测距装置
文献发布时间:2023-06-19 09:54:18
相关申请的交叉引用
本申请主张基于2018年6月8日向日本专利厅申请的日本专利申请第2018-110325号的优先权,并通过参照在本国际申请中引用日本专利申请第2018-110325号的全部内容。
技术领域
本发明涉及一种通过计测从射出测距用的光到射出的光碰到物体而反射回来为止的时间来测定到物体的距离的测距装置。
背景技术
在这种测距装置中具备光检测器,以检测从物体反射回来的光。另外,作为光检测器,如专利文献1所记载的那样,公知有构成为使雪崩光电二极管(以下,APD)在盖革模式下进行动作来进行光检测的光检测器。
在盖革模式下进行动作的APD被称为SPAD,通过施加比击穿电压高的电压作为反向偏压来进行动作。此外,SPAD是“Single Photon Avalanche Diode”的省略。
由于若光子入射并产生响应,则SPAD击穿,因此在具备SPAD的光检测器中设置有用于在响应后对SPAD进行再充电的猝熄电阻。
猝熄电阻由电阻体或者MOSFET等半导体元件构成,通过因SPAD击穿而流过的电流输出检测信号,由于因该电流而产生的电压下降,使SPAD的响应停止,使电荷再充电到SPAD。
另外,SPAD存在若如上述那样被再充电而能够进行光检测,则由于陷入结晶缺陷等的载流子,而产生不依赖光的入射的伪响应的情况,因此需要在响应后,设定一定的不敏感时间(以下,称为空载时间)。
然而,在将这种光检测器利用于测距装置的情况下,存在空载时间成为距离测定的响应性降低的原因,有时对车载系统带来影响。
因此,如专利文献2所记载的那样提出:在测距装置中设置由SPAD构成的多个光检测器,在测距时,在每个规定时间,对检测到光的光检测器的个数计数,并在该个数为规定的阈值以上时,判断为反射光入射。
专利文献1:日本特开2017-75906号公报
专利文献2:日本专利第5644294号公报
在上述提出的测距装置中,在多个光检测器随机地响应的情况下,由于在规定时间内同时响应的光检测器的个数较少,因此能够通过判断同时响应的光检测器的个数是否是阈值以上来检测来自物体的反射光的入射。
然而,例如,如果在光入射的状态下,通过使能信号等而多个光检测器能够同时响应,则多个光检测器同时响应。另外,在为了距离测定而射出的光作为杂波入射到光检测器的情况下,多个光检测器也有时会同时响应。
而且,若像这样多个光检测器同时响应,则在空载时间期间中不能够响应,所以在空载时间后多个光检测器再次能够同时响应,导致响应的光检测器的个数增加。
因此,该情况下,响应的光检测器的个数将再充电所需要的时间作为1周期而周期性地变动。而且,由于在该变动期间中,能够响应的光检测器和不能够响应的光检测器混在一起,所以接下来同时响应的光检测器的个数减少,最终变动收敛。
因此,即使由于光检测器起动时的干扰光、杂波,同时响应的光检测器的个数发生变动,多个光检测器的光的检测灵敏度变得不均匀,最终同时响应的光检测器的个数也收敛到阈值以下,检测灵敏度稳定。
而且,若同时响应的光检测器的个数收敛到阈值以下,则由于来自物体的反射光入射,所以响应的光检测器的个数增加,因此能够通过计测从射出光到反射光入射为止的时间,来实施距离测定。
然而,发明人的详细研究的结果是发现了如下的课题:在同时产生由杂波引起的检测灵敏度的不均匀、和由干扰光引起的检测灵敏度的不均匀的条件下,从射出测距用的光到检测灵敏度稳定为止的时间变长。因此,在上述提出的测距装置中,有时不能够测定到位于测距装置的附近的物体的距离。
