混合动力车辆
文献发布时间:2023-06-19 09:57:26
技术领域
本公开涉及混合动力车辆,尤其涉及具备行星齿轮机构的混合动力车辆。
背景技术
在日本特开2013-230794号公报中公开了为了产生行驶的驱动力而除了内燃机之外还具备旋转电机的混合动力车辆。
发明内容
日本特开2013-230794号公报的混合动力系统是并联方式,能够将内燃机和旋转电机的驱动力合起来输出。但是,在日本特开2013-230794号公报的混合动力系统中,无法进行将内燃机的驱动力用于发电且输出基于发电产生的电力的仅旋转电机的驱动力的串联方式的动作。
若是具备行星齿轮机构的混合动力系统这样的分流方式的混合动力系统,则能够一边切换并联方式及串联方式这双方的方式一边进行动作。该行星齿轮机构由连接于内燃机的输出轴的第一要素(例如,齿轮架)、连接于旋转电机的旋转轴的第二要素(例如,太阳轮)及连接于向驱动轮传递动力的驱动轴的第三要素(例如,齿圈)构成,包括特定齿轮(例如小齿轮)。
但是,在具备行星齿轮机构的混合动力系统中,若从内燃机的转速高的状态起操作制动器踏板从而驱动轴被急减速,则旋转电机或特定齿轮可能会异常地成为高旋转。
本公开为了解决上述的课题而完成,其目的在于提供能够使得旋转电机或特定齿轮不超过上限转速的混合动力车辆。
本公开的混合动力车辆具备:内燃机;第一旋转电机;及行星齿轮机构,由连接于内燃机的输出轴的第一要素、连接于第一旋转电机的旋转轴的第二要素及连接于向驱动轮传递动力的驱动轴的第三要素构成,包括特定齿轮;及控制装置,控制内燃机及第一旋转电机。控制装置在预想为第一旋转电机或特定齿轮会超过上限转速的规定条件成立的情况下,执行以不超过上限转速的方式控制内燃机及第一旋转电机的特定控制。
根据这样的结构,在预想为第一旋转电机或特定齿轮会超过上限转速的情况下,能够使得不超过上限转速。其结果,能够提供能够使得第一旋转电机或特定齿轮不超过上限转速的混合动力车辆。
优选的是,作为特定控制,控制装置执行在规定条件成立的情况下与规定条件不成立的情况相比减小上限转速的控制。
根据这样的结构,在规定条件成立的情况下,减小上限转速来控制内燃机及第一旋转电机。其结果,能够使得第一旋转电机或特定齿轮难以超过上限转速。
优选的是,行星齿轮机构包括作为第一要素的齿轮架、作为第二要素的太阳轮、作为第三要素的齿圈及作为特定齿轮的多个小齿轮。
根据这样的结构,在具备包括齿轮架、太阳轮、齿圈及小齿轮的行星齿轮机构的混合动力车辆中,能够使得第一旋转电机或特定齿轮不超过上限转速。
优选的是,规定条件是内燃机的转速超过了与驱动轴的转速对应地预先确定的转速且驱动轴正在以规定加速度以上的加速度进行减速这一条件。
根据这样的结构,在内燃机的转速超过了与驱动轴的转速对应地预先确定的转速且驱动轴正在以规定加速度以上的加速度进行减速的情况下,能够使得第一旋转电机或特定齿轮不超过上限转速。
优选的是,混合动力车辆还具备使对驱动轴进行制动的制动装置动作的操作部。规定条件是内燃机的转速超过了与驱动轴的转速对应地预先确定的转速且操作部正在被操作这一条件。
根据这样的结构,在内燃机的转速超过了与驱动轴的转速对应地预先确定的转速且正在操作制动装置的操作部的情况下,能够使得第一旋转电机或特定齿轮不超过上限转速。
优选的是,作为特定控制,控制装置执行在规定条件成立的情况下与规定条件不成立的情况相比增大第一旋转电机的转速控制的反馈增益的控制。
根据这样的结构,在规定条件成立的情况下,增大第一旋转电机的转速控制的反馈增益来控制内燃机及第一旋转电机。其结果,能够使得第一旋转电机或特定齿轮难以超过上限转速。
优选的是,作为特定控制,控制装置执行停止向内燃机的燃料的供给的控制。
根据这样的结构,在规定条件成立的情况下,停止向内燃机的燃料的供给。其结果,能够使得第一旋转电机或特定齿轮难以超过上限转速。
优选的是,混合动力车辆还具备能够蓄积由第一旋转电机发电产生的电力并且能够将蓄积的电力向第一旋转电机供给的蓄电装置。控制装置以向蓄电装置充电的电力值不超过充电电力限制值为目标来控制内燃机及第一旋转电机,在向蓄电装置充电的电力值为从对充电电力限制值加上第一规定值而得到的值到对充电电力限制值加上比第一规定值大的第二规定值而得到的值为止的范围内时,以使内燃机以怠速转速运转的方式进行控制,在向蓄电装置充电的电力值超过对充电电力限制值加上第二规定值而得到的值时,停止向内燃机的燃料的供给。
根据这样的结构,能够使得向蓄电装置充电的电力值难以超过充电电力限制值。
优选的是,混合动力车辆还具备连接于驱动轴的第二旋转电机。控制装置在档位是倒车档时,以在预想为第一旋转电机或特定齿轮会超过上限转速的负车速下产生正车速侧的驱动转矩的方式控制内燃机、第一旋转电机及第二旋转电机。
根据这样的结构,能够使得在负车速下第一旋转电机或特定齿轮不超过上限转速。
本发明的上述及其他的目的、特征、方面及优点应会根据参照附图而理解的与本发明相关的以下的详细说明而变得明了。
附图说明
图1是示出按照本公开的实施方式的混合动力车辆的驱动系统的结构的一例的图。
图2是示出控制部的结构的一例的框图。
图3是示出发动机、第一MG及输出要素的转速及转矩的关系的第一列线图。
图4是示出发动机、第一MG及输出要素的转速及转矩的关系的第二列线图。
