一种适用于微创手术的便于手持型切割吻合器
文献发布时间:2023-06-19 09:52:39
技术领域
本发明属于吻合器技术领域,具体涉及一种适用于微创手术的便于手持型切割吻合器。
背景技术
血管吻合手术是一项难度较大的手术,术者需要经过较长期的严格训练,该手术方法广泛应用于游离皮瓣重建缺损,断肢再植,血管重建等。其中血管吻合的质量是手术成功的关键。很多研究表明,和传统的显微血管缝线缝合血管相比,应用吻合器械吻合血管的速度要快4-5倍,吻合的强度也足够,通畅率几乎可达100%。血管吻合器根据材料不同有环钉,夹子,黏结剂,支架,激光焊接五类,目前在临床上应用最为成功的是环钉。
在专利号为CN201420719348.1 ,专利名称为一种钳式环钉血管吻合器的专利中记载到:在血管尺寸测量和吻合器吻合的方法上进行创新,从而达到可精确测量血管直径,选择准确地吻合器型号,钳式吻合简单,方便,可靠,医生易于掌握。
但现有技术中:医护人员长时间握持本体时容易因肌肉酸痛或意外情况导致本体从手部脱落,另外,不能够稳定的进行压钉动作。
发明内容
本发明的目的在于提供一种适用于微创手术的便于手持型切割吻合器,以解决现有的的问题。
为实现上述目的,本发明提供如下技术方案:一种适用于微创手术的便于手持型切割吻合器,包括本体、按压板、钉仓和底板,所述按压板、所述钉仓和所述底板转动连接,所述本体的一端与所述底板通过连接,所述本体包括把手,所述把手的中部设有一握持空间,所述握持空间的两侧安装有气囊。
作为本发明一种适用于微创手术的便于手持型切割吻合器优选地,所述气囊共设置有两个,两个所述气囊相对的一侧表面均设有第一凸起。
作为本发明一种适用于微创手术的便于手持型切割吻合器优选地,所述把手的一侧安装有固定杆,所述固定杆上固定有第一绑带和第二绑带。
作为本发明一种适用于微创手术的便于手持型切割吻合器优选地,所述第一绑带远离所述固定杆的一端设有毛面,所述第二绑带远离所述固定杆的一端设有勾面,所述第一绑带绕所述把手一周,其一端设置的毛面与所述第二绑带上设置的勾面固定。
作为本发明一种适用于微创手术的便于手持型切割吻合器优选地,还包括压钉套,所述压钉套通过驱动装置驱动。
作为本发明一种适用于微创手术的便于手持型切割吻合器优选地,所述驱动装置包括安装座,所述安装座的内部转动连接有驱动轮,所述驱动轮的边缘位置处设置有第二轮齿,所述驱动轮的下方设置有滑块,所述滑块的上表壁设有第一轮齿,所述第一轮齿与所述第二轮齿啮合,所述滑块的下方安装有滑座,所述滑块与所述滑座滑动连接,所述滑座固定于底板的底部,所述滑块靠近所述钉仓的一端与压钉套固定。
作为本发明一种适用于微创手术的便于手持型切割吻合器优选地,所述滑块的两端均开设有限位槽,所述驱动轮的两端均设置有第二凸起,所述第二凸起与所述限位槽相适配。
作为本发明一种适用于微创手术的便于手持型切割吻合器优选地,所述驱动轮上连接有一手柄。
作为本发明一种适用于微创手术的便于手持型切割吻合器优选地,所述底板的上表面设置有成型槽。
本发明与现有技术相比,具有以下有益效果:
(1)本发明在握持空间两侧设置的气囊能够对手部进行挤压,避免在手持本体时,本体从手部脱落的问题;每个气囊表面均设置四个第一凸起,四个第一凸起与手部握拳时形成的关节凹槽相适配,使得在握持把手时,手部更加舒适;为进一步防止本体从手部脱落,在使用时,将第一绑带从把手的后方绕至把手的前方,使第一绑带一端设置的勾面与所述第二绑带一端设置的勾面贴合,从而将手腕与本体进行固定。
