一种测地车驾驶模拟仿真系统
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及模拟仿真技术领域,具体为一种测地车驾驶模拟仿真系统。
背景技术
测地车亦称“连测车”。用于自动测定炮阵地和观察所坐标的专用车辆。车上装有陀螺车向仪、路程传送器、测地计算机、绘图仪、光学测角仪器和电源设备。作业时,在起始点装定起始坐标和方位后,行进中可以自动连续显示所在点坐标和车向方位,并能自动标绘行进路线。20世纪70年代研制出炮载和车载的惯性定位定向系统,90年代炮兵装备了可以实时定位的卫星导航定位系统,但是传统的测提车模拟装置,只能针对视觉进行模拟,并不能模拟出真实的路感和感知环境。
发明内容
针对现有技术的不足,本发明提供了一种测地车驾驶模拟仿真系统,解决了传统的测提车模拟装置,只能针对视觉进行模拟,并不能模拟出真实的路感和感知环境的问题。
为实现上述目的,本发明提供如下技术方案:一种测地车驾驶模拟仿真系统,包括仿真模块、辅助模块和驱动模块,所述的仿真模块包括底板、显示屏支架、显示屏、模拟扇支架、模拟扇、仿真主动齿轮、仿真电机、仿真电机支架和仿真从动齿轮,所述底板上方的两侧通过显示屏支架均固定连接有显示屏。
所述的辅助模块包括辅助板、辅助弹簧、辅助限位环、辅助滑杆、辅助摆动板、辅助摆动轮、辅助电机、辅助电机支架和辅助板支架,所述底板的中上方通过辅助板支架固定连接有辅助板,辅助板上表面的中心开设有通孔,通孔的边缘处通过辅助电机支架固定连接有辅助电机。
所述的驱动模块包括驱动板、拱板连接杆支架、拱板连接杆、拱板、摆动底座、摇摆杆支架、摇摆杆、中间摆杆、驱动摆杆、中间主动齿轮、中间齿轮支架、中间从动齿轮、驱动摆杆支架、驱动电机、驱动主动齿轮、驱动电机支架和驱动执行齿轮,所述驱动板的上表面通过四个拱板连接杆支架和两个拱板连接杆固定连接有拱板,拱板的上表面滑动连接有摆动底座。
优选的,所述显示屏的前方设置有模拟扇,模拟扇与底板通过模拟扇支架转动连接,所述模拟扇的侧方通过连接轴固定连接有仿真从动齿轮。
优选的,所述仿真从动齿轮的外表面齿轮连接有仿真主动齿轮,仿真主动齿轮的侧方设置有仿真电机,仿真电机的输出轴与仿真主动齿轮固定连接,所述仿真电机与模拟扇支架通过仿真电机支架固定连接。
优选的,所述辅助电机的输出轴固定连接有辅助摆动轮,辅助摆动轮的侧面与驱动板下表面的中心通过辅助摆动板活动连接。
优选的,所述驱动板与辅助板之间通过辅助滑杆滑动连接,所述辅助板和驱动板的相对面之间固定连接有辅助弹簧,并且所述辅助弹簧环绕在辅助滑杆的外侧,所述辅助滑杆的底端固定连接有辅助限位环。
优选的,所述摆动底座的下表面固定连接有摇摆杆,摇摆杆的中下部活动连接有摇摆杆支架,摇摆杆支架与拱板的下表面固定连接。
优选的,所述摇摆杆的底端活动连接有中间摆杆,中间摆杆远离摇摆杆的一端活动连接有驱动摆杆,驱动摆杆顶端的侧方通过连接轴固定连接驱动执行齿轮,所述驱动摆杆和驱动执行齿轮与摇摆杆支架通过驱动摆杆支架转动连接。
优选的,所述驱动执行齿轮的外表面齿轮连接有中间主动齿轮,中间主动齿轮的侧方通过连接轴固定连接有中间从动齿轮,所述中间主动齿轮和中间从动齿轮与摇摆杆支架通过中间齿轮支架转动连接。
优选的,所述中间从动齿轮的外表面齿轮连接有驱动主动齿轮,驱动主动齿轮的侧方设置有驱动电机,驱动电机的输出轴与驱动主动齿轮固定连接,所述驱动电机与摇摆杆支架通过驱动电机支架固定连接。
与现有技术相比,本发明提供了一种测地车驾驶模拟仿真系统,具备以下有益效果:本发明通过设置仿真模块,可以在两个显示屏上播放需要模拟的环境,并且模拟扇会带动周围的空气流动,从而模拟出真实的环境,通过设置驱动模块,可以使摆动底座带动使用者摆动,从而使本装置可以模拟出转弯时受到的离心力。
附图说明
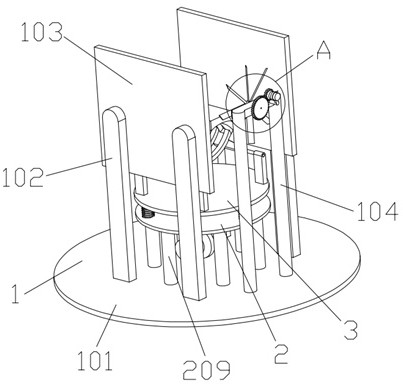
图1为本发明结构示意图。
图2为本发明仿真从动齿轮处结构示意图。
图3为本发明结构示意图之一。
图4为本发明驱动模块结构示意图。
图5为本发明辅助模块结构示意图。
图中:1-仿真模块;101-底板;102-显示屏支架;103-显示屏;104-模拟扇支架;105-模拟扇;106-仿真主动齿轮;107-仿真电机;108-仿真电机支架;109-仿真从动齿轮;2-辅助模块;201-辅助板;202-辅助弹簧;203-辅助限位环;204-辅助滑杆;205-辅助摆动板;206-辅助摆动轮;207-辅助电机;208-辅助电机支架;209-辅助板支架;3-驱动模块;301-驱动板;302-拱板连接杆支架;303-拱板连接杆;304-拱板;305-摆动底座;306-摇摆杆支架;307-摇摆杆;308-中间摆杆;309-驱动摆杆;310-中间主动齿轮;311-中间齿轮支架;312-中间从动齿轮;313-驱动摆杆支架;314-驱动电机;315-驱动主动齿轮;316-驱动电机支架;317-驱动执行齿轮。