致动器控制装置和方法
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及触觉反馈系统,更具体地,涉及用于控制用于触觉反馈的致动器的装置和方法。
背景技术
触觉反馈(haptic feedback)系统被安装并使用在用于用户界面的各种装置中。例如,通过来自便携式装置的触摸屏、软键(softkey)、主页按钮(home button)和指纹识别传感器的振动来向用户提供触觉反馈。近来,在诸如汽车和家用电器的包括触摸屏的许多装置中也安装了振动反馈系统。
线性共振致动器(Linear Resonance Actuator:LRA)被用作在触觉反馈系统中生成振动的装置。线性共振致动器具有这样的特性,即,仅当以共振频率(f
线性共振致动器的共振频率可以随制造公差、安装条件、温度和老化而变化。另外,当在共振频率之外驱动时,振动力可能被减弱或者振动可能不发生。因此,为了在诸如警告(alert)振动的一般振动中以小的驱动时间获得最大加速度,必须在致动器的共振频率下操作。为此,必须实时校正致动器的共振频率,该共振频率可以根据制造公差、安装条件、温度和老化而变化。
另外,近年来,代替移除用于便携式装置的防水功能和屏幕扩展的物理按钮,使用触摸按钮,并且还使用振动反馈来实现像触摸按钮中的物理按钮那样的点击感觉。在这种情况下,在10ms至20ms的短驱动时间内以1G以上的加速度产生振动反馈,并且在致动器停止驱动之后,残余振动越小,则再现像按压物理按钮那样的点击感觉越多。
通常,为了减小致动器的残余振动,其检测反电动势(BEMF)信号的过零点和BEMF信号的幅度,并且自动地生成并控制制动信号,但是当驱动时间很短或者BEMF信号的幅度小时,难以生成能够减少致动器的残余振动的制动信号的有效波形。因此,需要一种有效的方法来使触觉反馈系统中的致动器的残余振动的幅度和残余振动时间最小化。
[现有技术文献]
专利文献
专利文献1:韩国注册专利公开号10-1799722
专利文献2:韩国注册专利公开号10-1703472
发明内容
技术问题
因此,本发明是根据上述必要性设计的发明,并且本发明的目的是提供一种用于线性共振致动器的控制装置和控制方法,其能够实时校正根据制造公差、安装条件、温度和老化而变化的致动器的共振频率,从而获得具有最佳功率效率的最大振动。
此外,本发明的另一目的是提供一种用于线性共振致动器的控制装置和控制方法,其能够跟踪根据共振频率产生各种感觉的振动的驱动信号波形。
本发明的又一目的是提供一种用于致动器的控制装置和控制方法,其能够控制致动器以获得如同即使操作了触摸按钮,也操作了物理按钮一样的点击感觉。
此外,本发明的另一目的是提供一种线性共振致动器的控制装置和控制方法,该控制装置和控制方法测量和校正当满足特定事件条件时根据制造公差、安装条件、温度和老化而变化的致动器的共振频率,从而以最佳功率效率连续地保持最大振动,并且,
本发明的另一个目的是根据装置的使用周期来校正致动器的共振频率,以连续地保持具有最佳功率效率的振动的最大幅值,但是特别地,本发明的目的在于提供一种用于通过改变内部时钟频率来校正致动器的共振频率的致动器的控制装置和控制方法。
技术方案
用于解决上述技术问题的根据本发明的实施例的致动器控制装置的特征在于包括:
共振频率校正单元,其向致动器驱动单元输出PWM脉冲,该PWM脉冲是根据以参考时钟频率振荡的时钟和用于驱动致动器的参考驱动信号波形数据的组合而生成的;以及
过零点检测单元,其用于根据所述致动器的驱动来检测BEMF信号的过零点,
其中,所述共振频率校正单元的特征在于
通过从所述过零点的检测周期计算所述致动器的所述共振频率来执行自动校正处理,以便重新改变并将用于跟随所计算的所述致动器的所述共振频率的时钟频率设置为所述参考时钟频率。