图5是示出发动机、第一MG及输出要素的转速及转矩的关系的第三列线图。
图6是示出决定发动机、第一MG及第二MG的动作点的基本计算处理的一例的流程图。
图7是示出齿圈转速与发动机转速的关系的图。
图8是示出不执行过旋转防止处理的情况下的发动机、第一MG及输出要素的转速的关系的列线图。
图9是示出过旋转防止处理的流程的流程图。
图10是示出执行了过旋转防止处理的情况下的发动机、第一MG及输出要素的转速的关系的列线图。
图11是示出变更前的后退时的驱动力映射的图。
图12是示出变更后的后退时的驱动力映射的图。
图13是示出Win超过时处理的流程的流程图。
图14是用于说明基于Win超过时处理的控制的图。
具体实施方式
以下,一边参照附图一边对本公开的实施方式进行详细说明。需要说明的是,对图中同一或相当部分标注同一标号,不反复进行其说明。
<关于混合动力车辆的驱动系统>
图1是示出按照本公开的实施方式的混合动力车辆(以下,简记为“车辆”)10的驱动系统的结构的一例的图。如图1所示,车辆10具备控制部11和成为行驶用的动力源的发动机13、第一电动发电机(以下,记为“第一MG”)14及第二电动发电机(以下,记为“第二MG”)15作为驱动系统。
第一MG14及第二MG15均具备通过接受驱动电力的供给而输出转矩的作为马达的功能和通过接受转矩的提供而产生发电电力的作为发电机的功能。作为第一MG14及第二MG15,使用交流旋转电机。交流旋转电机例如是具备埋设有永磁体的转子的永磁体型等的同步电动机或感应电动机。
第一MG14及第二MG15均经由PCU(Power Control Unit:功率控制单元)81而与蓄电池18电连接。PCU81包括与第一MG14授受电力的第一变换器16、与第二MG15授受电力的第二变换器17、蓄电池18及与第一变换器16及第二变换器17之间授受电力的转换器83。
转换器83例如构成为能够将蓄电池18的电力升压并向第一变换器16或第二变换器17供给。或者,转换器83构成为能够将从第一变换器16或第二变换器17供给的电力降压并向蓄电池18供给。
第一变换器16构成为能够将来自转换器83的直流电力变换为交流电力并向第一MG14供给。或者,第一变换器16构成为能够将来自第一MG14的交流电力变换为直流电力并向转换器83供给。
第二变换器17构成为能够将来自转换器83的直流电力变换为交流电力并向第二MG15供给。或者,第二变换器17构成为能够将来自第二MG15的交流电力变换为直流电力并向转换器83供给。
蓄电池18是构成为能够再充电的电力贮存要素。蓄电池18例如构成为包括由锂离子电池或镍氢电池等二次电池或者双电层电容器等蓄电元件。需要说明的是,锂离子二次电池是以锂为电荷载体的二次电池,除了电解质是液体的一般的锂离子二次电池之外,也能够包括使用了固体的电解质的所谓全固态电池。
蓄电池18能够将第一MG14发电产生的电力通过第一变换器16而接受并蓄积,能够将蓄积的电力通过第二变换器17而向第二MG15供给。另外,蓄电池18也能够将在车辆的减速时等第二MG15发电产生的电力通过第二变换器17而接受并蓄积,也能够将蓄积的电力在发动机13的启动时等通过第一变换器16而向第一MG14供给。
即,PCU81使用在第一MG14或第二MG15中发电产生的电力来对蓄电池18充电,或者使用蓄电池18的电力来驱动第一MG14或第二MG15。
对于蓄电池18,设定向蓄电池18充电的电力的容许值即充电电力限制值Win及从蓄电池18放电的电力的容许值即放电电力限制值Wout。Win及Wout随着蓄电池18的剩余充电量相对于满充电容量的比率即充电率(SOC:State of Charge)变低而变小,随着蓄电池18成为低温而变小,为了抑制由急速的充放电(高速率充放电)引起的蓄电池18的劣化即高速率劣化而被设得小。控制部11以使蓄电池18的充电电力及放电电力分别不超过Win及Wout的方式控制充放电。
发动机13及第一MG14连结于行星齿轮机构20。行星齿轮机构20将发动机13输出的驱动转矩向第一MG14和输出齿轮21分割而传递。行星齿轮机构20具有单小齿轮型的行星齿轮机构,与发动机13的输出轴22配置于同一轴线Cnt上。
行星齿轮机构20包括太阳轮S、与太阳轮S同轴地配置的齿圈R、与太阳轮S及齿圈R啮合的小齿轮P及将小齿轮P保持为能够自转及公转的齿轮架C。发动机13的输出轴22连结于齿轮架C。第一MG14的转子轴23连结于太阳轮S。齿圈R连结于输出齿轮21。
接受发动机13的输出转矩的传递的齿轮架C作为输入要素发挥功能,向输出齿轮21输出转矩的齿圈R作为输出要素发挥功能,与转子轴23连结的太阳轮S作为反作用力要素发挥功能。也就是说,行星齿轮机构20将发动机13的输出向第一MG14侧和输出齿轮21侧分割。第一MG14以输出与发动机13的输出转矩对应的转矩的方式被控制。
副轴25与轴线Cnt平行地配置。副轴25安装于与输出齿轮21啮合的从动齿轮26。另外,在副轴25安装有驱动齿轮27,该驱动齿轮27与作为最终减速机的差速齿轮28中的齿圈29啮合。而且,在从动齿轮26上啮合有安装于第二MG15的转子轴30的驱动齿轮31。因此,第二MG15的输出转矩在从动齿轮26处向从输出齿轮21输出的转矩叠加。这样合成后的转矩经由从差速齿轮28向左右延伸出的驱动轴32、33而向驱动轮24传递。通过向驱动轮24传递转矩,在车辆10产生驱动力。
