算单元1204e计算电容器电压偏差量ΔvCNV_DCZ^αβ的大小(绝对值|ΔvCNV_DCZ^αβ|)。运算单元1204f对绝对值|ΔvCNV_DCZ^αβ|乘以规定的系数“KCNV_DCZ^αβ”,计算第二电流指令值iCNV_Zdc^b*。运算单元1204g使用下面的式(14)计算基于电容器电压偏差量ΔvCNV_DCZ^αβ的偏角 数式9
运算单元1204h根据上述的第一电流指令值iCNV_ZB^f*、第二电流指令值iCNV_ZB^b*、偏角 数式10
上述的式(15)的第一项~第三项与系统频率的正相/反相及直流的循环电流的大小对应。通过调整这些项的值能够进行控制,使得流过期望的循环电流。 下面,依次说明与实施方式的循环电流控制相关的第一低频脉动功率降低控制部1217和第一循环电流ACR1213。 图9是实施方式的第一低频脉动功率降低控制部1217的结构图。第一低频脉动功率降低控制部1217具有运算单元1217a~1217d。 运算单元1217a计算低频脉动成分~pM^αβ*的大小(绝对值|~pM^αβ*|)。运算单元1217b对绝对值|~pM^αβ*|乘以换算增益“GCNV_LF^αβ”,计算电流指令值iCNV_ZLF^b*。换算增益“GCNV_LF^αβ”是用于将功率转换成电流的转换系数(转换率)的一例。运算单元1217c使用下面的式(16)计算基于低频脉动成分~pM^αβ*的偏角 数式11
运算单元1217d基于上述的电流指令值iCNV_ZLF^b*和偏角 数式12
上述的式(17)相当于从前述的式(15)中提取臂平衡控制的反相电流成分。但是,与绝对值|~pM^αβ*|相乘的换算增益“GCNV_LF”,和臂平衡控制部1204的运算单元1204a使用的常数(规定的系数“KCNV_DCY^0”)不同。臂平衡控制中的上述的常数作为控制增益进行规定。与此相对,换算增益“GCNV_LF”作为用于根据输入的脉动功率计算需要何种程度的电流的增益进行规定。 例如,通常可以将换算增益“GCNV_LF”设定为将脉动功率全部抵消的值。在转换器2的电流容量没有富余,不能供给将脉动功率全部抵消的循环电力的情况下、或并用后述的“INV侧低频脉动控制”的情况下等,可以适当降低换算增益“GCNV_LF”,还可以根据转换器2的动作状态进行降低。 然后,加法器1206将上述的臂平衡控制的结果电流指令值iCNV_ZB^dq*、和CNV侧低频脉动降低控制的结果电流指令值iCNV_ZLF^dq*相加,作为最终的循环电流指令值(电流指令值iCNV_Z^dq*)。 图10是实施方式的第一循环电流ACR1213的结构图。第一循环电流ACR1213具有运算单元1213b、1213c、1213g~1213l。 运算单元1213b从电流指令值iCNV_Z^q*减去rst相系统侧电流值iCNV_Z^q。运算单元1213c根据rst相系统侧电流值iCNV_Z^q相对于电流指令值iCNV_Z^q*的偏差量,计算使该偏差成为零的第一q轴系统电压指令值vCNV_Z1^q*。例如,可以是,运算单元1213c实施以“KCNV_Z^dq”规定系数的比例运算,计算第一q轴系统电压指令值vCNV_Z1^q*。 运算单元1213g从电流指令值iCNV_Z^d*减去rst相系统侧电流值iCNV_Z^d。运算单元1213h根据rst相系统侧电流值iCNV_Z^d相对于电流指令值iCNV_Z^d*的偏差量,计算使该偏差成为零的第一d轴系统电压指令值vCNV_Z1^d*。 运算单元1213i对电流指令值iCNV_Z^d*乘以规定的系数“ωLB”,计算第二q轴系统电压指令值vCNV_Z2^q*。运算单元1213j对电流指令值iCNV_Z^q*乘以规定的系数“ωLB”,计算第二d轴系统电压指令值vCNV_Z2^d*。 运算单元1213k从第二d轴系统电压指令值vCNV_Z2^d*减去第一d轴系统电压指令值vCNV_Z1^d*,计算该结果rst相电压指令值vCNV_Z^d*。运算单元1213l从第二q轴系统电压指令值vCNV_Z2^q*减去第一q轴系统电压指令值vCNV_Z1^q*,计算该结果rst相电压指令值vCNV_Z^q*。 