根据本发明的另一实施例的致动器控制装置的特征在于,还包括位于所述过零点检测单元的前端的BEMF放大单元,以放大BEMF信号。
同时,在每个上述致动器控制装置中,所述共振频率校正单元的特征在于包括:
计数器,其用于利用内部时钟对所述过零点的检测周期进行计数;
时钟频率控制单元,其用于根据所述计数器的计数值计算所述致动器的共振频率,计算用于跟随所计算的所述致动器的共振频率的时钟频率,将其改变并设置为新的参考时钟频率,并控制振荡器的输出时钟;
振荡器,其用于以由所述时钟频率控制单元的控制设置的时钟频率振荡;以及
PWM生成单元,其用于根据所述振荡器的时钟和从外部施加的驱动信号的波形数据的组合来生成PWM脉冲,
其中,所述时钟频率控制单元的特征在于,当满足预定事件条件时执行所述自动校正处理,并且
此外,所述时钟频率控制单元的特征在于:
当满足预定事件条件时,通过将具有比所述参考驱动信号波形数据相对更大的驱动电压和更短的驱动时间的用于校正的第一驱动信号波形数据、或者具有比所述参考驱动信号波形数据相对更小的驱动电压和更长的驱动时间的用于校正的第二驱动信号波形数据施加到所述PWM生成单元,来进行所述自动校正处理。
同时,根据本发明的实施例的致动器控制方法是用于以共振频率驱动构成触觉反馈系统的致动器的控制方法,其特征在于包括:
第一步骤,用于控制振荡器的输出,使得生成用于驱动所述致动器的驱动信号所需的时钟以参考时钟频率振荡;
第二步骤,用于根据所述致动器的驱动,从BEMF信号的周期计算所述致动器的所述共振频率;以及
第三步骤,用于通过计算用于跟随所计算的所述致动器的共振频率的时钟频率并将其重新改变和设置为所述参考时钟频率来控制所述振荡器的输出,并且
其特征在于,当装置通电时或以预定的校正周期或者当达到装置内部的设定温度时执行第二步骤和第三步骤,还包括改变驱动信号波形数据的步骤,以便生成具有比驱动信号相对更大的驱动电压和更短的驱动时间的用于校正的第一驱动信号、或具有比所述驱动信号相对更小的驱动电压和更长的驱动时间的用于校正的第二驱动信号。
本发明的有益效果
根据上述问题解决装置,本发明具有如下优点:当通过校正参考时钟频率来满足特定事件条件时,通过校正根据制造公差、安装条件、温度和老化而改变的致动器的共振频率,能够为触觉反馈系统提供具有最佳功率效率的最大振动。
此外,本发明利用初始驱动信号波形来驱动致动器,并且由于其以根据构成驱动信号的保护时间间隔中的BEMF信号的过零点的检测时间来校正下一周期的驱动时间间隔的长度的方式来跟踪致动器的共振频率,优点在于,通过实时地校正随制造公差、安装条件、温度和老化而变化的致动器的共振频率,能够以最佳功率效率获得最大振动。
另外,由于本发明在存储驱动信号波形数据之后调整并使用频率,因此可以通过以共振频率驱动各种波形来实现各种感觉的振动,并且还可以通过优化存储在存储器中的驱动信号波形数据来获得调整最大加速度和使致动器加速度的分散最小化的效果。
此外,在通过实验方法找到对于致动器优化的制动信号波形并将其存储在存储器中之后,然后通过在与残余振动干涉的方向上施加制动信号以与在致动器被驱动之后的间隔中检测到的过零点重合,存在的优点是,即使在驱动时间短或具有小尺寸的BEMF信号(如主页按钮)的波形的情况下,也可以稳定地去除残余振动。
附图说明
图1是根据本发明实施例的致动器控制装置的示例性框图。
图2是用于解释根据本发明实施例的致动器控制方法的流程图。
图3和图4是用于解释本发明实施例的驱动信号波形的示例性视图。
图5至图7是用于解释本发明的实施例的制动信号波形的示例性视图。
图8是根据本发明另一实施例的致动器控制装置的示例性框图。
