一种基于结构光与AprilTag的位姿识别方法及系统
文献发布时间:2023-06-19 09:54:18
技术领域
本发明属于机器视觉检测领域,涉及一种基于结构光与AprilTag的位姿识别方法及系统。
背景技术
随着电子商务的发展,对物品的入库、储存、管理、出库监管提出了新的要求,如何高效准确地运送仓库中的物品是仓储管理系统能够快速运作的关键。在仓储物流系统中,货物通常会装在输送箱中,通常情况下输送箱都会整齐地存放在货架的指定位置之上,但由于机器失误等原因有时会导致输送箱偏离指定位置或摆放角度存在一定歪斜的情况出现。上述情况都会给仓库的管理、统计带来困难,影响仓库的正常运转。
为解决上述问题,仓库就要根据仓库实际情况,需要判断输送箱的摆放情况。在识别物体位姿过程中,发现被测物体表面无剩余空间粘贴识别标签并且被测物体数量巨大,没有相应的人力和时间粘贴标签,实用价值低。
故,需要一种新的技术方案以解决上述问题。
发明内容
本发明的目的在于提供一种基于结构光与AprilTag标签的位姿识别方法及系统,以解决仓储系统中物体摆放位置歪斜和错位的技术问题。
为实现上述目的,本发明提供的基于结构光与AprilTag标签的位姿识别系统采用以下技术方案:
一种基于结构光与AprilTag标签的位姿识别系统,包括单目摄像头、投影装置、AGV小车、图像处理模块电路、中控模块电路板及供电模块;
投影装置将ApriTag标签影像投射至要检测的物体表面,摄像头采集ApriTag图像后对其进行清晰化处理,以便用于确定物体的空间位姿;;摄像头与图像处理模块电路集成在一起,摄像头识别到AprilTag后,图像处理模块对识别到的标签图象进行清晰化处理,而后对AprilTag包含的位姿信息进行识别,再传给中控模块用于与后续设备的通信。
进一步的,投射装置其结构包括高清LED光源、半透明高清显示屏、图像大小调整板、图象位置调整版、主板、透镜;LED光源发出强光照在半透明高清显示屏上;半透明高清显示屏中的图象被映射在图象大小调整板上;图像大小调整板通过调整图像的像素密度调整图像的大小;图像通过图像大小调整板调整好大小后被映射在图象位置调整板上并通过透镜被投射出。
本发明提供的基于结构光与AprilTag标签的位姿识别方法采用以下技术方案:
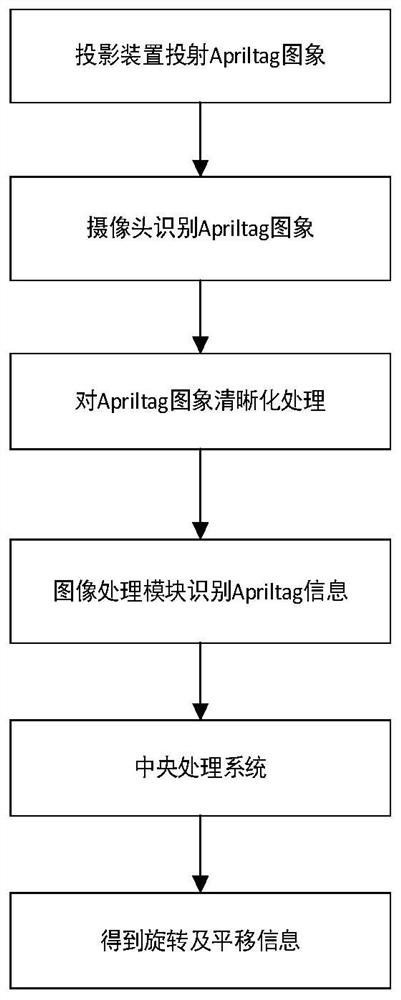
一种基于结构光与AprilTag的位姿识别方法,包括如下步骤:
步骤1、制作投射装置;
步骤2、安装于AGV小车上的投影装置投射出AprilTag标签的影像于被检测物体表面上,保证安装于AGV小车上的单目摄像头可以完整的拍摄到AprilTag影像;
步骤3、摄像头采集到AprilTag标签影像后,对其进行清晰化处理;
步骤4、自动进入图像处理模块中预先写好的AprilTag算法程序,计算出我们所需的物体旋转角度与位移信息;
步骤5、图像处理模块与中控模块通过串口通信协议完成上述信息的传递。
进一步的,所述步骤1中的投射装置其结构包括高清LED光源、半透明高清显示屏、图像大小调整板、图象位置调整版、主板、透镜;投影装置的工作步骤如下:
步骤1.1、LED光源发出强光照在半透明高清显示屏上;
步骤1.2、半透明高清显示屏中的图象被映射在图象大小调整板上;图像大小调整板通过调整图像的像素密度调整图像的大小;
步骤1.3、图像通过图像大小调整板调整好大小后被映射在图象位置调整板上;
步骤1.4、图像通过透镜被投射出。
进一步的,所述步骤2中的对采集到的AprilTag图象进行清晰化处理,包括以下步骤:
步骤2.1、对图像进行畸变矫正;
步骤2.2、对图像进行核滤波,其中核矩阵设为
步骤2.3、对图象进行灰度二值化,图像部分的全部像素变为1白,将在阈值外的部分全部像素变为0黑。