通过第一循环电流ACR1213计算出的rst相电压指令值vCNV_Z^q*,经由后段的第一dq0反转换器1215和CNV控制器1216转换成选通脉冲GPCNV^rst,转换器2的各臂由该选通脉冲GPCNV^rst控制。 通过上述的控制,转换器控制部12能够在转换器2的内部流过期望的循环电流。 例如,转换器控制部12还可以控制转换器2,使得作为在第一正侧星形接线210和第一负侧星形接线220流过的第一循环电流,流过与有关电源侧交流系统7的交流电的基波正相电流相对的基波反相电流。 转换器控制部12可以控制转换器2使得电源侧交流系统7的各相的有功功率一致。 下面,对实施方式的逆变器控制部13进行说明。 图11是实施方式的逆变器控制部13的结构图。 逆变器控制部13具有第三dq0转换器1310、第三PN-YZ转换器1311、电机电流ACR1312、第二循环电流控制部1313、第二YZ-PN转换器1314、第二dq0反转换器1315、INV控制器1316、INV电流指令值相位运算单元1321、LF_PPS控制器1322、第二αβ0转换器1323、第二低频脉动功率降低控制部1324(图中的记载是“第二LF_RPP控制部”)、零相电压运算单元1325、和乘法器1326。 第三dq0转换器1310通过以坐标转换用相位θINV为基准的三相-dq0转换,将作为逆变器3的各臂电流的检测值的第一臂的uvw相电流值iINV_P^uvw和第二臂的uvw相电流值iINV_N^uvw转换成第一臂的uvw相电流值iINV_P^dq和第二臂的uvw相电流值iINV_N^dq。 第三PN-YZ转换器1311实施PN-YZ转换。第三PN-YZ转换器1311基于第一臂的uvw相电流值iINV_P^dq和第二臂的uvw相电流值iINV_N^dq,转换成uvw相系统侧电流值iINV_Y^dq和uvw相循环电流值iINV_Z^dq。uvw相系统侧电流值iINV_Y表示系统侧电流,uvw相循环电流值iINV_Z表示在转换器2内循环的循环电流。 电机电流控制部1312(下面称为“电机ACR1312”)根据uvw相系统侧电流值iINV_Y^dq和电机电流指令值iINV_Y^dq*,计算uvw相电压指令值vINV_Y^dq*。 电机电流ACR1312例如具有运算单元1312b、1312c、1312g~1312l。运算单元1312b、1312c、1312g~1312l与前述的系统电流ACR1213的1212b、1212c、1212g~1212l对应。关于电机电流ACR1313的详细说明,可以按照上述的对应关系参照图7及其说明。 第二循环电流控制部1313(下面称为“第二循环电流ACR1313”)基于电流指令值iINV_ZLF^dq*和uvw相循环电流值iINV_Z^dq,生成uvw相电压指令值vINV_Z^dq*。 第二循环电流ACR1313具有运算单元1313b、1313c、1313g~1313l。运算单元1313b、1313c、1313g~1313l与第一循环电流ACR1213的1213b、1213c、1213g~1213l对应。关于第二循环电流ACR1313的详细说明,可以按照上述的对应关系参照图10及其说明。 第二YZ-PN转换器1314实施YZ-PN转换,将uvw相电压指令值vINV_Y^dq*和uvw相电压指令值vINV_Z^dq*转换成第一臂的uvw相电压指令值vINV_P^dq*和第二臂的uvw相电压指令值vINV_N^dq*。 零相电压运算单元1325为了上述的“逆变器侧低频脉动功率降低控制”,以将“高频的零相电压”叠加至交流电压的方式生成指定逆变器3输出的零相电压的uvw相电压指令值vINV_LF^0*。另外,零相电压运算单元1325可以在调整逆变器3的零相电压的大小(振幅)及相位时,以使逆变器3的输出电压不饱和的方式设定它们的值。 乘法器1326基于uvw相电压指令值vINV_LF^0*,计算绝对值与uvw相电压指令值vINV_LF^0*相等的、负的值的uvw相电压指令值vINV_LFN^0。 第二dq0反转换器1315基于第一臂的uvw相电压指令值vINV_P^dq*及其零相成分的uvw相电压指令值vINV_LF^0*,实施以坐标转换用相位θINV为基准的dq0逆转换,生成第一臂的uvw相电压指令值vINV_P^uvw*。