图9是用于解释图8所示的致动器控制装置的控制操作的示例性控制流程图。
图10是用于进一步解释图8所示的致动器控制装置的操作的信号波形的示例性视图。
图11和图13是用于解释根据本发明实施例的共振频率测量过程的视图。
具体实施方式
以下,将参考附图详细描述本发明的优选实施方式。在描述本发明时,当确定诸如相关的已知功能或配置的详细描述可能不必要地模糊本发明的要点时,将省略其详细描述。例如,根据本发明的实施例的致动器控制装置可应用于触觉反馈系统,并且假定可以应用本发明的装置包括触敏表面或其他类型的界面以及致动器,并且假定在触摸表面上产生致动器的振动。
同时,在以下使用的术语中,术语“驱动波形”是指在构成驱动信号的驱动时间间隔期间施加到致动器的波形,并且可以以调整驱动时间间隔的长度意味着驱动波形的改变的方式来进行解释。
首先,图1是根据本发明实施例的致动器控制装置的示例性框图。
如图1所示,触觉反馈系统包括致动器和致动器驱动单元300,该致动器例如具有共振频率作为用于在触摸表面上产生振动的方式,致动器驱动单元300用于根据由共振频率校正单元100生成的驱动信号来驱动致动器,这将在后面描述。由于致动器驱动单元300包括公知的选通驱动器和H桥电路,因此将省略其详细描述。
参照图1,根据本发明的实施例的致动器控制装置包括:过零点检测单元200,用于根据致动器驱动来检测反电动势(以下称为BEMF)信号的过零点(以下称为ZCP);以及
共振频率校正单元100,用于生成并输出用于以共振频率驱动致动器的驱动信号。
如图3所示,共振频率校正单元100重复地生成和输出驱动信号,该驱动信号包括用于驱动致动器的驱动时间(DRIVE_TIME)间隔和用于检测致动器的BEMF信号的保护时间(GUARD_TIME)间隔,其中,驱动时间间隔的长度根据在保护时间间隔内检测到的BEMF信号的过零点(ZCP)的检测时间来校正的驱动信号。
这样的共振频率校正单元100可以被配置为包括:
存储器110,用于存储用于驱动致动器的驱动信号波形数据(其可被定义为参考或初始驱动信号波形);
数据校正单元120,其根据依据致动器驱动的BEMF信号的过零点(ZCP)的检测时间来调整驱动信号波形的数据的数量;以及
PWM产生单元140,其生成与输入的内部时钟(OSC)和数据数量被调整的驱动信号的波形数据相对应的PWM脉冲,并将其输出到致动器驱动单元300。
当然,存储器110和数据校正单元120可以被实现为一个处理器,并且这样的处理器还可以被实现为控制安装有触觉反馈系统的装置的整体操作的处理器。
如果在驱动信号的保护时间间隔中检测到的BEMF信号的过零点(ZCP)的检测时间早于预先存储的参考值的过零点检测时间,则可以用硬件以及软件逻辑实现的共振频率校正单元100缩短驱动时间间隔,并且如果上述检测时间落后于参考值的过零点检测时间,则共振频率校正单元100生成并输出具有延长的驱动时间间隔的驱动信号。
此外,为了消除致动器的残余振动,共振频率校正单元100与在驱动信号中包括的保护时间(GUARD TIME)间隔内检测到的BEMF信号的过零点(ZCP)同步地输出一个或更多个制动信号(BRAKE),并且还可以使制动信号具有不同的频率和大小。另外,共振频率校正单元100输出多个制动信号,但是也可以通过根据按比例缩小比率调整大小来重复输出多个制动信号中的一个制动信号的大小。
同时,根据本发明的实施例的致动器控制装置还可以包括位于过零点检测单元200的前端处的BEMF放大单元400,以放大用于检测ZCP检测单元中的过零点的精细尺寸的BEMF信号。
作为参考,为了准确地检测过零点,需要区分BEMF信号和噪声信号。为此,在ZCP检测单元200的前端处设置噪声带,以忽略小于特定大小的BEMF信号。换句话说,如果BEMF信号被放大并且配置了使用来自放大信号的低阈值电压和高阈值电压的两个比较器,则阈值带内的电压被视为噪声。
