用于腹腔镜手术的微型机器人成像装置
文献发布时间:2023-06-19 09:49:27
技术领域
本公开涉及腹腔镜手术,并且更具体地说,涉及用于进行腹腔镜手术的机器人成像。
背景技术
腹腔镜手术是在腹部通过多个小切口进行的微创手术技术。腹腔镜手术中使用的手术工具之一是例如腹腔镜的成像装置。腹腔镜通常包含摄像头,所述摄像头产生例如患者体腔内的组织的目标区域的视频图像,以显示在视频监视器上。可在小切口中通过经皮套管针插入腹腔镜,以在腹腔中执行手术时提供可视化。通常,机械臂或辅助件专用于定位腹腔镜,使得外科医生可以看到患者体腔内的目标区域。用于这些成像装置的摄像头通常为2D或3D的,但提供极浅的景深,从而需要频繁地重新定位这些摄像头以获得目标区域的所有必要图像。
发明内容
因此,持续需要提供能提供宽的景深且限制为了获得此类成像而由机械臂或辅助件引起的定位难题的成像装置。
根据一个方面,本公开涉及一种微型机器人成像装置。所述微型机器人成像装置包含外壳、联接到所述外壳的摄像头和联接到所述外壳的支腿。所述支腿能相对于彼此移动以使所述摄像头在患者体内移动,以用于捕获所述患者身体的图像。
在一些实施例中,所述支腿、所述摄像头或其组合可与远程控制台无线通信。所述远程控制台可配置成操作所述支腿、所述摄像头或其组合。
在某些实施例中,摄像头能相对于外壳移动。
在实施例中,支腿能相对于外壳在缩回位置与伸出位置之间移动。当所述支腿安置在所述缩回位置中时,微型机器人成像装置可配置成穿过手术插管以用于将所述微型机器人成像装置选择性地定位在患者体内。当所述支腿安置在所述伸出位置中时,所述支腿能相对于所述外壳移动以使得所述微型机器人成像装置能够爬行。
在一些实施例中,支腿中的第一支腿可包含配置成抓紧组织的支脚。所述支脚能相对于所述第一支腿移动。所述支脚可包含第一臂和第二臂。
根据另一方面,本公开涉及一种用于捕获患者体腔的图像的微型机器人成像系统。所述微型机器人成像系统包含远程控制台和与所述远程控制台通信的微型机器人成像装置。所述微型机器人成像装置包含外壳、联接到所述外壳的摄像头和可移动地联接到所述外壳的支腿,以使得所述微型机器人成像装置能够在患者体腔中爬行。
在某些实施例中,远程控制台和微型机器人成像装置可以无线方式联接。所述远程控制台可以是可致动的,以操作所述微型机器人成像装置。
所述微型机器人成像系统可进一步包含手术插管,其中所述微型机器人成像装置可配置成穿过所述手术插管。支腿能在缩回位置与伸出位置之间移动,使得在所述缩回位置中,所述微型机器人成像装置可以穿过所述手术插管,而在所述伸出位置中,所述微型机器人成像装置无法穿过所述手术插管。
所述微型机器人成像系统可进一步包含抓紧器,所述抓紧器配置成使所述微型机器人成像装置穿过所述手术插管且将所述微型机器人成像装置选择性地定位在患者的体腔内。
根据本公开的又一方面,提供一种用微型机器人成像系统对患者身体进行体内成像的方法。所述方法包含:将微型机器人成像装置推进所述患者体内;远程控制所述微型机器人成像装置,使得所述微型机器人成像装置在所述患者体内爬行;并且用所述微型机器人成像装置捕获所述患者身体的图像。