第二dq0反转换器1315基于第二臂的uvw相电压指令值vINV_N^dq*及其零相成分的uvw相电压指令值vINV_LFN^0*,同样地实施dq0逆转换,生成第二臂的uvw相电压指令值vINV_N^uvw*。 INV控制器1316基于第一臂的uvw相电压指令值vINV_P^uvw*和第二臂的uvw相电压指令值vINV_N^uvw*,生成用于控制逆变器3内的各单相逆变器单元的选通脉冲GPINV。例如,逆变器3内的单相逆变器单元的个数与转换器2一样,总共是24个。如果单相逆变器单元是全桥型,则选通脉冲的信号数量与转换器2一样是总共96个。 关于INV电流指令值相位运算单元1321、LF_PPS控制器1322、第二αβ0转换器1323和第二低频脉动功率降低控制部1324,在控制的说明中汇总说明。 下面,对实施方式的逆变器控制部13的控制进行说明。 INV电流指令值相位运算单元1321基于速度FBK计算dq轴的电机电流指令值iINV_Y^dq*和坐标转换用相位(θINV)。例如,INV电流指令值相位运算单元1321可以基于从上位控制器指定的速度基准和通过速度检测器SS(图1)检测出的电机M的角速度(称作速度FBK),利用向量控制等已知的技术,计算dq轴的电机电流指令值iINV_Y^dq*。并且,INV电流指令值相位运算单元1321例如对速度FBK进行积分来计算坐标转换用相位θINV。 另外,图11所示的结构以具有电流局部磁滞回线的闭环控制为前提,但也可以应用开环控制。向量控制是闭环控制的一例,V/f控制(电压频率比固定控制)是开环控制的一例。另外,在上述的结构中示例了使用速度检测器的速度控制系统,但也可以应用不使用速度检测器的无传感器控制(无传感器向量控制),还可以不是速度控制,而替换为转矩控制。 电机ACR1312基于uvw相系统侧电流值iINV_Y^dq和电机电流指令值iINV_Y^dq*,计算uvw相电压指令值vINV_Y^dq*。第二循环电流ACR1313基于电流指令值iINV_ZLF^dq*和uvw相循环电流值iINV_Z^dq,生成uvw相电压指令值vINV_Z^dq*。电机ACR1312和第二循环电流ACR1313以各自的成分实施电流控制。上述的Y成分表示电机的驱动电流,电机ACR1312以追随上述得到的电机电流指令值的方式实施电流控制。 下面,参照图12对LF_PPS控制器1322进行说明。 图12是实施方式的LF_PPS控制器1322的结构图。LF_PPS控制器1322基于电机电流指令值iINV_Y^dq*和uvw相电压指令值vINV_Y^dq*,计算供给至电机M的功率pM所包含的低频脉动成分(~pM^uvw*)。 例如,LF_PPS控制器1322具有第三dq0逆转换器1322a、第四dq0逆转换器1322b、运算单元1322c~1322j。 第三dq0逆转换器1322a实施以坐标转换用相位θINV为基准的dq0逆转换,根据dq轴的uvw相电压指令值的Y成分vINV_Y^dq*及其零相成分的uvw相电压指令值的Y成分vINV_Y^0,生成uvw相电压指令值的Y成分vINV_Y^uvw*。另外,uvw相电压指令值vINV_Y^0的值是0。 第四dq0逆转换器1322b实施以坐标转换用相位θINV为基准的dq0逆转换,根据dq轴的uvw相电流指令值的Y成分iINV_Y^dq*及其零相成分的uvw相电流指令值的Y成分iINV_Y^0,生成uvw相电流指令值的Y成分iINV_Y^uvw*。另外,uvw相电流指令值iINV_Y^0的值是0。 运算单元1322c、1322d、1322e是乘法器。运算单元1322c、1322d、1322e将uvw相电压指令值的Y成分vINV_Y^uvw*和uvw相电流指令值的Y成分iINV_Y^uvw*按照每个成分进行相乘,计算uvw相的瞬时功率指令值pM^uvw*。 运算单元1322f是加法器,将uvw相的瞬时功率指令值pM^uvw*的各成分相加。uvw相的瞬时功率指令值pM^uvw*的合计值成为有功功率指令值pM^*。运算单元1322g将有功功率指令值pM^*除以3,为各相分配该商,设为后段的基准值。 运算单元1322h、1322i、1322j是减法器,从uvw相的瞬时功率指令值pM^uvw*的各成分减去为各相分配的基准值(有功功率指令值pM^*/3)。