在下文中,将参照附图更详细地描述具有上述构造的致动器控制装置的操作。
图2是示出根据本发明实施例的致动器控制方法的流程图;图3和图4是用于解释本发明实施例的驱动信号波形的示例性图;图5至图7分别例示了用于解释本发明的实施例的制动信号波形。
在描述本发明的实施例之前,将概述本发明的技术特征。
首先,根据致动器的参考共振频率生成并输出用于驱动致动器的驱动信号。用于生成驱动信号波形的驱动信号波形数据被存储在存储器中并用于初始驱动。在初始驱动之后,暂停致动器的驱动(意味着保护时间间隔),并且检测BEMF信号的过零点(ZCP)和极性(方向信息),以测量实际共振周期和移动振动器的移动方向。当驱动下一个周期时,可以通过计算过零点(ZCP)检测时的期望值和测量值之间的偏差,以及通过增大或减小存储在存储器中的驱动信号的驱动波形,来校正构成驱动信号的驱动波形的频率。
以这种方式,如果驱动信号的波形与实际共振频率匹配并且所施加的电压的极性与振动器的运动方向匹配并且被驱动,则可以以最佳功率效率获得最大振动力。
图2中示出了体现上述技术特征的致动器控制方法。
参照图2,当共振频率校正单元100接收到致动器驱动命令时,利用预先存储在存储器110中的驱动信号波形数据来驱动致动器(步骤S10)。通常,在该致动器驱动步骤中确定振动器的运动方向。驱动信号波形数据包含关于输出信号的大小的信息,并且确定输出到致动器驱动单元300的PWM脉冲的占空比。
作为参考,驱动信号由用于向致动器施加电压的驱动时间(DRIVE_TIME)间隔和用于检测BEMF信号的保护时间(GUARD_TIME)间隔组成,如图3所示。
驱动时间(DRIVE_TIME)间隔包括预先存储在存储器110中的最小驱动时间(MIN_DRIVE_TIME:以驱动信号波形数据的形式存储)和其中驱动时间根据校正结果而改变的校正时间(COMP_TIME)间隔。
校正时间(COMP_TIME)间隔的初始值COMP_TIME(0)被设置为参考过零点(ZCP)检测时间(ZXD_TIME)并存储在存储器110中。
保护时间(GUARD_TIME)间隔再次由GND_TIME、NULL_TIME和ZXD_REAL组成。GND_TIME对于去除残余在致动器中的剩余能量是必要的,并且NULL_TIME是其中致动器的输出变为Hi-Z状态并且感测放大器和ZCP检测单元200处于待机状态以检测BEMF信号的时间。ZXD_REAL表示BEMF信号实际达到过零点的时间。
如果用于驱动致动器的驱动信号的波形具有如图3所示配置的时间间隔,
则第一驱动时间(DRIVE_TIME),DRIVE_TIME(0),是从致动器共振频率的半周期中排除初始保护时间(GUARD_TIME)的时间。
换句话说,
DRIVE_TIME(0)=(1/f
最小和最大DRIVE_TIME可定义如下。
MAX_DRIVE_TIME=DRIVE_TIME(0)+COMP_TIME(0)
MIN_DRIVE_TIME=DRIVE_TIME(0)-COMP_TIME(0)
COMP_TIME(0)=ZXD_TIME
在输出第一驱动信号之后,通过在DRIVE_TIME(0)处补偿参考ZXD_TIME和实际测量的ZXD_REAL之间的差来确定下一周期的驱动信号的DRIVE_TIME(1)。
DRIVE_TIME(1)=DRIVE_TIME(0)+[ZXD_REAL(0)-ZXD_TIME]
如果将上述解释定义为一般公式,则如下。
DRIVE_TIME(n+1)=DRIVE_TIME(n)+[ZXD_REAL(n)-ZXD_TIME]
DRIVE_TIME(1)=DRIVE_TIME(0)+[ZXD_REAL(0)-ZXD_TIME]