<关于控制部的结构>
图2是示出控制部11的结构的一例的框图。如图2所示,控制部11具备HV(HybridVehicle:混合动力汽车)-ECU(Electronic ControlUnit:电子控制单元)62、MG-ECU63及发动机ECU64。
HV-ECU62是用于对发动机13、第一MG14及第二MG15进行协同控制的控制装置。MG-ECU63是用于控制PCU81的动作的控制装置。发动机ECU64是用于控制发动机13的动作的控制装置。
HV-ECU62、MG-ECU63及发动机ECU64均构成为具备进行与连接的各种传感器、其他ECU之间的信号的授受的输入输出装置、用于各种控制程序、映射等的存储的存储装置(包括ROM(Read OnlyMemory:只读存储器)、RAM(Random Access Memory:随机存取存储器)等)、执行控制程序的中央处理装置(CPU(Central ProcessingUnit:中央处理单元))及用于计时的计数器等。
在HV-ECU62上分别连接有车速传感器66、加速器开度传感器67、第一MG转速传感器68、第二MG转速传感器69、发动机转速传感器70、蓄电池监视单元73、第一MG温度传感器74、第二MG温度传感器75、第一INV温度传感器76、第二INV温度传感器77、档位传感器78及制动器踏板传感器71。
车速传感器66检测车辆10的速度(车速)。加速器开度传感器67检测加速器踏板的踩踏量(加速器开度)。第一MG转速传感器68检测第一MG14的转速。第二MG转速传感器69检测第二MG15的转速。发动机转速传感器70检测发动机13的输出轴22的转速(发动机转速)。第一MG温度传感器74检测第一MG14的内部温度(例如与线圈、磁铁相关联的温度)。第二MG温度传感器75检测第二MG15的内部温度(例如,与线圈、磁铁相关联的温度)。第一INV温度传感器76检测第一变换器16的温度(例如,与开关元件相关联的温度)。第二INV温度传感器77检测第二变换器17的温度(例如,与开关元件相关联的温度)。档位传感器78检测车辆10的换档杆的操作位置(档位),将其检测结果向HV-ECU62输出。制动器踏板传感器71检测车辆10的驾驶员对制动器踏板72的操作量,将其检测结果向HV-ECU62输出。各种传感器将表示检测结果的信号向HV-ECU62输出。
蓄电池监视单元73取得蓄电池18的SOC,将表示取得的SOC的信号向HV-ECU62输出。蓄电池监视单元73例如包括检测蓄电池18的电流、电压及温度的传感器。蓄电池监视单元73通过使用检测到的蓄电池18的电流、电压及温度计算SOC来取得SOC。需要说明的是,作为SOC的计算方法,例如能够采用基于电流值累计(库伦计数)的手法或基于开路电压(OCV:Open Circuit Voltage)的推定的手法等各种公知的手法。
<关于车辆的行驶控制>
具有以上这样的结构的车辆10能够设定或切换为以发动机13及第二MG15为动力源的混合动力(HV)行驶模式、使发动机13成为停止状态并且利用蓄积于蓄电池18的电力驱动第二MG15而行驶的电动(EV)行驶模式等行驶模式。各模式的设定、切换由HV-ECU62执行。HV-ECU62基于设定或切换的行驶模式来控制发动机13、第一MG14及第二MG15。
EV行驶模式例如是在低车速且要求驱动力小的低负荷的运转区域时选择的模式,是停止发动机13的运转且第二MG15输出驱动力的行驶模式。
HV行驶模式是在高车速且要求驱动力大的高负荷的运转区域时选择的模式,是输出将发动机13的驱动转矩与第二MG15的驱动转矩相加而得到的转矩的行驶模式。
在HV行驶模式下,在将从发动机13输出的驱动转矩向驱动轮24时,利用第一MG14使反作用力作用于行星齿轮机构20。因而,太阳轮S作为反作用力要素发挥功能。也就是说,为了使发动机转矩作用于驱动轮24,以使第一MG14输出相对于发动机转矩的反作用力转矩的方式进行控制。在该情况下,能够执行使第一MG14作为发电机发挥功能的再生控制。
以下,对车辆10的运转时的发动机13、第一MG14及第二MG15的协同控制进行说明。
HV-ECU62基于由加速器踏板的踩踏量决定的加速器开度等来计算要求驱动力。HV-ECU62基于计算出的要求驱动力和车速等来计算车辆10的要求行驶功率。HV-ECU62将对要求行驶功率加上蓄电池18的充放电要求功率而得到的值作为要求系统功率而计算。
HV-ECU62根据计算出的要求系统功率来判定是否要求发动机13的工作。HV-ECU62例如在要求系统功率超过阈值的情况下判定为要求发动机13的工作。在要求发动机13的工作的情况下,HV-ECU62将HV行驶模式设定为行驶模式。在不要求发动机13的工作的情况下,HV-ECU62将EV行驶模式设定为行驶模式。
在要求发动机13的工作的情况下(即,在设定HV行驶模式的情况下),HV-ECU62计算相对于发动机13的要求功率(以下,记为要求发动机功率)。HV-ECU62例如将要求系统功率计算为要求发动机功率。需要说明的是,例如在要求系统功率超过要求发动机功率的上限值的情况下,HV-ECU62将要求发动机功率的上限值计算为要求发动机功率。HV-ECU62将计算出的要求发动机功率作为发动机运转状态指令而向发动机ECU64输出。