运算单元1322h、1322i、1322j的运算结果成为各相所包含的低频脉动成分(~pM^uvw*)。由此,LF_PPS控制器1322能够将uvw相的低频脉动成分按照每个相进行分离。 下面,返回到图10,对在LF_PPS控制器1322的后段设置的第二αβ0转换器1323进行说明。 第二αβ0转换器1323通过αβ0转换,将uvw相的低频脉动成分(~pM^uvw*)转换成固定坐标系的低频脉动成分(~pM^αβ0*)。第二αβ0转换器1323将低频脉动成分(~pM^αβ*)输出给后述的第二低频脉动功率降低控制部1324和前述的第一低频脉动功率降低控制部1217。另外,第二αβ0转换器1323可以不输出零相成分。 另外,逆变器3输出的第二交流电的基础频率fM和相位,与供给至转换器2的第一交流电的基础频率fS和相位相互不同。如上所述,第二αβ0转换器1323通过αβ0转换,用固定坐标系表示低频脉动成分。由此,转换器2和逆变器3能够将上述的低频脉动成分的值作为固定坐标系的信息共有。转换器2和逆变器3基于固定坐标系的低频脉动成分的值分别进行控制,由此可以实现相互协作的控制。 下面,参照前述的图11,对第二低频脉动功率降低控制部1324使用低频脉动成分(~pM^αβ*)控制逆变器3内的循环电流的情况进行说明。 图11所示的第二低频脉动功率降低控制部1324的结构与图7所示的第一低频脉动功率降低控制部1217不同。 第二低频脉动功率降低控制部1324基于低频脉动成分(~pM^αβ*)生成电流指令值iINV_ZLF^αβ*。 例如,第二低频脉动功率降低控制部1324使用下面的式(18),对上述的低频脉动成分~pM^αβ*乘以与转换器2侧一样的换算增益“GINV_LF^αβ”,计算电流指令值IINV_ZLF^αβ*。换算增益“GINV_LF^αβ”是将功率转换为电流用的转换系数(转换率)的一例。 数式13
如在CNV侧所说明的那样,控制部10按照电力转换装置1的运转状态,将换算增益“GCNV_LF^αβ”和换算增益“GINV_LF^αβ”的比率预先或者适合地设定为适当的值,由此能够优化降低低频脉动功率的效果。还可以据此设定上述的比率。 第二低频脉动功率降低控制部1324对上述求出的循环电流的电流指令值IINV_ZLF^αβ*实施αβ0逆转换,生成uvw相的电流指令值IINV_ZLF^uvw*。此时,设零相的值为0。 然后,第二低频脉动功率降低控制部1324使用下面的式(19),基于电流指令值IINV_ZLF^uvw*计算电流指令值iINV_ZLF^uvw*。 数式14
然后,第二低频脉动功率降低控制部1324对电流指令值iINV_ZLF^uvw*实施dq转换,计算电流指令值iINV_ZLF^dq*。 第二循环电流ACR1313通过与前述的第一循环电流ACR1213一样的方法,基于通过第二低频脉动功率降低控制部1324计算出的电流指令值iINV_ZLF^dq*,生成uvw相电压指令值vINV_Z^dq*。 此后通过第二dq0逆转换器1315和INV控制器1316进行的处理如前面说明的那样进行。 另外,零相电压运算单元1325可以使用下面的式(20)生成uvw相电压指令值vINV_LF^0*。 数式15
在此,对于比基础频率fM高的频率成分(下面称为fX)进行规定。上述的式(20)中的“X”是用于上述的频率成分fX的识别的识别符。“VX^0*”以实效值规定频率成分fX的零相电压的指令值。同样地,“ωX”和 如上所述,逆变器3使用低频脉动成分~pM^αβ*、和与转换器2侧同样地将功率转换为电流的换算增益“GINV_LF^αβ”,决定转换器2内的循环电流。 另外,上述的式(20)所示的换算增益“GINV_LF^αβ”与前述的第一循环电流ACR1213的换算增益“GCNV_LF^αβ”同样地用于零相电流的控制,但也可以是与换算增益“GCNV_LF”相互不同的值。 例如,在控制部10的存储部分配了存储换算增益“GCNV_LF^αβ”和换算增益“GINV_LF^αβ”的区域,对它们进行规定的数据预先存储在该区域中。转换器控制部12使用换算增益“GCNV_LF^αβ”调整转换器2侧的零相电压的成分的大小(振幅)。逆变器控制部13使用换算增益“GINV_LF^αβ”调整逆变器3侧的零相电压的成分的大小(振幅)。