上面的描述以一般的术语定义如下。
DRIVE_TIME(n+1)=DRIVE_TIME(n)+[ZXD_REAL(n)-ZXD_TIME]
当参考上述内容时,如果驱动时间(DRIVE_TIME(n))间隔的长度(即,驱动波形的频率)通过检测由于致动器的驱动引起的BEMF信号的过零点的检测时间并将其用作要与预设的过零点检测时间进行比较的参考值,则可以以共振频率来驱动致动器。
因此,构成共振频率校正单元100的数据校正单元120生成存储在存储器110中的驱动信号波形数据,并将其输出到PWM生成单元140,并检查是否从ZCP检测单元200输入了指示过零点的检测的信号(步骤S20)。
当与存储在存储器110中的驱动信号波形数据相对应的PWM脉冲被施加到致动器驱动单元300时,作为致动器的振动器振动,并且通过致动器振动的BEMF信号被输入到BEMF放大单元400。
通过设置噪声频带,特定大小或更小的BEMF信号被忽略,并且特定大小或更大的BEMF信号被输入到ZCP检测单元200,从而,数据校正单元120可以检查在致动器驱动被临时停止的保护时间间隔中是否输入了指示过零点(ZCP)的检测的信号。
如果在步骤S20中检测到过零点(ZCP),则数据校正单元120检查过零点(ZCP)是否是Fast(步骤S30)。“过零点快”被定义为过零点(ZCP)出现在预设为参考值的过零点检测时间(ZXD_TIME)之前的情况。
根据该定义,在过零点(ZCP)快处“ZXD_REAL=0”和“COMP_TIME=-ZXD_TIME”,并且驱动信号的驱动时间间隔减小到MIN_DRIVE_TIME,并且以最大共振频率(共振频率)驱动。即,如果过零点(ZCP)是快,则数据校正单元120校正驱动时间间隔的长度,并且调整存储在存储器110中的驱动信号波形的数据数量,使得驱动时间的长度变为MIN_DRIVE_TIME(这可以被定义为最小驱动波形)(步骤S40)。
如果过零点(ZCP)为慢(步骤S50),则数据校正单元120以调整存储在存储器110中的驱动信号波形的数据数量的方式来校正驱动时间间隔的长度,使得驱动时间的长度变为MAX_DRIVE_TIME(这可以被定义为最大驱动波形)(步骤S60)。
作为参考,在本发明中,直到ZXD_TIME的两倍才出现过零点(ZCP)的情况被定义为“过零点(ZCP)慢”。即,ZXD_REAL=2*ZXD_TIME,并且驱动时间间隔增大到MAX_DRIVE_TIME,并且以最小共振频率驱动。因此,如上所述,数据校正单元120调整驱动信号波形的数据的数量,使得驱动时间的长度变为MAX_DRIVE_TIME。
同时,如果过零点(ZCP)既不是快也不是慢,则数据校正单元120根据过零点(ZCP)检测时间(计算ZXD_REAL-ZXD_TIME)来调整存储的驱动信号波形的数据的数量(步骤S70)。
如果致动器在异常条件下暂时在共振频率范围之外运作,或者如果在BEMF信号中发生异常,则期望以在设定的最小共振频率和最大共振频率之间的范围内振动的方式进行控制。
总之,数据校正单元120响应于致动器驱动命令输出存储在存储器110中的驱动信号波形,并设置输出方向。当接收到致动器驱动结束命令时,终止该命令,并且如果没有接收到致动器驱动结束命令,则检测BEMF信号的过零点(ZCP)。当过零点(ZCP)小于设定的噪声频带时,重复输出相同的驱动信号波形以驱动致动器或照原样终止致动器。如果当检测到过零点(ZCP)时过零点(ZCP)为快,则将存储在存储器110中的驱动信号波形的数据的数量调整为在相反方向上变为MIN_DRIVE_TIME,并且如果过零点(ZCP)为慢,则将驱动信号波形的数据的数量调整为在相反方向上变为MAX_DRIVE_TIME,并且如果在ZXD_TIME间隔内检测到ZCP,则计算ZXD_REAL和ZXD_TIME之间的差,并且相应地调整驱动信号波形中的数据数量。