发明内容
本公开的一个方面期望在具备由SPAD构成的多个光检测器的测距装置中,能够抑制在测距开始后,多个光检测器的光的检测灵敏度因干扰光与杂波而变得不均匀的期间变长。
本公开的一个方面的测距装置具备:构成为射出测距用的光的照射部、多个光检测器、时间计测部、定时控制部以及定时指示部。
多个光检测器分别构成为,具备SPAD,并通过SPAD检测从照射部射出并碰到物体而反射回来的反射光,其中,该SPAD是能够在盖革模式下进行动作的雪崩光电二极管。
另外,时间计测部构成为,计测从照射部射出测距用的光起到多个光检测器中的规定个数以上的光检测器检测到光为止的时间。
另外,定时控制部构成为,按照来自外部的测距指令,使光从照射部射出,并且使构成多个光检测器的各SPAD在盖革模式下进行动作,来使由时间计测部进行的时间测定实施。
因此,定时控制部能够通过使时间计测部计测从照射部射出测距用的光到该光碰到物体并反射而被规定个数以上的光检测器检测为止的时间,来测定到物体的距离。
然而,在定时控制部使光从照射部射出时,在到该光从测距装置向周围放射为止期间,一部分的光在测距装置内部反射,而作为杂波入射到多个光检测器,各光检测器有时会同时响应。
另外,当定时控制部使多个光检测器的SPAD在盖革模式下进行动作时,各SPAD能够检测光,因此在该动作开始时,周围的干扰光的强度较高的情况下,多个光检测器有时因干扰光而同时响应。
因此,在定时控制部使测距用的光从照射部射出,并使由时间计测部进行的测距动作开始时,多个光检测器因杂波或者干扰光而同时响应,会导致多个光检测器的光的检测灵敏度变得不均匀。
而且,特别是,在同时产生由杂波引起的检测灵敏度的不均匀、和由干扰光引起的检测灵敏度的不均匀的情况下,多个光检测器的光的检测灵敏度稳定所需的时间变长,不能够正常地实施近距离下的距离测定。
与此相对,定时指示部构成为,分别设定定时控制部按照测距指令使光从照射部射出的射出定时、以及使各SPAD在盖革模式下进行动作的动作开始定时。
因此,根据本公开的测距装置,能够通过定时指示部调整从照射部的射出定时、和多个光检测器的动作开始定时。因而,缩短从照射部射出测距用的光之后,多个光检测器的光的检测灵敏度变得不均匀的期间,由此能够抑制近距离下的测距精度降低。
附图说明
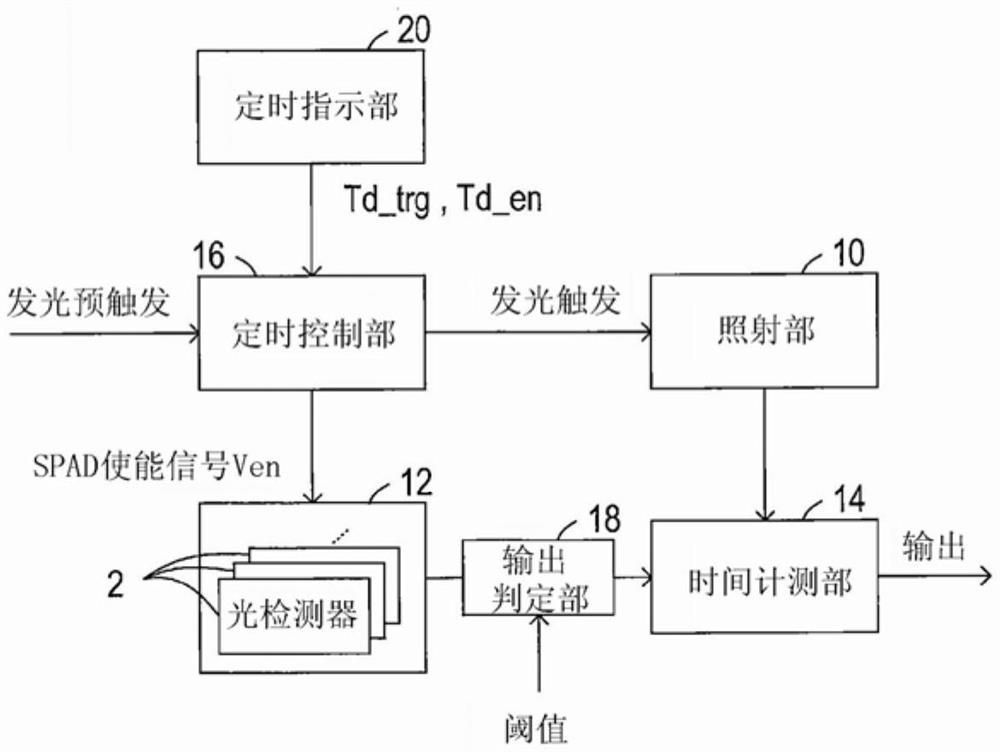
图1是表示第一实施方式的测距装置整体的结构的框图。
图2是表示光检测器的结构的电路图,图2A是表示光检测器的一个例子的电路图,图2B是表示光检测器的其它结构例的电路图。
图3是表示干扰光较强的情况下的发光触发以及SPAD使能信号的输出定时的设定例的时序图。
图4是表示干扰光较弱的情况下的发光触发以及SPAD使能信号的输出定时的设定例的时序图。
图5是表示在干扰光较强的情况下设定输出定时时的变形例的时序图。
图6是表示在干扰光较弱的情况下设定输出定时时的变形例的时序图。
图7是表示未产生杂波的情况下的发光触发以及SPAD使能信号的输出定时的设定例的时序图。
图8是表示第二实施方式的测距装置整体的结构的框图。
图9是表示由第二实施方式的定时指示部执行的定时设定处理的流程图。
图10是对基于图9的定时设定处理的发光触发以及SPAD使能信号的输出定时的设定顺序进行说明的时序图。