由此,转换器2和逆变器3能够通过分别使用换算增益“GCNV_LF^αβ”和换算增益“GINV_LF^αβ”将各零相电压的成分的大小(振幅)独立地决定。 另外,控制部10与电力转换装置1的运转状态对应地将换算增益“GCNV_LF^αβ”和换算增益“GINV_LF^αβ”的比例预先或者适合地设定为适当的值,由此能够优化降低低频脉动功率的效果。上述的换算增益“GCNV_LF^αβ”和换算增益“GINV_LF^αβ”是转换率的一例。 如上所述,在使用换算增益“GCNV_LF^αβ”和换算增益“GINV_LF^αβ”的情况下,逆变器3基于换算增益“GINV_LF^αβ”叠加频率成分fX的零相电压,而且使同频率的循环电流在逆变器3内流过,由此降低源自基波频率fM的脉动功率。并且,转换器2基于换算增益“GCNV_LF^αβ”叠加频率成分fX的零相电压,而且使同频率的循环电流在转换器2内流过,由此降低源自基波频率fM的脉动功率。 在此情况下,转换器2和逆变器3对各自的零相电压的成分,既可以使用频率成分fX的正弦波,也可以使用频率成分fX的方形波。 根据上述的实施方式的电力转换装置1,转换器2(第一电力转换器)包括:转换器第一臂;转换器第二臂;第一正侧星形接线210,将转换器第一臂星形连接;第一负侧星形接线220,将转换器第二臂星形连接;以及第一交流连接端子201、202、203(第一端子),将第一正侧星形接线210和第一负侧星形接线220分别与电源侧交流系统7的各相连接,转换器第一臂和转换器第二臂对电源侧交流系统7的第一交流电和第一直流电进行相互转换。绝缘型的多个DCDC转换装置4000对所述第一直流电和第二直流电进行相互转换。逆变器3(第二电力转换器)包括:逆变器第一臂;逆变器第二臂;第二正侧星形接线310,将逆变器第一臂星形连接;第二负侧星形接线320,将逆变器第二臂星形连接;以及第二交流连接端子301、302、303(第二端子),将第二正侧星形接线310和第二负侧星形接线320分别与负载侧交流系统8的各相连接,逆变器第一臂和逆变器第二臂对所述第二直流电和第二交流电进行相互转换。 这样,对于电力转换装置1,第一正侧星形接线210和第一负侧星形接线220与电源侧交流系统7连接,第二正侧星形接线310和第二负侧星形接线320与负载侧交流系统8连接,由此转换器2和逆变器3使供给至电力转换装置的负载侧的有功功率的各相间的不平衡减轻,由此能够减轻上述的负载侧交流系统8的有功功率的各相间的不平衡对电源侧交流系统7的影响。 在上述结构的情况下,转换器2的转换器第一臂和转换器第二臂通过转换器星形接线连接成所谓的双星形。逆变器3的逆变器第一臂和逆变器第二臂通过逆变器星形接线连接成所谓的双星形。在这种情况下,与转换器2以三角形接线连接的情况相比,施加给各相的电压降低,所以各相的单相转换器单元的个数比三角形接线时的个数少。对于将逆变器3与负载侧交流系统8连接的情况也是一样的。 转换器控制部12可以控制转换器2,使得将有关电源侧交流系统7的基波反相电流包含于成分中的第一循环电流在第一正侧星形接线210和第一负侧星形接线220流过。在这种情况下,转换器2能够使基于通过第一循环电流ACR1213生成的rst相电压指令值vCNV_Z^dq*调整了电流量的第一循环电流流过。 在上述的情况下,逆变器控制部13可以控制逆变器3,调整在第二正侧星形接线310和第二负侧星形接线320流过的第二循环电流。在这种情况下,逆变器3能够使调整为基于通过第二循环电流ACR1313生成的uvw相电压指令值vINV_Z^dq*的电流量的第二循环电流流过。 另外,转换器控制部12和逆变器控制部13可以基于逆变器3的状态量计算上述的第一循环电流的调整量和第二循环电流的调整量。例如,速度FBK是逆变器3的状态量的一例。 另外,控制部10(电力转换控制装置)的转换器控制部12控制转换器2,使得作为在第一正侧星形接线210和第一负侧星形接线220流过的第一循环电流,流过与有关第一交流电的基波正相电流相对的基波反相电流。逆变器控制部13进行控制,使得第二循环电流在第二正侧星形接线310和第二负侧星形接线320流过。此时,转换器控制部12和逆变器控制部13可以使用规定的系数独立控制第一循环电流和第二循环电流。