发动机ECU64基于从HV-ECU62输入的发动机运转状态指令来对进气节气门49、火花塞45及VVT(Variable Valve Timing:可变气门正时)机构46等发动机13的各部分进行各种控制。
VVT机构46是能够根据来自发动机ECU64的指令而使发动机13的进气门及排气门的至少一方的开阀期间、开闭正时及提升量的至少1个根据发动机13的动作状况而变化的机构,在该实施方式中,能够至少使进气门的开闭正时变化。
另外,HV-ECU62使用计算出的要求发动机功率来设定由发动机转速和发动机转矩规定的坐标系中的发动机13的动作点。HV-ECU62例如在该坐标系中将与要求发动机功率等输出的等功率线和预先确定的动作线的交点设定为发动机13的动作点。
预先确定的动作线表示该坐标系中的相对于发动机转速的变化的发动机转矩的变化轨迹,例如,燃耗效率好的发动机转矩的变化轨迹通过实验等来适配、设定。
HV-ECU62将与设定的动作点对应的发动机转速设定为目标发动机转速。
当设定目标发动机转速后,HV-ECU62设定用于使当前的发动机转速成为目标发动机转速的第一MG14的转矩指令值。HV-ECU62例如通过基于当前的发动机转速与目标发动机转速的差量的反馈控制来设定第一MG14的转矩指令值。
HV-ECU62根据设定的第一MG14的转矩指令值来计算发动机转矩向驱动轮24的传递量,以满足要求驱动力的方式设定第二MG15的转矩指令值。HV-ECU62将设定的第一MG14及第二MG15的转矩指令值分别作为第一MG转矩指令及第二MG转矩指令而向MG-ECU63输出。
MG-ECU63基于从HV-ECU62输入的第一MG转矩指令及第二MG转矩指令来计算与使第一MG14及第二MG15产生的转矩对应的电流值及其频率,将包括计算出的电流值及其频率的信号向PCU81输出。
需要说明的是,在图2中,以分成HV-ECU62、MG-ECU63及发动机ECU64的结构为一例进行了说明,但也可以由将它们汇集后的1个ECU构成。
图3~图5分别是示出发动机13、第一MG14及输出要素的转速及转矩的关系的第一~第三列线图。图3是示出变更发动机13的动作点之前的各要素的转速及转矩的关系的列线图。图4是示出从图3所示的状态起使发动机13的转速Ne上升时的各要素的转速及转矩的关系的列线图。图5是示出从图3所示的状态起使发动机13的转矩Te上升时的各要素的转速及转矩的关系的列线图。
在图3~图5的各图中,输出要素是连结于副轴25(图1)的齿圈R。纵轴中的位置表示各要素(发动机13、第一MG14及第二MG15)的转速,纵轴的间隔表示行星齿轮机构20的齿轮比。“Te”表示发动机13的转矩,“Tg”表示第一MG14的转矩。“Tep”表示发动机13的直行转矩,“Tm1”表示将第二MG15的转矩Tm换算到输出要素上后的转矩。Tep与Tm1之和相当于向驱动轴(副轴25)输出的转矩。向上箭头表示正方向的转矩,向下箭头表示负方向的转矩,箭头的长度表示转矩的大小。
参照图3及图4,图4中的虚线示出了使转速Ne上升前的关系,相当于图3所示的线。发动机13的转矩Te与第一MG14的转矩Tg的关系由行星齿轮机构20的齿轮比唯一地决定,因此,通过以维持第一MG14的转矩Tg并使第一MG14的转速上升的方式控制第一MG14,能够维持驱动转矩并使发动机13的转速Ne上升。
另外,参照图3及图5,通过以使发动机13的输出(功率)上升的方式控制发动机13,能够使发动机13的转矩Te上升。此时,通过以使第一MG14的转速不上升的方式使第一MG14的转矩Tg上升,能够维持发动机13的转速Ne并使发动机13的转矩Te上升。需要说明的是,通过转矩Te上升,发动机直行转矩Tep增加,因此,通过以使转矩Tm1下降的方式控制第二MG15,能够维持驱动轴的转矩。
需要说明的是,若使发动机13的转矩Te上升,则第一MG14的转矩Tg上升,因此第一MG14的发电电力增加。此时,若蓄电池18的充电未被限制,则能够将增加的发电电力充入蓄电池18。
另一方面,虽然未特别图示,但通过以使发动机13的输出(功率)下降的方式控制发动机13,能够使发动机13的转矩Te下降。此时,通过以使第一MG14的转速不下降的方式使第一MG14的转矩Tg下降,能够维持发动机13的转速Ne并使发动机13的转矩Te下降。并且,在该情况下,由于第一MG14的转矩Tg下降,所以第一MG14的发电电力减小。此时,若蓄电池18的放电未被限制,则通过使蓄电池18的放电增加,能够弥补第一MG14的发电下降量。
<动作点的基本计算处理的说明>
图6是示出决定发动机13、第一MG14及第二MG15的动作点的基本计算处理的一例的流程图。该流程图所示的一系列处理在HV-ECU62中在每个规定周期中反复执行。
参照图6,HV-ECU62取得加速器开度、选择中的档位、车速等信息(步骤S10)。加速器开度由加速器开度传感器67检测。档位由档位传感器78检测。车速由车速传感器66检测。也可以取代车速而使用驱动轴、齿圈R的转速。
