一种含有搜救机器人的船
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及船舶技术领域,具体为一种含有搜救机器人的船。
背景技术
随着社会的进步技术的变更,居住在海边的人们通过新型技术带领捕捞业不断发展扩大,当人们开船在海上作业时,由于有时会因为外力因素不慎掉落至海里,导致现在的船舶上会带有搜救机器人,以便于在遇到危险时,可进行救援,因此可知现在的一种含有搜救机器人的船基本满足人们需求,但是仍然存在一些问题。
现在的一种含有搜救机器人的船,由于搜救机器人底端未设置有固定机构,当船舶在海面进行行驶遇到风浪时,会令搜救机器人倾倒,从而不慎砸伤船员客人,导致出现安全问题。进一步导致搜救机器人自身出现损坏,大大降低了搜救机器人整体的实用性。
此外,现在的一种含有搜救机器人的船,在搜救机器人下海救援时,由于绳索长度不易进行限定,当绳索放得过长时,会导致绳索产生断裂的可能,从而令搜救失败,因此亟需一种含有搜救机器人的船来解决上述问题。
发明内容
本发明的目的在于提供一种含有搜救机器人的船,以解决上述背景技术中提出的搜救机器人底端未设置固定机构和绳索长度限定不便的问题。
为实现上述目的,本发明提供如下技术方案:一种含有搜救机器人的船,包括船舶主体、搜救机器人主体、绳索主体、支撑块主体和支撑柱主体,所述船舶主体顶端设置有搜救机器人主体,且搜救机器人主体外壁套设有搜救机器人主体,所述船舶主体顶端固定连接有支撑块主体,且支撑块主体顶端固定连接有支撑柱主体,所述支撑柱主体外壁缠绕有绳索主体,所述船舶主体顶端设置有固定机构,且固定机构包括固定块,所述船舶主体顶端固定连接有固定块,且固定块内部开设有第一腔室,所述第一腔室内部插设有延长块,且延长块顶端固定连接有搜救机器人主体,所述延长块内部插设有限位杆,且限位杆右侧通过转轴活动连接有调节杆,所述固定块外壁固定连接有侧杆,且侧杆右侧通过转轴活动连接有调节杆,所述调节杆右侧固定连接有压块,且调节杆左侧固定连接有调节柱,所述调节柱内部开设有第二腔室,所述固定块内部开设有第三腔室,且第三腔室内壁固定连接有第二弹簧,所述第二弹簧远离第三腔室内壁的一端固定连接于调节柱左侧,所述第二腔室内部贯穿有固定杆,且固定杆顶端固定连接于第三腔室内壁。
优选的,所述支撑块主体顶端设置有调节机构,且调节机构包括横板,所述支撑柱主体外壁固定连接有横板,且横板内部贯穿有拉杆,且拉杆底端插设于支撑块主体内部,所述拉杆顶端固定连接有拉板,且拉杆外壁缠绕有第三弹簧,所述第三弹簧顶端固定连接于拉板底端,且第三弹簧远离拉板的一端固定连接于横板外壁,所述拉板底端通过转轴活动连接有第三铰接杆,且第三铰接杆底端铰接有第四铰接杆,所述第四铰接杆底端通过转轴活动连接于横板外壁。
优选的,所述第一腔室内壁通过转轴活动连接有第一铰接杆,且第一铰接杆顶端铰接有第二铰接杆,所述第二铰接杆顶端通过转轴活动连接有底板,且底板顶端贴合有延长块。
优选的,所述第一腔室内壁固定连接有第一弹簧,且第一弹簧远离第一腔室内壁的一端固定连接于底板底端。
优选的,所述第一腔室内壁胶粘有第一密封块,且第一密封块左侧贴合有第二密封块,所述第二密封块左侧固定连接于延长块外壁。