图11是表示第三实施方式的测距装置整体的结构的框图。
图12是表示由第三实施方式的定时指示部执行的定时设定处理的流程图。
具体实施方式
以下,与附图一起对本发明的实施方式进行说明。
[第一实施方式]
本实施方式的测距装置例如搭载在车辆上,用于测定到车辆周围的障碍物的距离,如图1所示,具备照射部10、具备多个光检测器2的检测部12、时间计测部14以及定时控制部16。
照射部10用于朝车辆外部射出测距用的光,并作为发光元件,例如由具备产生激光的发光二极管的电路构成。而且,照射部10通过从定时控制部16输入的发光触发使发光二极管发光,经由透镜等规定的光学系统向规定方向射出作为测距用的光的激光。
检测部12用于检测从照射部10射出并碰到物体而反射回来的光,通过将多个光检测器2在纵横方向上配置为格子状,从而构成为所谓受光阵列。
如图2A或者图2B所示,多个光检测器2分别具备SPAD4、猝熄电阻6以及脉冲输出部8。
SPAD4是能够在盖革模式下进行动作的APD,猝熄电阻6与至SPAD4的通电路径串联连接。
猝熄电阻6是在光子入射到SPAD4,SPAD4击穿时,由于流过SPAD4的电流,产生电压下降而使SPAD4的盖革放电停止的元件,在本实施方式中,由MOSFET构成。
因此,在本实施方式中,通过对构成猝熄电阻6的MOSFET施加规定的栅极电压来使MOSFET导通,通过该导通电阻对SPAD4施加反向偏压V
另外,通过停止栅极电压的施加而使MOSFET截止,能够切断通向SPAD4的通电路径,使SPAD4的动作停止。
此外,对MOSFET的栅极施加从定时控制部16输入到检测部12的使能信号Ven,若使能信号Ven成为高电平,则MOSFET成为导通状态,SPAD4成为能够响应光子的入射的状态。
另外,猝熄电阻6与SPAD4之间的连接点连接于脉冲输出部8。脉冲输出部8用于根据连接点的电位来检测SPAD4因光子的入射而击穿,若SPAD4击穿且连接点的电位变化,则输出恒定脉冲宽度的数字脉冲作为检测信号Vo。
此外,在光检测器2中,SPAD4可以如图2A所示那样阴极连接于正的电源线,阳极经由由n沟道MOSFET构成的猝熄电阻6接地于地线。
另外,也可以如图2B所示那样SPAD4的阴极连接于由p沟道MOSFET构成的猝熄电阻6,并按照这些串联电路的两端中的猝熄电阻6侧成为正电位,SPAD4侧成为负电位的方式施加直流电压。
而且,在图2A、图2B所示的任一光检测器2中,都能够通过向构成猝熄电阻6的MOSFET输入使能信号Ven(A)或者Ven(B),来对SPAD4施加反向偏压V
接下来,时间计测部14计测从照射部10射出测距用的光到该光被检测部12检测到为止的时间,并将该计测结果作为表示从本车辆到周围的物体的距离的信息输出至进行车辆的行驶辅助的车载装置。即,时间计测部14例如由包含计时电路等的电路构成,以便像这样进行动作。
另外,在构成检测部12的多个光检测器2中的规定个数以上的光检测器2检测到测距用的光时,时间计测部14判断为来自物体的反射光入射到检测部12。
因此,在检测部12与时间计测部14之间设置有输出判定部18,该输出判定部18将从构成检测部12的光检测器2大致同时输出的检测信号Vo的个数相加,并判断该加法结果是否是预先设定的阈值以上。此外,输出判定部18例如由具备加法电路、比较电路等的电路构成。