接着,HV-ECU62使用针对每个档位预先准备的表示要求驱动力、加速器开度及车速的关系的驱动力映射,根据在步骤S10中取得的信息来计算要求驱动力(转矩)(步骤S15)。然后,HV-ECU62对计算出的要求驱动力乘以车速,追加规定的损失功率来计算车辆的行驶功率(步骤S20)。
接着,HV-ECU62在存在蓄电池18的充放电要求(功率)的情况下,将对计算出的行驶功率加上充放电要求(将充电设为正值)而得到的值计算为系统功率(步骤S25)。需要说明的是,关于充放电要求,例如,蓄电池18的SOC越低,则设为越大的正值,在SOC高的情况下,能够设为负值。
接着,HV-ECU62根据计算出的系统功率及行驶功率来判断发动机13的运转/停止(步骤S30)。例如,在系统功率比第一阈值大的情况或行驶功率比第二阈值大的情况下,判断为使发动机13运转。
并且,若判断为使发动机13运转,则HV-ECU62执行步骤S35以后的处理(HV行驶模式)。需要说明的是,虽然未特别图示,但在判断了发动机13的停止时(EV行驶模式),基于要求驱动力来计算第二MG15的转矩Tm。
在发动机13的运转中(HV行驶模式中),HV-ECU62根据在步骤S25中计算出的系统功率来计算发动机13的功率Pe(步骤S35)。该功率Pe通过对系统功率进行各种修正、限制等来计算。这里计算出的发动机13的功率Pe作为发动机13的功率指令而向发动机ECU64输出。
接着,HV-ECU62计算发动机13的转速Ne(目标发动机转速)(步骤S40)。在该实施方式中,如上所述,以使发动机13的动作点处于推荐动作线上的方式计算转速Ne。具体而言,发动机13的动作点成为推荐动作线上的功率Pe与转速Ne的关系预先作为映射等而准备,使用该映射,根据在步骤S35中计算出的功率Pe来计算转速Ne。需要说明的是,若转速Ne被决定,则发动机13的转矩Te(目标发动机转矩)也被决定。由此,发动机13的动作点被决定。
接着,HV-ECU62计算第一MG14的转矩Tg(步骤S45)。能够根据发动机13的转速Ne来推定发动机13的转矩Te,由于转矩Te与转矩Tg的关系由行星齿轮机构20的齿轮比唯一地决定,所以能够根据转速Ne来计算转矩Tg。这里计算出的转矩Tg作为第一MG14的转矩指令而向MG-ECU63输出。
而且,HV-ECU62计算发动机直行转矩Tep(步骤S50)。由于发动机直行转矩Tep与转矩Te(或转矩Tg)的关系由行星齿轮机构20的齿轮比唯一地决定,所以能够根据计算出的转矩Te或转矩Tg来计算发动机直行转矩Tep。
并且,最后,HV-ECU62计算第二MG15的转矩Tm(步骤S50)。转矩Tm以能够实现在步骤S15中计算出的要求驱动力(转矩)的方式决定,能够通过从换算到输出轴上的要求驱动力减去发动机直行转矩Tep来计算。这里计算出的转矩Tm作为第二MG15的转矩指令而向MG-ECU63输出。
如以上这样,计算发动机13的动作点以及第一MG14及第二MG15的动作点。
[第一MG14或小齿轮P的过旋转的防止]
在如上所述的具备行星齿轮机构20的混合动力车辆的驱动系统中,若因从发动机13的转速高的状态起操作制动器踏板72而导致向驱动轮24传递动力的行星齿轮机构20的驱动轴即输出齿轮21被急减速,则第一MG14或小齿轮P可能会异常地成为高旋转。
于是,本公开的车辆10的HV-ECU62在预想为第一MG14或小齿轮P会超过上限转速的规定条件成立的情况下,以不超过上限转速的方式控制发动机13及第一MG14。由此,在预想为第一MG14或小齿轮P会超过上限转速的情况下,能够使得不超过上限转速。其结果,能够使得第一MG14或小齿轮P不超过上限转速。
以下,对该实施方式中的控制进行说明。图7是示出齿圈转速与发动机转速的关系的图。参照图7,齿圈转速是行星齿轮机构20的齿圈R的转速。发动机13的转速与行星齿轮机构20的齿轮架C的转速相等。
线L1是表示发动机13的设计上的上限转速的线。线L2是表示第一MG14成为设计上的上限转速的情况下的齿圈转速与发动机转速的关系的线。线L3是表示小齿轮P成为设计上的上限转速的情况下的齿圈转速与发动机转速的关系的线。线L4是表示第一MG14成为设计上的下限转速的情况下的齿圈转速与发动机转速的关系的线。线L5是表示小齿轮P成为设计上的下限转速的情况下的齿圈转速与发动机转速的关系的线。线L6是表示齿圈R的设计上的上限转速的线。
影线部表示过旋转注意区域。过旋转注意区域是在动作点包含于该区域时在齿圈R被急减速的情况下第一MG14或小齿轮P可能会成为过旋转的区域。线L7是表示过旋转注意区域的下限的线。例如,考虑在动作点P1的状态下通过操作制动器踏板72而齿圈R的转速被急减速,向动作点P2移动。在这样的情况下,动作点P2会超过线L2及线L3,因此第一MG14及小齿轮P的转速会超过上限转速。
图8是示出不执行过旋转防止处理的情况下的发动机13、第一MG14及输出要素(齿圈R)的转速的关系的列线图。参照图8,虚线表示齿圈R的转速的急减速前。实线表示齿圈R的转速的急减速后。若齿圈R的转速通过由制动器踏板72的操作等引起的急制动而急下降,则由于连接有齿轮架C的发动机13的惯性大,所以齿轮架C的转速难以立即变化,连接有第一MG14的太阳轮S的转速急剧上升。
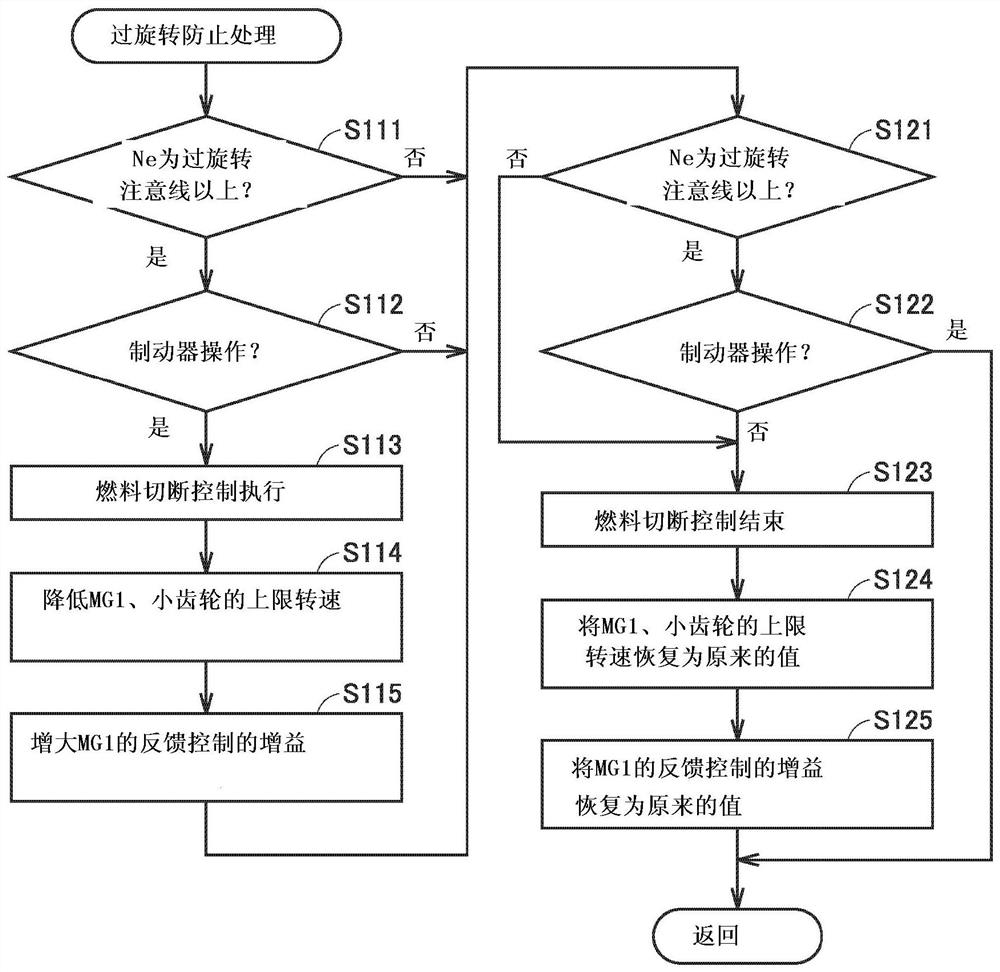