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1、图2、图3、图4、图5所示,本发明提供一种技术方案:一种测地车驾驶模拟仿真系统,包括仿真模块1、辅助模块2和驱动模块3,如图1和图2,其中仿真模块1包括底板101、显示屏支架102、显示屏103、模拟扇支架104、模拟扇105、仿真主动齿轮106、仿真电机107、仿真电机支架108和仿真从动齿轮109,底板101上方的两侧通过显示屏支架102均固定连接有显示屏103,显示屏103的前方设置有模拟扇105,模拟扇105与底板101通过模拟扇支架104转动连接,模拟扇105的侧方通过连接轴固定连接有仿真从动齿轮109,仿真从动齿轮109的外表面齿轮连接有仿真主动齿轮106,仿真主动齿轮106的侧方设置有仿真电机107,仿真电机107的输出轴与仿真主动齿轮106固定连接,仿真电机107与模拟扇支架104通过仿真电机支架108固定连接。
如图5为本发明辅助模块结构图,其中辅助模块2包括辅助板201、辅助弹簧202、辅助限位环203、辅助滑杆204、辅助摆动板205、辅助摆动轮206、辅助电机207、辅助电机支架208和辅助板支架209,底板101的中上方通过辅助板支架209固定连接有辅助板201,辅助板201上表面的中心开设有通孔,通孔的边缘处通过辅助电机支架208固定连接有辅助电机207,辅助电机207的输出轴固定连接有辅助摆动轮206,辅助摆动轮206的侧面与驱动板301下表面的中心通过辅助摆动板205活动连接,驱动板301与辅助板201之间通过辅助滑杆204滑动连接,辅助板201和驱动板301的相对面之间固定连接有辅助弹簧202,并且辅助弹簧202环绕在辅助滑杆204的外侧,辅助滑杆204的底端固定连接有辅助限位环203。
如图4为本发明驱动模块结构图,其中驱动模块3包括驱动板301、拱板连接杆支架302、拱板连接杆303、拱板304、摆动底座305、摇摆杆支架306、摇摆杆307、中间摆杆308、驱动摆杆309、中间主动齿轮310、中间齿轮支架311、中间从动齿轮312、驱动摆杆支架313、驱动电机314、驱动主动齿轮315、驱动电机支架316和驱动执行齿轮317,驱动板301的上表面通过四个拱板连接杆支架302和两个拱板连接杆303固定连接有拱板304,拱板304的上表面滑动连接有摆动底座305,摆动底座305的下表面固定连接有摇摆杆307,摇摆杆307的中下部活动连接有摇摆杆支架306,摇摆杆支架306与拱板304的下表面固定连接,摇摆杆307的底端活动连接有中间摆杆308,中间摆杆308远离摇摆杆307的一端活动连接有驱动摆杆309,驱动摆杆309顶端的侧方通过连接轴固定连接驱动执行齿轮317,驱动摆杆309和驱动执行齿轮317与摇摆杆支架306通过驱动摆杆支架313转动连接,驱动执行齿轮317的外表面齿轮连接有中间主动齿轮310,中间主动齿轮310的侧方通过连接轴固定连接有中间从动齿轮312,中间主动齿轮310和中间从动齿轮312与摇摆杆支架306通过中间齿轮支架311转动连接,中间从动齿轮312的外表面齿轮连接有驱动主动齿轮315,驱动主动齿轮315的侧方设置有驱动电机314,驱动电机314的输出轴与驱动主动齿轮315固定连接,驱动电机314与摇摆杆支架306通过驱动电机支架316固定连接。
在使用时,使用者首先将座椅固定在摆动底座305上表面,这时使用者坐在椅子上,然后启动仿真电机107,仿真电机107的输出轴就会带动仿真主动齿轮106转动,仿真主动齿轮106转动就会带动仿真从动齿轮109转动,仿真从动齿轮109转动就会带动模拟扇105转动,模拟扇105转动就会带动周围的空气流动,从而模拟出真实的环境,同时使用者可以在两个显示屏103上播放需要模拟的环境,当使用者需要左右晃动时,可以启动驱动电机314,驱动电机314的输出轴就会带动驱动主动齿轮315转动,驱动主动齿轮315转动就会带动中间从动齿轮312转动,中间从动齿轮312转动就会带动中间主动齿轮310转动,中间主动齿轮310转动就会带动驱动执行齿轮317转动,驱动执行齿轮317转动就会带动驱动摆杆309摆动,驱动摆杆309摆动就会通过中间摆杆308带动摇摆杆307摆动,摇摆杆307摆动就会带动顶部的摆动底座305摆动,摆动底座305摆动就会带动使用者摆动,从而使本装置可以模拟出转弯时受到的离心力,当使用者需要模拟颠簸时,使用者需要启动辅助电机207,辅助电机207的输出轴就会带动辅助摆动轮206转动,辅助摆动轮206转动就会通过辅助摆动板205带动驱动模块3整体上下移动,并且配合上辅助弹簧202,这时使用者就会产生颠簸的感觉。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种测地车驾驶模拟仿真系统
- 一种基于模拟驾驶仿真系统的驾驶信息指示方法及装置