所述方法可包含移动所述微型机器人成像装置的支腿,使得所述微型机器人成像装置沿所述患者体内的组织爬行。
所述方法可包含移动所述微型机器人成像装置的摄像头以捕获所述患者身体的图像。
所述方法可包含移动所述微型机器人成像装置的所述支腿以使得所述微型机器人成像装置能够配合穿过手术插管以选择性地进出所述患者身体。所述手术插管可具有所述微型机器人成像装置能穿过的直径。所述直径可为约5mm到约15mm。
根据以下描述、附图和权利要求书,其它方面、特征和优点将显而易见。
附图说明
并入本说明书中且构成本说明书的部分的附图示出了本公开的实施例,并连同上文给出的本公开的总体描述与下文给出的详细描述一起用以解释本公开的原理,其中:
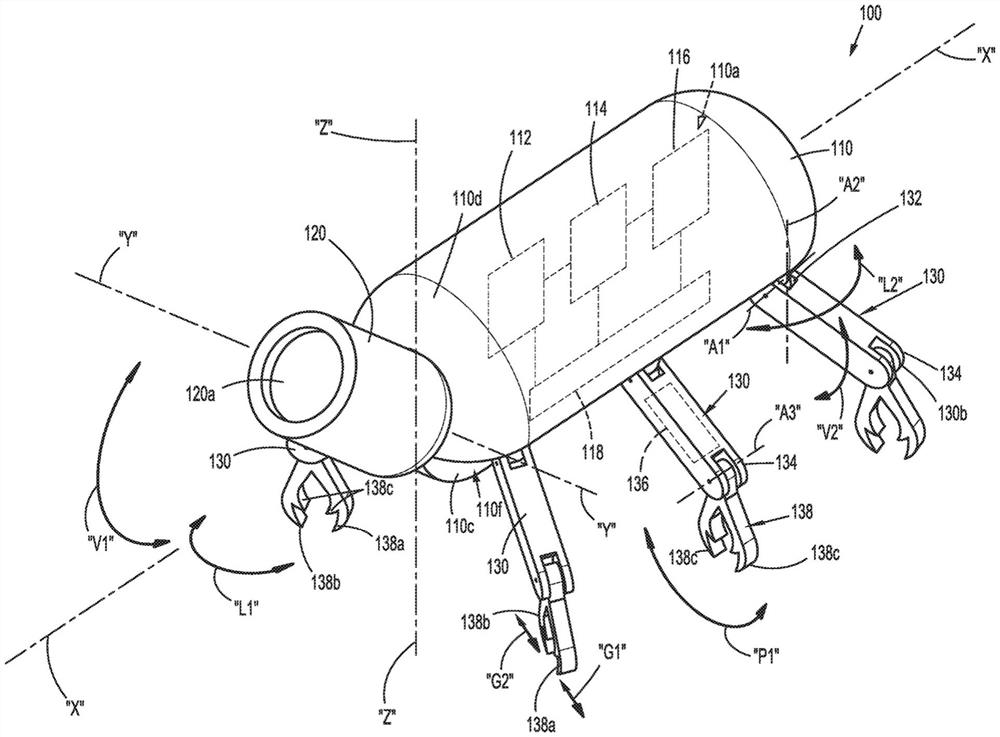
图1是根据本公开的处于伸出位置的微型机器人成像装置的前透视图;
图2是图1的微型机器人成像装置的后透视图;
图3是图1和图2的微型机器人成像装置处于缩回位置的侧面透视图;以及
图4-7是示出图1-3的微型机器人成像装置用于腹腔镜手术过程中的进展图。
具体实施方式
参考附图详细描述了当前公开的微型机器人成像装置的实施例,其中相同的附图标记在若干视图中的每一个图中表示相同或对应的元件。众所周知,术语“临床医生”是指医生、护士或任何其它医护人员且可包含辅助人员。另外,术语“近侧”是指结构的更接近临床医生的部分,并且术语“远侧”是指结构的更远离临床医生的部分。此外,例如前、后、上部、下部、顶部、底部等的方向术语仅为描述的方便起见而使用,且并不希望限制随附于此的公开内容。
在以下描述中,没有详细描述熟知的功能或构造,以避免在不必要的细节上混淆本公开。
当前公开的微型机器人成像装置配置成与机器人手术系统一起工作。此类系统利用各种机器人元件来辅助临床医生且允许远程操作(或部分远程操作)例如当前公开的微型机器人成像装置等手术器械,所述微型机器人成像装置可呈微型机器人无线摄像头的形式。机器人手术系统可与邻近手术室或位于远程位置的一个或多个控制台10(图4)一起使用,以例如与此类手术器械进行无线通信或操作此类手术器械。可以理解的是,控制台10可包含任何数量的机械和电气组件,例如,计算机、控制器、显示器、存储器、数据、软件等,使得高度熟练的临床医生可在不离开其远程控制台的情况下在多个位置执行多个操作,这在经济上和对患者或一系列患者都是有利的。
为了详细描述示例性医疗工作站和/或其组件,可参考第2012/0116416号美国专利申请公开和第WO2016/025132号PCT申请公开,所述申请公开中的每一个的全部内容以引用的方式并入本文中。