图9是示出过旋转防止处理的流程的流程图。该过旋转防止处理由HV-ECU62在每个规定周期中反复执行。参照图9,HV-ECU62判断发动机13的转速Ne是否为由图7的线L7表示的过旋转注意区域的下限的线以上(步骤S111)。在判断为转速Ne不为过旋转注意线以上(在步骤S111中为否)的情况下,HV-ECU62使执行的处理进入步骤S121。
另一方面,在判断为转速Ne为过旋转注意线以上(在步骤S111中为是)的情况下,HV-ECU62根据是否从制动器踏板传感器71接收到检测信号来判断是否操作了制动器踏板72(步骤S112)。在判断为未操作制动器踏板72(在步骤S112中为否)的情况下,HV-ECU62使执行的处理进入步骤S121。
另一方面,在判断为操作了制动器踏板72(在步骤S112中为是)的情况下,HV-ECU62开始使发动机13中的燃料喷射停止的燃料切断控制的执行(步骤S113)。由此,通过发动机制动而发动机13的转速急剧下降。
图10是示出执行了过旋转防止处理的情况下的发动机13、第一MG14及输出要素(齿圈R)的转速的关系的列线图。参照图10,虚线表示图8的实线所示的不执行过旋转防止处理的情况下的齿圈R的转速的急减速后。实线表示执行了过旋转防止处理的情况下的齿圈R的转速的急减速后。即使齿圈R的转速因由制动器踏板72的操作等引起的急制动而急下降,由于因燃料切断控制而发动机13的转速也急剧下降,所以齿轮架C的转速也下降,连接有第一MG14的太阳轮S的转速也下降。
另外,在执行了过旋转防止处理的情况下,与不执行的情况相比,太阳轮S与齿轮架C的转速之差变小,因此小齿轮P的转速下降。
返回图9,HV-ECU62降低在第一MG14及小齿轮P的转速的控制中使用的上限转速(步骤S114)。由此,按照第一MG14及小齿轮P的降低后的上限转速来控制发动机13及第一MG14,因此能够使得难以超过第一MG14及小齿轮P的原来的设计上的上限转速。
另外,HV-ECU62使第一MG14的反馈控制的反馈增益从原来的值变大(步骤S115)。
在混合动力车辆中,发动机13由第一MG14的产生转矩控制。发动机13输出根据转速和要求发动机功率而计算出的目标转矩。因而,第一MG14的控制转矩根据功率和转速而唯一地决定。以该第一MG14的控制转矩为前馈项。但是,由于存在环境、燃料、硬件的不均,所以根据相同的要求发动机功率和转速,发动机13未必会实际输出相同的转矩。
相对于发动机13的输出转矩的不均,若仅通过上述的前馈项来应对的话,则可能会引起发动机13的逆旋转及过旋转之类的现象。因而,使用发动机13的实际的转速相对于目标转速的偏差来进行基于第一MG14的产生转矩的转速的反馈控制。
例如,反馈项通过将比例项与积分项相加来计算。根据发动机13的目标转速,计算第一MG14的目标转速。比例项通过对第一MG14的目标转速与实转速的偏差乘以反馈增益的比例增益来计算。积分项通过对将上次的偏差与本次的偏差相加而得到的值乘以反馈增益的积分增益来计算。
在上述的步骤S115中,将该反馈增益的比例增益Kp1及积分增益Ki1分别变更为大的值Kp2、Ki2。比例增益Kp1及积分增益Ki1在设计时被确定为第一MG14的转速会向目标转速快速稳定收敛的值。另外,比例增益Kp2及积分增益Ki2在设计时被确定为以下的值:在转速Ne为过旋转注意线以上且操作了制动器踏板72的情况下,不仅第一MG14的转速会向目标转速快速稳定收敛,第一MG14及小齿轮P的转速也不会超过上限转速。
在判断为发动机13的转速Ne不为过旋转注意线以上(在步骤S111中为否)的情况、判断为未操作制动器踏板72(在步骤S112中为否)的情况下,以及在步骤S115之后,HV-ECU62判断发动机13的转速Ne是否为由图7的线L7表示的过旋转注意区域的下限的线以上(步骤S121)。在判断为转速Ne为过旋转注意线以上(在步骤S121中为是)的情况下,HV-ECU62判断是否操作了制动器踏板72(步骤S122)。在判断为正在操作制动器踏板72(在步骤S122中为是)的情况下,HV-ECU62使执行的处理返回该过旋转防止处理的调出源的处理。
另一方面,在判断为转速Ne不为过旋转注意线以上(在步骤S121中为否)的情况及判断为未操作制动器踏板72(在步骤S122中为否)的情况下,HV-ECU62结束在步骤S113中开始的燃料切断控制(步骤S123),将在步骤S114中降低后的第一MG14及小齿轮P的上限转速恢复为原来的值(步骤S124),将在步骤S115中增大后的第一MG14的反馈控制的反馈增益恢复为原来的值(步骤S125)。之后,HV-ECU62使执行的处理返回该过旋转防止处理的调出源的处理。
[第一MG14或小齿轮P的负侧的过旋转的防止]
在如上所述的具备行星齿轮机构20的车辆10的驱动系统中,对小齿轮P、第一MG14及第二MG15在硬件上的要件下设定有上下限转速。由于第二MG15的转速与车速成比例,所以为了防止过旋转,能够以上限车速限制。但是,关于第一MG14及小齿轮P的转速,由于根据此时的发动机13的转速和车速(第二MG15的转速)而变化,所以在过旋转上需要充分的注意。