有益效果:本发明提供的技术方案中,通过单目摄像头与投影装置组成结构光系统,与图像处理模块电路、中控模块电路板及供电模块等都可以安装在仓储系统里的AGV小车上,投影装置与单目摄像头对准要测量的物体。结构光系统中的投影装置将AprilTag标签的影像投射在物体表面上,单目摄像头通过识别AprilTag标签,得出AprilTag的位置信息,即物体的位置信息,从而测出物体旋转角度与平移距离。本发明的物体旋转角度与平移距离的测量方法解决了实际应用场景中因物体表面形状问题不能粘贴AprilTag标签的情况,并且拥有更好的实时性,定位准确,响应速度快,工作效率高,与其它智能化设备配合好。
附图说明
图1为本发明一种基于结构光与AprilTag标签的位姿识别方法流程图。
图2为投影装置结构原理示意图。
图3为清晰化AprilTag标签图象的算法流程图。
图4为本发明的应用场景示意图。
图5为结构光原理示意图。
具体实施方式
为了详细说明本发明的技术内容,实现目的及效果,以下结合实施方式并配合附图进行详细说明。
请结合图1及图2所示,本发明提供一种基于结构光与AprilTag标签的位姿识别系统,包括单目摄像头、投影装置、AGV小车、图像处理模块电路、中控模块电路板及供电模块。其中,投影装置将ApriTag标签影像投射至要检测的物体表面,摄像头采集ApriTag图像后对其进行清晰化处理,以便用于确定物体的空间位姿;;摄像头与图像处理模块电路集成在一起,摄像头识别到AprilTag后,图像处理模块对识别到的标签图象进行清晰化处理,而后对AprilTag包含的位姿信息进行识别,再传给中控模块用于与后续设备的通信。投射装置其结构包括高清LED光源、半透明高清显示屏、图像大小调整板、图象位置调整版、主板、透镜;LED光源发出强光照在半透明高清显示屏上;半透明高清显示屏中的图象被映射在图象大小调整板上;图像大小调整板通过调整图像的像素密度调整图像的大小;图像通过图像大小调整板调整好大小后被映射在图象位置调整板上并通过透镜被投射出。
而本发明提供的基于结构光与AprilTag的位姿识别方法,包括如下步骤:
步骤1、制作投射装置。
步骤2、安装于AGV小车上的投影装置投射出AprilTag标签的影像于被检测物体表面上,保证安装于AGV小车上的单目摄像头可以完整的拍摄到AprilTag影像。
该步骤2具体包括以下分步骤:
步骤2.1、对图像进行畸变矫正;
步骤2.2、对图像进行核滤波,其中核矩阵设为
步骤2.3、对图象进行灰度二值化,图像部分的全部像素变为1白,将在阈值外的部分全部像素变为0黑。
步骤3、摄像头采集到AprilTag标签影像后,对其进行清晰化处理。
步骤4、自动进入图像处理模块中预先写好的AprilTag算法程序,计算出我们所需的物体旋转角度与位移信息。
步骤5、图像处理模块与中控模块通过串口通信协议完成上述信息的传递。
本发明能够应用在AGV小车上,如图3至图5所示,通过该基于结构光与AprilTag标签的位姿识别方法在AGV小车上的具体应用步骤如下:
步骤1、如图3所示,安装于AGV小车上的投影装置投射出AprilTag标签的影像于被检测物体表面上,保证安装于AGV小车上的单目摄像头可以完整的拍摄到AprilTag影像,投影装置结构原理示意图如图2所示;
步骤2、结构光原理如图5所示,摄像头采集到影像后进入图3所使程序对图像进行清晰化处理;
步骤3、结构光原理如图5所示,摄像头采集到影像后自动进入图像处理模块中预先写好的AprilTag算法程序,计算出我们所需的物体旋转角度与位移信息;
步骤4、图像处理模块与中控模块通过串口通信协议完成上述信息的传递。
- 一种基于结构光与AprilTag的位姿识别方法及系统
- 基于立体视觉和结构光视觉的大型工件位姿测量系统、方法