优选的,所述压块右侧胶粘有软垫,且软垫为橡胶材质。
优选的,所述拉板顶端固定连接有固定把手,且固定把手形状设置为弧形。
与现有技术相比,本发明的有益效果是:
1、该含有搜救机器人的船设置有固定块、第一腔室、延长块、第一铰接杆、第二铰接杆、底板、第一弹簧、第一密封块、第二密封块、限位杆、调节杆、侧杆、压块、软垫、调节柱、第二腔室、第三腔室、第二弹簧和固定杆,按压软垫,通过调节杆挤压调节柱,使调节柱对第二弹簧产生挤压,令固定杆在第二腔室内部产生移动,调节杆以侧杆右侧转轴为中心带动限位杆左侧脱离第一腔室内部,接着延长块进入第一腔室内部,直至延长块底端对底板产生挤压,再松开软垫,使限位杆左侧进入延长块内部,解决了搜救机器人底端未设置固定机构的问题,通过设置该机构,令该机器人整体的稳定性提高,且有效地避免了搜救机器人倾倒,从而减少了安全事故的发生,大大提高了该装置整体的实用性;
2、该含有搜救机器人的船设置有横板、拉杆、拉板、第三弹簧、固定把手、第三铰接杆和第四铰接杆,拉动固定把手,通过拉板带动拉杆脱离绳索主体内部,使第三弹簧产生弹性形变,而第三铰接杆和第四铰接杆右侧相互远离,直至调节至适当长度后,再松开固定把手,解决了绳索长度限定不便的问题,通过设置该机构,令绳索对所需长度可进行相应的调节,大大节省了工作人员的工作时间,且进一步提高了该工作人员的工作效率。
附图说明
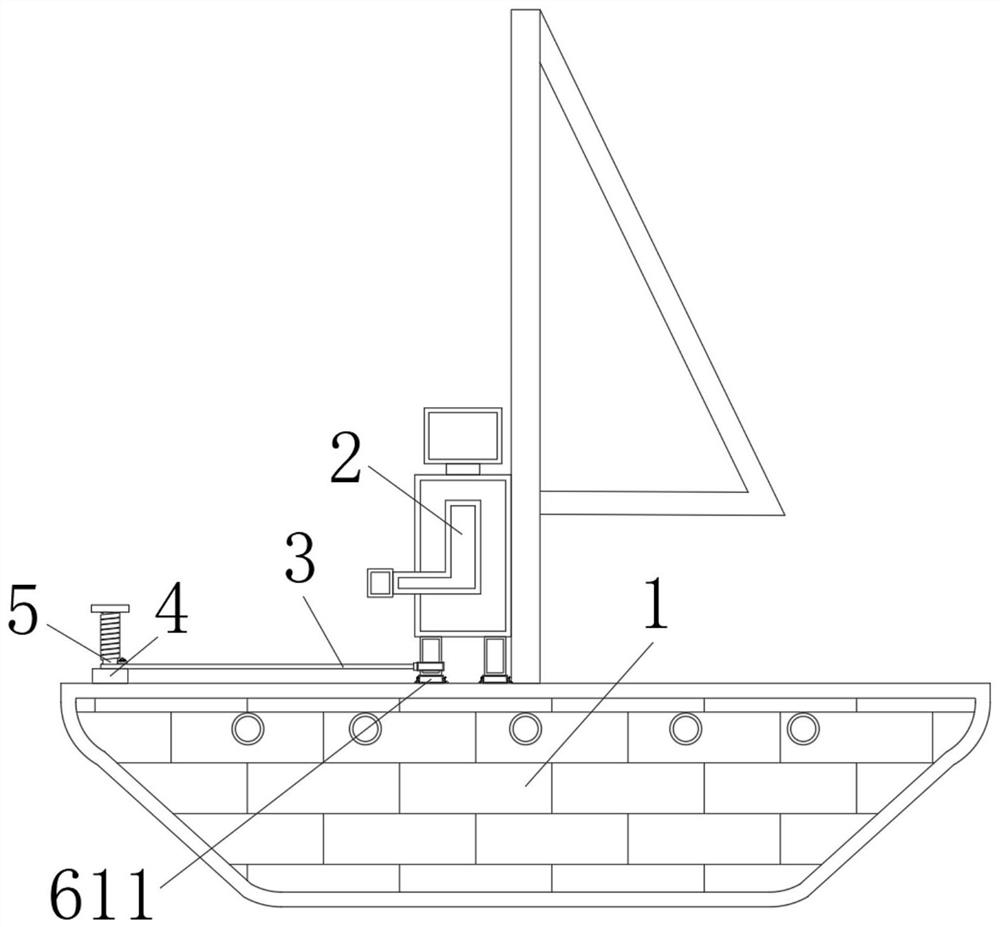
图1为本发明的正视示意图;
图2为本发明的固定机构正视剖面局部示意图;
图3为本发明的图2中A处结构放大示意图;
图4为本发明的调节机构正视局部剖面示意图;
图5为本发明的图4中B处结构放大示意图。
图中:1、船舶主体;2、搜救机器人主体;3、绳索主体;4、支撑块主体;5、支撑柱主体;611、固定块;612、第一腔室;613、延长块;614、第一铰接杆;615、第二铰接杆;616、底板;617、第一弹簧;618、第一密封块;619、第二密封块;620、限位杆;621、调节杆;622、侧杆;623、压块;624、软垫;625、调节柱;626、第二腔室;627、第三腔室;628、第二弹簧;629、固定杆;711、横板;712、拉杆;713、拉板;714、第三弹簧;715、固定把手;716、第三铰接杆;717、第四铰接杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-5,本发明提供的一种实施例:一种含有搜救机器人的船,包括船舶主体1、搜救机器人主体2、绳索主体3、支撑块主体4和支撑柱主体5,船舶主体1顶端设置有搜救机器人主体2,且搜救机器人主体2外壁套设有搜救机器人主体2,船舶主体1顶端固定连接有支撑块主体4,且支撑块主体4顶端固定连接有支撑柱主体5,支撑柱主体5外壁缠绕有绳索主体3,船舶主体1顶端设置有固定机构,且固定机构包括固定块611,船舶主体1顶端固定连接有固定块611,且固定块611内部开设有第一腔室612,第一腔室612内部插设有延长块613,且延长块613顶端固定连接有搜救机器人主体2,延长块613内部插设有限位杆620,且限位杆620右侧通过转轴活动连接有调节