尤其是,在高车速(也就是说,齿圈R的转速大)的情况下,若发动机13成为停止状态,则齿圈R与齿轮架C(发动机13)的转速之差变大,小齿轮P的转速会成为负侧的过旋转。
于是,本公开的车辆10的HV-ECU62在是第一MG14或小齿轮P成为下限转速的发动机13的转速超过0的车速的情况下,以使发动机13启动的方式控制发动机13。优选的是,以使发动机13的目标转速成为第一MG14或小齿轮P成为下限转速的发动机13的转速以上的方式控制发动机13及第一MG14。由此,在第一MG14或小齿轮P有可能超过下限转速的情况下,能够使发动机13启动而使得第一MG14或小齿轮P不超过下限转速。
[车辆后退时的第一MG14或小齿轮P的过旋转的防止]
在如上所述的具备行星齿轮机构20的车辆10的驱动系统中,对小齿轮P、第一MG14及第二MG15在硬件上的要件下设定有上下限转速。由于第二MG15的转速与车速成比例,所以为了防止过旋转,能够以上限车速限制。但是,关于第一MG14及小齿轮P的转速,由于根据此时的发动机13的转速和车速(第二MG15的转速)而变化,所以在过旋转上需要充分的注意。
尤其是,在车辆10的后退时,在发动机13正在产生转矩且第二MG15成为负旋转(成为负车速)的情况下,第一MG14或小齿轮P的转速容易成为高旋转。
于是,本公开的车辆10的HV-ECU62在是某车速下的第一MG14或小齿轮P成为过旋转的发动机13的转速的情况下,以强制性地使发动机13停止的方式控制发动机13。由此,在第一MG14或小齿轮P有可能超过上限转速的情况下,能够使发动机13停止而使得第一MG14或小齿轮P不超过上限转速。
若车速进一步向负侧增加,则即使在发动机13未产生转矩的情况下,第一MG14或小齿轮P也会成为过旋转。
于是,本公开的车辆10的HV-ECU62在由档位传感器78检测到档位是倒车档时,以在预想为第一MG14或小齿轮P会超过上限转速的负车速下产生正车速侧的驱动转矩的方式控制发动机13、第一MG14及第二MG15。由此,能够抑制车速向负侧的增加。其结果,能够使得第一MG14或小齿轮P的转速不成为过旋转。
图11是示出变更前的后退时的驱动力映射的图。图12是示出变更后的后退时的驱动力映射的图。参照图11及图12,在驱动力映射中,与变更前相比,在变更后,齿圈R的转速Np最低的情况下的要求转矩Tpa不管加速器开度如何都为正的值。由此,在后退时的车速以齿圈R的转速Np成为最低的程度增加的情况下,要求转矩Tpa成为正的值,车辆10前进的方向的转矩向齿圈R施加。因而,能够使得后退方向的车速不进一步增加。
[发动机制动时的充电电力限制值Win的超过的防止]
在不是混合动力车辆的车辆中,在行驶中的加速器关闭下,通过发动机制动而减速。在如上所述的是混合动力车辆的车辆10中,为了得到同样的操作性,也以在加速器关闭下产生负的驱动力的方式控制发动机13、第一MG14及第二MG15。在该情况下,通过基本上使第二MG15作为发电机进行动作而产生使车辆10减速的转矩。此时,产生第二MG15的再生电力,向蓄电池18充电。
因而,在因蓄电池18的充电电力限制值Win而限制再生电力的情况下,无法产生使车辆10减速的转矩。加速器关闭下的减速转矩不宜根据充电电力限制值Win的状况而不同,因此需要某些应对。作为该应对,在是混合动力车辆的车辆10中,通过在发动机13中不使燃料燃烧而利用外力来使发动机13旋转的拖动来消耗车辆10的动能。这样,在是混合动力车辆的车辆10中,兼顾基于发动机制动的减速和充电电力限制值Win的超过的防止。
若充电电力限制值Win变小,则使发动机13的转速上升,使通过拖动而消耗的能量增加,但发动机13、第一MG14及小齿轮P的转速存在上限。因而,能够上升的发动机13的转速存在界限。另外,通过使发动机13的转速上升,有可能产生与通常不同的发动机噪声而引起NV(Noise、Vibration:噪声、振动)的观点下的违和感。
于是,本公开的车辆10的HV-ECU62通过发动机13的转速成为了第一规定转速以上而使规定标志成为激活状态,在规定标志为激活状态且需要规定转矩以上的发动机制动时,向发动机ECU64输出发动机制动增加要求。发动机ECU64根据来自HV-ECU62的发动机制动增加要求,控制VVT机构46而使进气门的开闭正时提前。
发动机制动的大小(也就是说,由发动机13消耗的能量)由每单位循环(或每单位旋转)的损失和发动机13的转速决定。因而,在需要大的发动机制动的情况下,增加每循环的损失或者增加发动机13的转速。但是,若使发动机13的转速增加,则在NV上会有影响。另外,发动机13的转速存在容许上限转速。因而,在该实施方式中,以增加每循环的损失的方式控制VVT机构46而使进气门的开闭正时提前。由此,与不提前的情况相比,发动机13的泵损失增加,压缩做功增大,从而能够加强发动机制动。其结果,能够减小第二MG15(或第一MG)的再生电力,因此能够使得再生电力难以超过充电电力限制值Win。
[急减速时的充电电力限制值Win的超过的防止]
在是混合动力车辆的车辆10中,以发动机13的输出的一部分由第一MG14变换为电力且该电力由第二MG15消耗为前提,以不超过蓄电池18的充电电力限制值Win及放电电力限制值Wout的方式决定第一MG14、第二MG15及发动机13的输出的指令值。