(2)本发明通过驱动轮转动,使得滑块缓慢、稳定的向钉仓一侧移动,在滑块的推动下,与滑块一端固定的压钉套能够缓慢、稳定的随着滑块一起向钉仓一侧移动,对按压板进行挤压。
附图说明
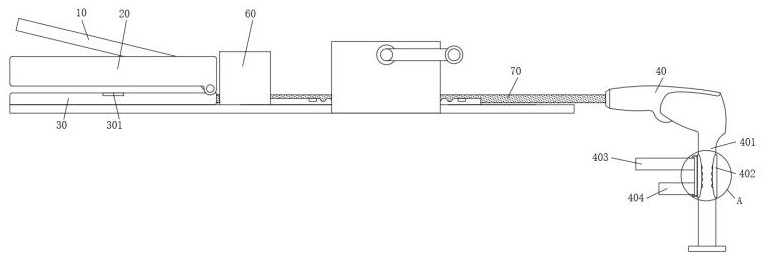
图1为本发明实施例中的结构示意图之一;
图2为本发明图1中A处的局部放大图;
图3为本发明实施例中第一绑带的结构示意图;
图4为本发明实施例中第二绑带的结构示意图;
图5为本发明实施例中的结构示意图之二;
图6为本发明实施例中的结构示意图之三;
图7为本发明实施例中滑座的俯视图;
图8为本发明实施例中的压钉套和连接杆的侧视图;
图中:10、按压板;20、钉仓;30、底板;301、成型槽;40、本体;401、把手;402、气囊;403、第一绑带;404、第二绑带;405、第一凸起;406、固定杆;407、毛面;408、勾面;409、握持空间;50、驱动装置;501、安装座;502、手柄;503、滑块;504、限位槽;505、第一轮齿;506、滑座;507、驱动轮;508、第二凸起;509、第二轮齿;60、压钉套;70、连接杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-图4所示:
图1为本发明实施例中的结构示意图之一;
图2为本发明图1中A处的局部放大图;
图3为本发明实施例中第一绑带的结构示意图;
图4为本发明实施例中第二绑带的结构示意图;
本发明提供如下技术方案:一种适用于微创手术的便于手持型切割吻合器,包括本体40、按压板10、钉仓20和底板30,所述按压板10、所述钉仓20和所述底板30转动连接,所述本体40的一端与所述底板30通过70连接,所述本体40包括把手401,所述把手401的中部设有一握持空间409,所述握持空间409的两侧安装有气囊402。
具体的,所述气囊402共设置有两个,两个所述气囊402相对的一侧表面均设有第一凸起405。
进一步的,所述把手401的一侧安装有固定杆406,所述固定杆406上固定有第一绑带403和第二绑带404。
更进一步的,所述第一绑带403远离所述固定杆406的一端设有毛面407,所述第二绑带404远离所述固定杆406的一端设有勾面408,所述第一绑带403绕所述把手401一周,其一端设置的毛面407与所述第二绑带404上设置的勾面408固定。
值得说明的是,通过驱动装置驱动按压板10向下按压,按压板10下表壁设置的压块与压钉柱顶部开设的滑槽接触,压钉柱下压时,使压钉柱复位弹簧受到限位板的阻挡停止向下,而压钉柱继续向下,将钉由出钉孔处按出,通过成型槽301的配合使用,将钉仓20底壁与底板30上壁之间的组织进行缝合;缝合后,撤销驱动装置的驱动,按压板10在压钉柱复位弹簧的弹性恢复力下,将按压板10复位,钉仓20与底板30在其连接处设置的扭簧的作用下复位;推钉弹簧推动推钉块,使下一个钉移动至出钉孔的位置处,等待下一轮吻合动作。
本实施例中,气囊402采用硅胶材质,使用时,手部插入握持空间409内,在握持空间409两侧设置的气囊402能够对手部进行挤压,避免在手持本体40时,本体40从手部脱落的问题;
每个气囊402表面均设置四个第一凸起405,四个第一凸起405与手部握拳时形成的关节凹槽相适配,使得在握持把手401时,手部更加舒适;