现在转向图1-3,本公开的微型机器人成像装置总体上被称作100。微型机器人成像装置或MRID 100包含外壳110、支撑在外壳110上的摄像头120以及枢转地联接到外壳110的多个支腿130。外壳110在其中限定空腔110a,所述空腔容纳协作以进行摄像头120和/或支腿130的操作的任何数量的电机112、电路系统114(例如,CPU、传感器、芯片、发射器、接收器、存储器、布线、扬声器、麦克风等)、电源116(例如,电池)和/或机械驱动器118(例如,齿轮、线缆、滑轮、轴承、螺钉、螺母等)。外壳110进一步限定穿过其中的纵向轴线“X”和外壳110的远端部分110d上的轴线“Y”和“Z”,其中轴线“X”、“Y”和“Z”相对于彼此垂直地安置,以限定三维笛卡尔坐标系(Cartesian coordinate system)。外壳110进一步包含沿着外壳110的底部表面延伸的隆起110c,且沿着隆起110c的相对侧限定存储通道110e、110f(图2)。
如竖直箭头“V1”和横向箭头“L1”所示,MRID 100的摄像头120可支撑在外壳110上,并且可绕纵向轴线“X”且相对于外壳110的轴线“Y”和“Z”多轴移动,以获得由摄像头120捕获的目标部位的成像。摄像头120可配置成与控制台10通信(例如,通过有线通信或无线通信,例如蓝牙、Wi-Fi等),以例如向控制台传输数据或从其接收数据。摄像头120配置成与电路系统114通信,例如与所述电路系统的一个或多个存储器装置(例如,RAM、ROM等)通信,以例如在其上存储图像和/或音频数据(例如,图片、视频、声音等)。摄像头120包含一个或多个镜头120a,所述镜头接收图像且与外壳110的电路系统114协作以存储和/或传输图像数据。
MRID 100的每个支腿130具有支撑外壳接头132的第一端130a和支撑支脚接头134的第二端130b。外壳接头132限定轴线“A1”和“A2”,并将支腿130联接到外壳110,使得支腿130可以绕轴线“A1”和“A2”且相对于外壳110(例如,横向和/或竖直地)多轴枢转,如横向箭头“L2”和竖直箭头“V2”所指示。支腿130支撑支脚驱动器136,所述支脚驱动器可操作地联接到支撑在外壳110中的电机112、电路系统114、电源116和/或机械驱动器118。支脚驱动器136还可操作地联接到支脚138,所述支脚联接到支腿130的支脚接头134,所述支脚接头限定支脚138的枢转轴线“A3”。支脚驱动器136可致动以使支脚138绕支脚接头134的枢转轴线“A3”枢转,如由箭头“P1”所指示。支脚驱动器136可以包含一个或多个合适的机械组件(例如,齿轮、滑轮、电缆、螺钉等)和/或电气组件(例如,电机、电路系统等)以操控支脚138。
支腿130的支脚138包含第一臂138a和第二臂138b,每个臂包含配置成有助于夹持组织的齿状物138c。如箭头“G1”和“G2”所示,支脚驱动器136可配置成致动支脚138,使得其第一臂138a和/或第二臂138b相对于彼此绕枢转轴线“A3”在打开位置与闭合位置之间枢转,以选择性地抓紧第一臂138a和第二臂138b之间的组织。在支脚138的打开位置中,支脚138的第一臂138a和第二臂138b彼此间隔开或不接近,而在支脚138的闭合位置(未示出)中,其第一臂138a和第二臂138b彼此接近或非常接近(并且可能彼此接触)。