而且,时间计测部14基于来自输出判定部18的输出,判断为来自物体的反射光入射到检测部12,并输出从照射部10射出测距用的光起的经过时间作为表示到车辆周围的物体的距离的信息。
接下来,定时控制部16由控制电路构成,当从外部输入成为测距指令的发光预触发时,该控制电路使光从照射部10射出,并且向检测部12输出使能信号Ven,从而使由时间计测部14进行的距离测定开始。
如图3~图7中例示的那样,当从外部输入发光预触发时,之后,在经过了预先设定的发光待机时间Td_trg的时刻,定时控制部16向照射部10输出发光触发,以使照射部10发光。
另外,当从外部输入发光预触发时,之后,在经过了预先设定的检测待机时间Td_en的时刻,定时控制部16通过向检测部12输出使能信号Ven,来使多个光检测器2的光检测动作开始。
然而,当照射部10的射出定时以及多个光检测器2的动作开始定时为恒定时,则根据测距装置相对于车辆的设置状态、车辆周围的环境状态,从使光从照射部10射出到能够进行距离测定为止的时间有时变长。
因此,在本实施方式的测距装置中,构成为,能够分别设定变更定时控制部16从被输入发光预触发到输出发光触发以及使能信号Ven为止的待机时间Td_trg以及Td_en。
另外,在本实施方式的测距装置中设置有定时指示部20,该定时指示部20用于利用手动操作或者设定用设备来从外部指示定时控制部16中的待机时间Td_trg以及Td_en。
因此,在入射检测部12的干扰光较强的情况下,例如,如图3所示,能够按照在发光预触发的输入后,且在向检测部12输出使能信号Ven后,向照射部10输出发光触发的方式设定待机时间Td_trg以及Td_en。
另外,在入射检测部12的干扰光较弱的情况下,例如,如图4所示,能够按照在发光预触发的输入后,且在向照射部10输出发光触发后,向检测部12输出使能信号Ven的方式设定待机时间Td_trg以及Td_en。
即,当在干扰光较强的情况下,向检测部12输出使能信号Ven以使多个光检测器2同时动作时,如图3所示,各光检测器2的SPAD4大致同时响应,从检测部12输出的检测信号Vo的个数Pen变得非常多。
在像这样多个光检测器2大致同时响应的情况下,由于各SPAD4经由猝熄电阻6被再充电,所以在再充电后同时响应的光检测器2的个数也增加。
因此,同时响应的SPAD4的个数将各SPAD4的再充电所需的时间作为1个周期而周期性地变动,检测部12中的光的检测灵敏度变得不均匀。
另外,该情况下,同时响应的SPAD4的个数逐渐减少,但到该变动收敛且检测部12中的光的检测灵敏度稳定为止,来自物体的反射光的检测精度降低。
因此,在干扰光较强的情况下,通过使发光待机时间Td_trg比检测待机时间Td_en长,从而在检测部12的动作开始后,在因干扰光而响应的SPAD4的个数减少之后,使光从照射部10射出。
另外,若使光从照射部10射出,则该光作为杂波入射到检测部12,响应的光检测器2的个数Ptrg增加,检测部12的灵敏度会变得不均匀。
因此,在本实施方式中,如图3所示,按照因杂波而检测部12的灵敏度变得不均匀的期间与因干扰光而检测部12的灵敏度变得不均匀的期间重复的方式设定发光待机时间Td_trg。
因此,能够通过响应干扰光而变动的光检测器2的个数来抵消因杂波而响应的光检测器2的个数,由此缩短从使光从照射部10射出到检测部12的检测灵敏度稳定并能够实施准确的距离测定为止的时间。