根据上述实施例,本发明的致动器控制装置和控制方法最初用存储的驱动信号波形驱动致动器,但是因为其以根据构成驱动信号的保护时间间隔中的BEMF信号的过零点的检测时间来校正下一周期的驱动时间间隔的长度的方式来跟踪致动器的共振频率,优点在于,通过实时校正致动器的共振频率,可以以最佳功率效率获得最大振动,所述共振频率根据制造公差、安装条件、温度和老化而变化。
同时,在上述实施例中,已经描述了校正驱动信号的波形(即,用于跟踪致动器的共振频率的驱动时间间隔的长度)的方法,但是,如图4所示,可以通过固定驱动时间间隔并同步到过零点(ZCP)来跟踪共振频率。
此时,存储在存储器110中的驱动信号波形的数据(DRIVE_TIME)可以由以下方程式确定。
DRIVE_TIME<(1/f
同时,在通过固定驱动时间间隔的长度并同步到过零点(ZCP)来跟踪致动器的共振频率的情况下,其优点是不仅能够跟踪半周期方波,而且能够根据共振频率跟踪具有各种形状和大小的波形。在这种情况下,可以利用共振频率进行各种感觉的振动。
将进一步描述在上述致动器共振频率校正驱动步骤之后用于快速去除致动器的残余振动的致动器制动步骤。
首先,当数据校正单元120接收到致动器驱动停止命令时(步骤S80),如图5(集成制动波形的示例)所示,通过同步到在保护时间(GUARD_TIME)间隔期间检测到的BEMF信号的过零点(ZCP)来输出制动信号波形(BRAKE_TIME),以便在终止驱动信号波形(DRIVE_TIME)之后去除致动器的残余振动。制动信号的波形数据也可以存储在存储器110中并在存储器110中使用,并且如图所示,制动信号的波形具有在干扰致动器的振动的方向上的波形。
如上所述,通过与在保护时间(GUARD_TIME)间隔期间检测到的BEMF信号的过零点(ZCP)同步地控制要施加到致动器的制动信号的波形,可以快速停止致动器振动器的移动。
作为上述致动器制动步骤的另一实施方法,如图6(半周期制动波形的示例)所示,当具有不同频率和大小的制动信号(BRAKE0_TIME、BRAKE1_TIME、...)的波形数据存储在存储器110中并且与过零点(ZCP)同步时,可以以各种方式获得更快的致动器下降时间特性。
另外,为了防止致动器再次通过制动信号振动,如图7(半周期自动大小调整制动波形的示例)所示,以可以根据要重复输出的按比例缩小比率来调整多个制动信号中的一个制动信号的大小的方式来输出多个制动信号。在图7中,BRAKE1_TIME的大小被按比例缩小,并且可以根据致动器的下降时间特性来选择按比例缩小比率(例如,1.0、0.75、0.5、0.25等)。
根据如上所述的本发明的实施例、根据本发明的实施例的致动器控制装置和方法,由于在将驱动信号的波形数据存储在存储器110中之后调整和使用频率,因此可以以共振频率驱动各种波形以实现各种振动感觉,并且也可以通过优化存储在存储器110中的驱动信号的波形数据来获得调整最大加速度和使致动器加速度的分散最小化的效果。
另外,在通过实验方法找到对于致动器优化的制动信号的波形并将其存储在存储器110中之后,
其优点在于,即使对于驱动时间较短或主页按钮等BEMF信号的大小较小的波形,也可以根据在致动器被驱动之后的部分中检测到的过零点,通过在干扰残余振动的方向上施加制动信号,来稳定地去除残余振动。
在上述实施例中,已经描述了用于通过调整施加到PWM生成单元140的驱动信号波形的数据的数量(即,驱动信号波形数据)来校正致动器的共振频率的装置和方法,但是可以通过调整施加到PWM生成单元140的时钟频率来校正致动器的共振频率。将进一步描述本发明的另一实施例,但是关于与图1中已经描述的配置相同的配置的描述将被省略掉。