为进一步防止本体40从手部脱落,在使用时,将第一绑带403从把手401的后方绕至把手401的前方,使第一绑带403一端设置的勾面408与所述第二绑带404一端设置的勾面408贴合,从而将手腕与本体40进行固定。
请参阅图5-图8所示:
图5为本发明实施例中的结构示意图之二;
图6为本发明实施例中的结构示意图之三;
图7为本发明实施例中滑座的俯视图;
图8为本发明实施例中的压钉套和连接杆的侧视图;
本发明提供如下技术方案:一种适用于微创手术的便于手持型切割吻合器,还包括压钉套60,所述压钉套60通过驱动装置50驱动。
具体的,所述驱动装置50包括安装座501,所述安装座501的内部转动连接有驱动轮507,所述驱动轮507的边缘位置处设置有第二轮齿509,所述驱动轮507的下方设置有滑块503,所述滑块503的上表壁设有第一轮齿505,所述第一轮齿505与所述第二轮齿509啮合,所述滑块503的下方安装有滑座506,所述滑块503与所述滑座506滑动连接,所述滑座506固定于底板30的底部,所述滑块503靠近所述钉仓20的一端与压钉套60固定。
进一步的,所述滑块503的两端均开设有限位槽504,所述驱动轮507的两端均设置有第二凸起508,所述第二凸起508与所述限位槽504相适配。
更进一步的,所述驱动轮507上连接有一手柄502。
值得说明的是,所述底板30的上表面设置有成型槽301。
本实施例中,驱动装置50包括安装座501、手柄502、滑块503、限位槽504、第一轮齿505、滑座506、驱动轮507、第二凸起508和第二轮齿509,使用时,手握手柄502,顺时针旋转手柄502,手柄502带动驱动轮507转动,由于第二轮齿509与第一轮齿505的啮合作用,能够使得滑块503向钉仓20一侧移动,在滑块503的推动下,与滑块503一端固定的压钉套60随着滑块503一起向钉仓20一侧移动,对按压板10进行挤压,以进行压钉、出钉的工作;吻合过程完成后,逆时针旋转手柄502,即可将压钉套60退回;在驱动轮507的一端转动至底部时,通过限位槽504对第二凸起508进行限位,避免滑块503在惯性力的作用下与滑座506脱离。
本发明的工作原理及使用流程:通过驱动装置驱动按压板10向下按压,按压板10下表壁设置的压块与压钉柱顶部开设的滑槽接触,压钉柱下压时,使压钉柱复位弹簧受到限位板的阻挡停止向下,而压钉柱继续向下,将钉由出钉孔处按出,通过成型槽301的配合使用,将钉仓20底壁与底板30上壁之间的组织进行缝合;缝合后,撤销驱动装置的驱动,按压板10在压钉柱复位弹簧的弹性恢复力下,将按压板10复位,钉仓20与底板30在其连接处设置的扭簧的作用下复位;推钉弹簧推动推钉块,使下一个钉移动至出钉孔的位置处,等待下一轮吻合动作;
通过驱动装置50驱动压钉套60,使用时,手握手柄502,顺时针旋转手柄502,手柄502带动驱动轮507转动,由于第二轮齿509与第一轮齿505的啮合作用,能够使得滑块503向钉仓20一侧移动,在滑块503的推动下,与滑块503一端固定的压钉套60随着滑块503一起向钉仓20一侧移动,对按压板10进行挤压,以进行压钉、出钉的工作;吻合过程完成后,逆时针旋转手柄502,即可将压钉套60退回;在驱动轮507的一端转动至底部时,通过限位槽504对第二凸起508进行限位,避免滑块503在惯性力的作用下与滑座506脱离。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种适用于微创手术的便于手持型切割吻合器
- 一种适用于微创手术的切割吻合器