此外,在干扰光较强的情况下,如图5所示,可以按照在向检测部12输出使能信号Ven后,在通过干扰光而检测部12的灵敏度稳定之后,向照射部10输出发光触发的方式设定发光待机时间Td_trg。
另一方面,在干扰光较弱的情况下,如图4所示,即使向检测部12输出使能信号Ven来使多个光检测器2动作,因干扰光而响应的光检测器2的个数Pen与干扰光较强的情况相比也较少。
因此,在干扰光较弱的情况下,在向检测部12输出使能信号Ven前,向照射部10输出发光触发,以使光从照射部10射出。
当因来自照射部10的光的射出而产生杂波时,因杂波而检测部12的灵敏度变得不均匀,但在该期间中,通过向检测部12输出使能信号Ven来使多个光检测器2动作,从而与由干扰光引起的灵敏度不均匀期间重复。
其结果是,能够缩短检测部12在动作开始后,因干扰光而变得灵敏度不均匀的期间。
此外,在干扰光较弱的情况下,如图6所示,也可以在从向照射部10输出发光触发来使光从照射部10射出之后,在因杂波而产生的检测部12的灵敏度不均匀收敛后,向检测部12输出使能信号Ven。
另外,根据测距装置向车辆的设置状态,有时未产生杂波。在这样的情况下,如图7所示,也可以按照在向检测部12输出使能信号Ven后,在通过干扰光而检测部12的灵敏度稳定之后,向照射部10输出发光触发的方式设定检测待机时间Td_en以及发光待机时间Td_trg。
如以上说明的那样,在本实施方式的测距装置中,设为能够设定变更在发光预触发的输入后,到向照射部10输出发光触发为止的发光待机时间Td_trg、和到向检测部12输出使能信号Ven为止的检测待机时间Td_en。
因此,如图3~图7所示,能够根据干扰光的强度、有无产生杂波等来设定照射部10的射出定时以及检测部12的动作开始定时。
因此,根据本实施方式的测距装置,能够缩短从使光从照射部10射出到检测部12的灵敏度稳定并能够实施准确的距离测定为止的时间,进而能够扩大测距装置能够进行距离测定的范围。
[第二实施方式]
在第一实施方式中,设为能够经由定时指示部20设定定时控制部16在发光预触发的输入后,到输出发光触发为止的发光待机时间Td_trg、和到输出使能信号Ven为止的检测待机时间Td_en进行了说明。
与此相对,如图8所示,本实施方式的测距装置构成为,通过由微机等运算处理电路构成定时指示部20,从而定时指示部20自动地设定发光待机时间Td_trg以及检测待机时间Td_en。
即,在本实施方式中,输出判定部18具备:将从构成检测部12的光检测器2大致同时输出的检测信号Vo的个数相加的加法部18A;以及判断加法部18A的加法结果是否是阈值以上的比较部18B。
而且,在比较部18B中,当判断为加法结果为阈值以上时,则向时间计测部14输出检测信号。另外,加法部18A的加法结果作为大致同时响应的SPAD4的响应数,不仅被输出至比较部18B,还被输出至峰值检测部22。
峰值检测部22分别检测照射部10射出测距用的光之后因杂波而大致同时响应的SPAD4的个数Ptrg的最大值、以及通过使能信号Ven而使检测部12动作之后因干扰光而大致同时响应的SPAD4的个数Pen的最大值。
而且,由峰值检测部22检测到的由杂波引起的SPAD4的响应数Ptrg以及由干扰光引起的SPAD4的响应数Pen被输入至定时指示部20,定时指示部20基于该响应数Ptrg、Pen设定待机时间Td_trg、Td_en。