首先,图8是根据本发明另一实施例的致动器控制装置的示例性框图,图9是用于解释图8所示的致动器控制装置的控制操作的示例性控制流程图,图10是用于进一步解释图8所示的致动器控制装置的操作的信号波形的示例性视图,图11和图13是各自示出根据本发明的实施例的用于测量共振频率的过程的图。
图8是根据本发明另一实施例的致动器控制装置的示例性框图。
图9是用于解释图8所示的致动器控制装置的控制操作的示例性控制流程图。
图10是用于进一步解释图8所示的致动器控制装置的操作的信号波形的示例性视图。
图11和图13是用于解释根据本发明实施例的共振频率测量过程的视图。
如图8所示,根据本发明的另一实施例的致动器控制装置是用于控制构成触觉反馈系统的致动器的装置,包括:
共振频率校正单元500,其将根据在振荡器530中以参考时钟频率振荡的时钟和用于驱动致动器的参考驱动信号波形数据的组合而生成的PWM脉冲输出到致动器驱动单元;以及
过零点检测单元600,其用于根据致动器驱动来检测BEMF信号的过零点(ZCP),
其中,共振频率校正单元500的特征在于,执行自动校正处理,在该自动校正处理中,根据过零点(ZCP)检测周期来计算致动器的共振频率,以便将用于跟随计算出的当前共振频率的时钟频率重新改变并设置为参考时钟频率。
“参考时钟频率”和“参考驱动信号波形数据”将分别被定义为预先设置以在共振频率下驱动致动器的时钟频率和驱动信号波形数据。该参考时钟频率通过后述的自动校正处理而被重新变更和设定。自动校正处理被定义为用于校正致动器的共振频率的一系列处理。
如已经在图1中描述的,图8所示的致动器控制装置还可以包括BEMF放大单元800,用于通过位于过零点(ZCP)检测单元600的前端来放大BEMF信号。
同时,共振频率校正单元500包括:
计数器520,用于利用内部时钟对过零点(ZCP)检测周期进行计数;
时钟频率控制单元510,用于通过根据计数器520的计数值计算致动器的共振频率、计算跟随所计算的致动器的共振频率所需的时钟频率、并将其改变和设置为新的参考时钟频率,来控制振荡器530的输出时钟;
振荡器530,其用于以由时钟频率控制单元510的控制设置的时钟频率振荡;以及
PWM生成单元540,其根据振荡器530的时钟和从外部施加的驱动信号波形数据的组合来生成PWM脉冲。
“外部”可以是触觉反馈系统所应用到的装置的主处理器,时钟频率控制单元510还可以用作根据实现方法授权用于自动校正处理的第一驱动信号波形数据或第二驱动信号波形数据的主体。当然,当时钟频率控制单元510和计数器520被实现为一个处理器时,其可以作为图1中描述的驱动信号波形数据的协调主要代理来操作,其甚至可以被编程为作为改变和设置参考时钟频率的主要代理来操作,或者作为根据操作模式改变和设置参考时钟频率和驱动信号波形数据中的任何一个的主要代理来操作。
同时,当满足预定事件条件时,时钟频率控制单元510执行所定义的自动校正处理。预定事件条件是应用了触觉反馈系统的装置何时通电,或者当其达到考虑到指定的校正周期(由装置用户或制造商设置的周期)而设置的装置中的设置温度或者可能导致性能劣化的温度等时的少数示例。这仅是示例,并且用户、制造商等可以设置各种类型的事件条件。
作为另一变型实现方法,时钟频率控制单元510在满足预定事件条件时执行自动校正处理,但是也可以通过将具有比参考驱动信号波形数据相对更大的驱动电压和更短的驱动时间的用于校正的第一驱动信号波形数据(如图11中所示)、或者具有比参考驱动信号波形数据相对小的驱动电压和更长的驱动时间的用于校正的第二驱动信号波形数据(如图12所示)施加至脉宽调制生成单元540来执行相同的校准处理。