如在图2和3中所见,MRID 100的支腿130可在伸出位置(图2)与缩回位置(图3)之间移动。在伸出位置(图2),支腿130或其部分可选择性地一起和/或彼此独立地移动,以使得MRID 100能够沿着例如组织“T”(参见图4和图5)的表面爬行和/或攀爬(爬上和/或爬下)。在缩回位置(图3),MRID 100定位成借助例如抓紧器的手术器械300通过例如套管针(例如5mm-15mm)的插管200插入体腔“BC”和/或从体腔“BC”移除。对于示例套管针的更详细的描述,可以参考Racenet等人的第6,482,181号美国专利,而对于示例抓紧器的更详细描述,可以参考Kapadia的第2017/0224367号美国专利申请公开,所述专利中的每一个的全部内容以引用的方式并入本文中。
参考图1-6,在插管200穿过例如腹壁“W”插入且MRID 100安置在其缩回位置的情况下,抓紧器300可以抓紧MRID 100并将MRID 100推过插管200进入体腔“BC”。可将MRID100a和MRID 100b等任何数量的MRID 100推过插管200并定位到体腔“BC”中,其中每个MRID100可以远程定位到其伸出位置,以实现MRID 110的爬行运动。当处于伸出位置时,每个MRID 100与控制台10(或与其它MRID 100和/或如抓紧器300的其它手术器械)无线通信,使得每个MRID可爬到体腔“BC”内的任何合适位置(例如,邻近于插管200或与插管200相隔甚远)。具体来说,可以对MRID 100进行遥控操控,使得MRID 100的支腿130沿着组织“T”爬行以到达期望位置,或移动所述支腿以改变或到达不同位置。可以根据需要重复此类过程或重新定位。MRID 100的摄像头120还可以根据需要进行定位或重新定位以获得用于进行某个过程(例如,手术、治疗和/或诊断)的期望图像或声音。当完成所述过程时,MRID 100可以朝着插管200往回移动,使得抓紧器300可以抓住MRID 100并通过插管200移除MRID 100,其中MRID 100定位在其缩回位置。
在一些实施例中,一个或多个当前公开的支脚可包含类似于昆虫脚的具有钩或倒钩的单个臂,以用于像抓钩一样抓紧组织。
如可了解,可以使用例如焊接、压接、胶合、扣接等已知紧固技术来实现对当前公开的设备的组件中的任一个的紧固。
所属领域的技术人员将理解,本文中具体描述并在附图中示出的结构和方法是非限制性的示例性实施例,并且所述描述、公开和图式应仅被解释为具体实施例的示例。因此,应理解,本公开不限于所描述的精确实施例,且所属领域的技术人员可在不脱离本公开的范围或精神的情况下实现各种其它改变和修改。另外,预见到结合一个示例性实施例说明或描述的元件和特征可与不脱离本公开的范围的另一示例性实施例的元件和特征组合,并且此类修改和变化还意图包含在本公开的范围内。实际上,目前公开的元件和特征中的任何者的任何组合在本公开的范围内。因此,本公开的主题并不受到已特定展示和描述的内容的限制。
- 用于腹腔镜手术的微型机器人成像装置
- 用于肠道微型机器人的剪刀式径向扩张装置