杆621,固定块611外壁固定连接有侧杆622,且侧杆622右侧通过转轴活动连接有调节杆621,调节杆621右侧固定连接有压块623,且调节杆621左侧固定连接有调节柱625,调节柱625内部开设有第二腔室626,固定块611内部开设有第三腔室627,且第三腔室627内壁固定连接有第二弹簧628,第二弹簧628远离第三腔室627内壁的一端固定连接于调节柱625左侧,第二腔室626内部贯穿有固定杆629,且固定杆629顶端固定连接于第三腔室627内壁。
支撑块主体4顶端设置有调节机构,且调节机构包括横板711,支撑柱主体5外壁固定连接有横板711,且横板711内部贯穿有拉杆712,且拉杆712底端插设于支撑块主体4内部,拉杆712顶端固定连接有拉板713,且拉杆712外壁缠绕有第三弹簧714,第三弹簧714顶端固定连接于拉板713底端,且第三弹簧714远离拉板713的一端固定连接于横板711外壁,拉板713底端通过转轴活动连接有第三铰接杆716,且第三铰接杆716底端铰接有第四铰接杆717,第四铰接杆717底端通过转轴活动连接于横板711外壁。
第一腔室612内壁通过转轴活动连接有第一铰接杆614,且第一铰接杆614顶端铰接有第二铰接杆615,第二铰接杆615顶端通过转轴活动连接有底板616,且底板616顶端贴合有延长块613,避免第一弹簧617过度拉升,对第一弹簧617的弹性起到保护作用。
第一腔室612内壁固定连接有第一弹簧617,且第一弹簧617远离第一腔室612内壁的一端固定连接于底板616底端,通过第一弹簧617自身的弹性作用,可令第一铰接杆614与第二铰接杆615再不受压力的情况下,快速复位。
第一腔室612内壁胶粘有第一密封块618,且第一密封块618左侧贴合有第二密封块619,第二密封块619左侧固定连接于延长块613外壁,增加密封性,避免异物进入。
压块623右侧胶粘有软垫624,且软垫624为橡胶材质,增加工作人员按压时的舒适度。
拉板713顶端固定连接有固定把手715,且固定把手715形状设置为弧形,便于工作人员继续拉取。
工作原理:需要对搜救机器人主体2进行固定时,先按压软垫624,通过调节杆621挤压调节柱625,使调节柱625对第二弹簧628产生挤压,使第二弹簧628发生弹性形变,令固定杆629在第二腔室626内部产生移动,调节杆621以侧杆622右侧转轴为中心带动限位杆620左侧脱离第一腔室612内部,接着延长块613进入第一腔室612内部,直至延长块613底端对底板616产生挤压,使第二密封块619与第一密封块618贴合,第一弹簧617产生弹性形变,第一铰接杆614与第二铰接杆615右侧相互靠近,再松开软垫624,使限位杆620左侧进入延长块613内部。
需要对绳索主体3进行固定时,先拉动固定把手715,通过拉板713带动拉杆712脱离绳索主体3内部,使第三弹簧714产生弹性形变,而第三铰接杆716和第四铰接杆717右侧相互远离,直至调节至适当长度后,再松开固定把手715。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 一种含有搜救机器人的船
- 一种含有海上巡查机器人的平台型船