同时,如果根据本发明实施例的致动器控制装置的共振频率校正单元500通过简单地改变时钟频率来校正共振频率,则自动校正处理可能受到限制。为此,还可以包括装置处理器(主机),用于支持当满足预定事件条件时由共振频率校正单元500正常执行的自动校正处理,即,用于施加用于校正的第一或第二驱动信号波形数据。
在下文中,将参照图9更详细地描述包括上述配置的致动器控制装置的控制方法。
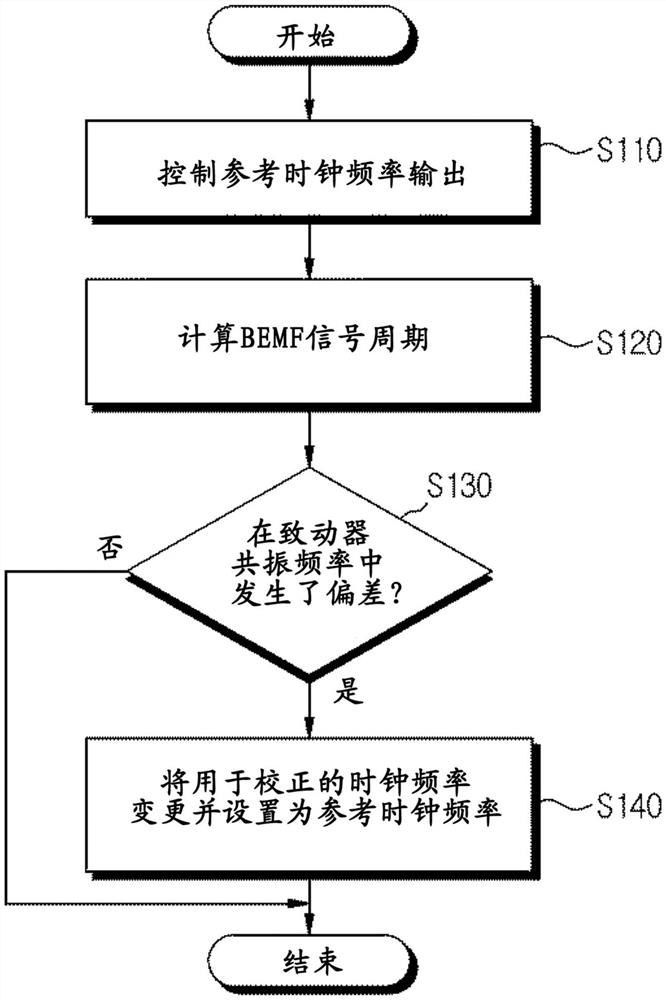
首先,当满足以上定义的预定事件条件时(也可以根据作为装置处理器的主机的命令来执行),时钟频率控制单元510控制振荡器530的输出(步骤S110),使得生成用于驱动致动器的驱动信号所需的时钟以参考时钟频率振荡。此时,作为装置处理器的主机将参考驱动信号波形数据施加到PWM生成单元540,使得以致动器的预设共振频率来驱动致动器。
这样,当驱动信号被施加到致动器时,相应地,生成BEMF信号并将其施加到ZCP检测单元600,使得检测到过零点(ZCP),并且将相应的脉冲施加到共振频率校正单元500。
因此,共振频率校正单元500中的计数器520利用内部时钟对BEMF信号的周期进行计数,并且该值被传送到时钟频率控制单元510,从而时钟频率控制单元510根据致动器驱动从BEMF信号周期计算致动器的当前共振频率(步骤S120)。
可以使用以下方程式来计算共振频率。在下面的方程式中,F
[方程式1]
F
[方程式2]
F
[方程式3]
F
如果基于上述方程式计算了致动器的当前共振频率,则时钟频率控制单元510进行到步骤S130以检查在计算出的致动器的共振频率和先前设置的共振频率之间是否出现偏差。如果作为检查结果在共振频率之间存在偏差,则致动器的当前共振频率已经由于诸如劣化的各种因素而改变,因此,计算跟随新计算的致动器的当前共振频率(是指偏差校正)的时钟频率,并且将其新改变并设置为参考时钟频率(步骤S140)。
以这种方式,通过将先前存储的参考时钟频率重新改变并设置为能够跟随当前测量的致动器的共振频率的时钟频率,致动器能够以最佳功率效率表现出最大振动特性。
因此,当通过校正参考时钟频率满足预定事件条件时,本发明校正根据制造公差、安装条件、温度和老化而改变的致动器的共振频率,因此,存在的优点在于,能够以最佳功率效率为触觉反馈系统提供最大的振动。
同时,作为本发明的另一实现方法,为了在必须在10ms至20ms内被驱动的短驱动条件下(诸如主页按钮的振动)获得足够的振动力和可测量的BEMF信号的幅度,优选地将如图11所示的驱动信号施加到致动器。即,为了校正当主页按钮振动事件发生时致动器的共振频率,期望时钟频率控制单元510或作为装置处理器的主机,通过将具有比参考驱动信号波形数据相对大的驱动电压和更短的驱动时间的第一驱动信号波形数据施加到PWM生成单元540来计算共振频率。
相反,如图12所示,可以将用于充分移动致动器的驱动时间和驱动电压(即,具有比参考驱动信号相对小的驱动电压和更长的驱动时间的用于校正的第二驱动信号波形数据)施加到PWM生成单元540以计算共振频率。
另外,如图13所示,即使当通知长时间振动但是以小振幅驱动时,由于在特定时间段之后可以获得足够的振动力和可测量的BEMF信号,并且还可以通过在通知振动周期的中间停止驱动信号来改变参考时钟频率以利用内部时钟测量BEMF信号周期,从而测量致动器的共振频率。
上面已经参考附图中所示的实施例进行了描述,但是这些实施例仅仅是示例性的,并且本领域的普通技术人员将理解,各种修改和其他等效实施例是可能的。
- 致动器的控制装置、致动器、阀驱动装置以及致动器的控制方法
- 致动器的控制装置、致动器、阀驱动装置以及致动器的控制方法