以下,使用图9以及图10,对为了像这样设定待机时间Td_trg、Td_en而由定时指示部20执行的定时设定处理进行说明。
如图9所示,在定时设定处理中,首先,在S110中,对设定次数计数器i设定初始值[1],在紧接着的S120中,对待机时间Td_trg(i)、Td_en(i)设定预先设定的初始值。
而且,在紧接着的S130中,定时控制部16将当前所设定的待机时间Td_trg(i)、Td_en(i)设定为在发光预触发的输入后到输出发光触发以及使能信号Ven为止的待机时间Td_trg、Td_en。
另外,在S130中,在设定待机时间后,经由峰值检测部22分别测定因杂波而大致同时响应的SPAD4的最大的响应数Ptrg(i)以及因干扰光而大致同时响应的SPAD4的最大的响应数Pen(i)。
接下来,在S140中,对在S130中测定出的响应数Ptrg(i)以及Pen(i)进行大小比较,在由杂波引起的响应数Ptrg(i)比由干扰光引起的响应数Pen(i)多的情况下,移至S150,否则移至S160。
在S150中,由于由杂波引起的响应数Ptrg(i)比由干扰光引起的响应数Pen(i)多,干扰光比杂波弱,所以按照发光待机时间Td_trg比检测待机时间Td_en短的方式设定下次的待机时间Td_trg(i+1)以及Td_en(i+1)。
具体而言,如图10中例示的那样,在由杂波引起的响应数Ptrg1比由干扰光引起的响应数Pen1多的情况下,按照下次的发光待机时间Td_trg2比检测待机时间Td_en2短的方式设定下次的待机时间Td_trg2以及Td_en2。
另外,在S150中,根据响应数Ptrg(i)、Pen(i)的差“Ptrg(i)-Pen(i)”,并按照该差越大则发光待机时间Td_trg与检测待机时间Td_en的时间差越大的方式设定下次的待机时间Td_trg(i+1)以及Td_en(i+1)。
另一方面,在S160中,由于由干扰光引起的响应数Pen(i)比由杂波引起的响应数Ptrg(i)多,干扰光比杂波强,所以按照检测待机时间Td_en比发光待机时间Td_trg短的方式设定下次的待机时间Td_trg(i+1)以及Td_en(i+1)。
另外,在S160中,根据响应数Ptrg(i)、Pen(i)的差“Pen(i)-Ptrg(i)”,并按照该差越大则发光待机时间Td_trg与检测待机时间Td_en的时间差越大的方式设定下次的待机时间Td_trg(i+1)以及Td_en(i+1)。
而且,若在S150或者S160中设定下次的发光待机时间Td_trg(i+1)以及检测待机时间Td_en(i+1)时,则移至S170,使设定次数计数器i自增1来更新设定次数计数器i的值,移至S130。
如以上说明那样,在本实施方式中,定时指示部20基于在测距动作时经由峰值检测部22检测到的由杂波引起的SPAD4的响应数Ptrg以及由干扰光引起的SPAD4的响应数Pen来设定下次的待机时间Td_trg、Td_en。
因此,如图3~图7中例示的那样,能够根据干扰光的强度、有无产生杂波等,自动地设定照射部10的射出定时以及检测部12的动作开始定时。
因此,在车辆的白天行驶时、夜间行驶时等,即使车辆行驶时的周围环境变化,也能够根据该变化适当地设定照射部10的射出定时以及检测部12的动作开始定时,由此能够提高本公开的测距装置的使用的便利性。