由此,能够减轻转换器控制部12和逆变器控制部13的调整量。 (变形例) 下面,对几种变形例进行说明。 在第一变形例中,可以是,逆变器控制部13检测逆变器3的第二单相全桥电路的直流侧的功率(第二直流电)的低频脉动成分作为逆变器3的状态量,转换器控制部12基于第二单相全桥电路的直流侧的功率的低频脉动成分,调整转换器2内的第一循环电流。由此,在产生了第二单相全桥电路的直流侧的功率的低频脉动成分的情况下,通过使第一循环电流在转换器2内流过,能够在转换器2侧减轻第二单相全桥电路的直流侧的功率的低频脉动成分的影响。 在第二变形例中,可以是,逆变器控制部13基于上述的第二直流电的直流电压的低频脉动成分,调整逆变器3内的第二循环电流,使得第二直流电的直流电压的低频脉动成分减少。由此,在产生了第二单相全桥电路的直流侧的功率的低频脉动成分的情况下,通过使第一循环电流在转换器2内流过,能够将第二单相全桥电路的直流侧的功率的低频脉动成分的影响减轻为不波及到转换器2侧。 在第三变形例中,在转换器2的多个单相转换器单元分别设置有第一电容器。转换器控制部12可以基于在多个单相转换器单元分别设置的第一电容器的电压的直流量和第二直流电的直流电压的低频脉动成分,调整第一交流电的基波的反相的第一循环电流,使得多个单相转换器单元的第一电容器的电压的直流量固定。 另外,上述的控制部10例如具有未图示的存储部、CPU(central processingunit,中央处理单元)、驱动部和取得部。存储部、CPU、驱动部和取得部例如通过BUS在控制部内连接。存储部包括半导体存储器。CPU包括按照软件程序执行期望的处理的处理器。驱动部按照CPU的控制,生成针对电力转换装置1的各部分的控制信号。取得部取得各电流传感器和各电压传感器的检测结果。例如,控制部10的CPU基于通过取得部所取得的电流传感器和电压传感器的检测结果,通过驱动部控制各相的主电路。控制部10既可以按照上面所述通过软件程序的处理来实现其处理的一部分或者全部,还可以替代软件程序而通过硬件来实现。另外,还可以适当地分割构成控制部10,由此可以确保电路的绝缘性。 对本发明的几个实施方式进行了说明,但这些实施方式是作为例子提示的,并非意图限定发明的范围。这些实施方式能够以其他各种各样的形态实施,在不脱离发明的主旨的范围内能够进行各种各样的省略、替换、变更等。这些实施方式及其变形被包含在发明的范围或主旨中,同样被包含在权利要求书所记载的发明和其等价的范围中。 另外,在以上的实施方式的说明中,作为各单相转换器单元、各单相逆变器单元、以及DCDC转换装置4000的单相全桥电路,示例了包括两电平的单相自励转换器,然而各单相转换器单元、各单相逆变器单元、以及DCDC转换装置4000的单相全桥电路不限于此,还可以是三电平和三电平以上的任意电平的单相自励转换器。在这种情况下,只要设置与电平数量相称的数量的电容器即可。 标号说明 1…电力转换装置;2…转换器(第一电力转换器);3…逆变器(第二电力转换器);4…DCDC转换装置组;5…转换器侧电容器组;6…逆变器侧电容器组;7…电源侧交流系统;8…负载侧交流系统;10…控制部;12…转换器控制部;13…逆变器控制部;210…第一正侧星形接线;220…第一负侧星形接线;201、202、203…第一交流连接端子;2110…r相第一臂;2120…s相第一臂;2130…t相第一臂;2210…r相第二臂;2220…s相第二臂;2230…t相第二臂;310…第二正侧星形接线;320…第二负侧星形接线;301、302、303…第二交流连接端子;3110…u相第一臂;3120…v相第一臂;3130…w相第一臂;3210…u相第二臂;3220…v相第二臂;3230…w相第二臂;2111~2114、2215~2218…单相转换器单元;3111~3114、3215~3218…单相逆变器单元;4111~4114、4215~4218、4000…DCDC转换装置;5111~5114、5215~5218…电容器(第一电容器);6111~6114、6215~6218…电容器(第二电容器)。
- 电力转换装置、电力转换装置的控制装置以及电力转换装置的控制方法
- 电力转换装置、电力转换装置的控制装置以及电力转换装置的控制方法