此外,能够根据在S130中测定的由杂波引起的SPAD4的响应数Ptrg以及由干扰光引起的SPAD4的响应数Pen,来推定由杂波或者干扰光引起的灵敏度不均匀收敛所需的时间。
因此,在由干扰光或者杂波引起的灵敏度不均匀收敛之后,输出发光触发或者使能信号时,可以在S150、S160中,根据在S130中检测到的响应数Ptrg或者Pen来推定收敛时间。这样,能够简单且适当地设定待机时间Td_trg、Td_en的时间间隔。
[第三实施方式]
在第二实施方式中,设置有峰值检测部22,以根据车辆周围的环境变化而自动地设定照射部10的射出定时以及检测部12的动作开始定时。
而且,在峰值检测部22中分别检测因杂波以及干扰光而大致同时响应的SPAD4的响应数Ptrg以及Pen的最大值,在定时指示部20中,基于其检测结果来设定待机时间Td_trg、Td_en。
与此相对,在本实施方式中,如图11所示,构成为,从车载装置30向定时指示部20输入车辆的当前位置、时刻、气象状态等本车辆信息。
而且,定时指示部20与第二实施方式同样地由微机等运算处理电路构成,基于从车载装置30输入的本车辆信息来设定定时控制部16中的发光待机时间Td_trg以及检测待机时间Td_en。
即,定时指示部20在每个规定时间执行图12所示的定时控制处理。
在该定时控制处理中,首先,在S210中,基于从车载装置30输入的本车辆信息来推定向检测部12入射的干扰光的光量。
而且,在紧接着的S220中,判断在S210中推定出的干扰光的光量是否是规定的阈值以上,即,干扰光是否较强,在干扰光较强的情况下,移至S230,在干扰光较弱的情况下,移至S240。
在S230中,如图3或者图5所示,按照定时控制部16在向检测部12输出使能信号Ven后,向照射部10输出发光触发的方式设定待机时间Td_trg以及Td_en,并暂时结束定时控制处理。
另外,在S240中,如图4或者图6所示,按照定时控制部16在向照射部10输出发光触发后,向检测部12输出使能信号Ven的方式设定待机时间Td_trg以及Td_en,并暂时结束定时控制处理。
因此,根据本实施方式的测距装置,即使车辆行驶时的周围环境变化,也能够根据干扰光的强度自动适当地设定照射部10的射出定时以及检测部12的动作开始定时。
以上,对本公开的实施方式进行了说明,但本公开并不限于上述的实施方式,能够进行各种变形来实施。
例如,在图11、图12所示的第三实施方式中,设为定时指示部20基于根据从车载装置30获得的本车辆信息所推定出的干扰光的光量来设定发光待机时间Td_trg以及检测待机时间Td_en进行了说明。
与此相对,在第三实施方式的测距装置中,定时指示部20也可以构成为,根据在照射部10发光后进行响应的SPAD4的个数来推定由杂波引起的光量,并基于与干扰光的光量的大小关系来设定待机时间Td_trg、Td_en。
另外,可以通过多个构成要素来实现上述实施方式中的一个构成要素具有的多个功能,或者通过多个构成要素来实现一个构成要素具有的一个功能。另外,也可以通过一个构成要素来实现多个构成要素具有的多个功能,或者通过一个构成要素来实现由多个构成要素实现的一个功能。另外,也可以省略上述实施方式的结构的一部分。另外,还可以对其它上述实施方式的结构附加或者置换上述实施方式的结构的至少一部分。
- 测距装置、测距方法、测距程序及测距系统以及拍摄装置
- 测距装置、测距方法、测距程序及测距系统以及拍摄装置