但是,若因TRC(TRaction Control:牵引控制)的工作或急减速等而导致第二MG15中的电力的消耗骤减,则向蓄电池18的充电电力可能会超过充电电力限制值Win而成为过充电。在此,TRC是以下控制:在容易打滑的路面上的起步时及加速时,若传感器感知到驱动轮的空转,则自动地设定各轮的制动液压及车辆的目标驱动力等的最佳值,确保最佳的驱动力。
于是,HV-ECU62在显著的过充电时(例如,在实际充电电力超过对充电电力限制值Win加上第一规定电力值而得到的值时),以强制性地切断在发动机13中喷射的燃料的方式控制发动机13。由此,第一MG14的发电电力减小,因此能够使得难以超过充电电力限制值Win。
在该情况下,HV-ECU62在实际充电电力变得低于对充电电力限制值Win加上第二规定电力值(<第一规定电力值)而得到的值时,以结束在发动机13中喷射的燃料的强制性的切断的方式控制发动机13。
另外,也可以如以下所示这样进行控制。图13是示出Win超过时处理的流程的流程图。该Win超过时处理由HV-ECU62在每个规定周期中反复执行。
参照图13,HV-ECU62判断实际充电电力是否为对充电电力限制值Win加上第三规定电力值A而得到的值以上且小于对充电电力限制值Win加上第四规定电力值B而得到的值(步骤S131)。在判断为实际充电电力为对充电电力限制值Win加上A而得到的值以上且小于对充电电力限制值Win加上B而得到的值(在步骤S131中为是)的情况下,HV-ECU62以将发动机13切换为自主运转的方式进行控制(步骤S132)。自主运转是指怠速转速下的发动机13的运转。怠速转速是发动机13因通过燃料的燃烧而自己产生的动力超过摩擦等旋转的阻力而能够稳定地继续旋转的转速,通常被调整为能够稳定地继续旋转的最小限度的转速。
在判断为实际充电电力不为对充电电力限制值Win加上A而得到的值以上或者不小于对充电电力限制值Win加上B而得到的值(在步骤S131中为否)的情况下,以及在步骤S132之后,HV-ECU62判断实际充电电力是否为对充电电力限制值Win加上第四规定电力值B而得到的值以上(步骤S133)。在判断为实际充电电力为对充电电力限制值Win加上B而得到的值以上(在步骤S133中为是)的情况下,HV-ECU62开始将在发动机13中喷射的燃料强制性地切断的发动机13的控制(步骤S134)。
在判断为实际充电电力不为对充电电力限制值Win加上B而得到的值以上(在步骤S133中为否)的情况下,以及在步骤S134之后,HV-ECU62判断实际充电电力是否变得小于对充电电力限制值Win加上第三规定电力值A而得到的值(步骤S135)。在判断为实际充电电力变得小于对充电电力限制值Win加上A而得到的值(在步骤S135中为是)的情况下,HV-ECU62将发动机13的控制恢复为在步骤S132中切换后的自主运转的控制或在步骤S134中开始的燃料切断控制之前的通常的控制(步骤S136)。
在判断为实际充电电力未变得小于对充电电力限制值Win加上A而得到的值(在步骤S135中为否)的情况下,以及在步骤S136之后,HV-ECU62使执行的处理返回该Win超过时处理的调出源的处理。
图14是用于说明基于Win超过时处理的控制的图。参照图14,通过图13所示的Win超过时处理,如步骤S133及步骤S134所示,在实际充电电力超过对充电电力限制值Win加上第四规定电力值B而得到的值的情况下,执行发动机13的燃料切断控制。如步骤S131及步骤S132所示,在实际充电电力超过对充电电力限制值Win加上第三规定电力值A而得到的值且实际充电电力低于对充电电力限制值Win加上第四规定电力值B而得到的值的情况下,执行将发动机13切换为自主运转的控制。如步骤S135及步骤S136所示,在实际充电电力变得低于对充电电力限制值Win加上第三规定电力值A而得到的值的情况下,发动机13的控制恢复为通常控制。
[变形例]
(1)在前述的实施方式中,如图9的步骤S111及步骤S112所示,预想为第一MG14或小齿轮P的转速会超过上限转速的规定条件设为了发动机13的转速Ne为过旋转注意线以上且操作了制动器踏板72这一条件。
但是,不限定于此,预想为第一MG14或小齿轮P的转速会超过上限转速的规定条件只要是能够检测出预想为第一MG14或小齿轮P的转速会超过上限转速的条件即可,也可以是其他条件。
例如,规定条件也可以是发动机13的转速Ne为过旋转注意线以上且驱动轮24与行星齿轮机构20之间的规定要素(例如,输出齿轮21、从动齿轮26、副轴25、驱动齿轮27、31、齿圈29、差速齿轮28、驱动轴32、33、转子轴30等)的转速正在以规定加速度以上的加速度进行减速这一条件。规定加速度只要是表示正在操作制动器踏板72的加速度即可,也可以是能够检测的最小的值。规定要素的转速由转速传感器检测。
(2)在前述的实施方式中,行星齿轮机构20的齿轮架C连接于发动机13,太阳轮S连接于第一MG14,齿圈R连接于驱动轴。但是,不限定于此,与行星齿轮机构20的各要素连接的装置也可以不同。
[总结]
(1)如图1及图2所示,车辆10具备:发动机13;第一MG14;行星齿轮机构20,由连接于发动机13的输出轴的第一要素(例如,齿轮架C)、连接于第一MG14的转子轴23的第二要素(例如,太阳轮S)及连接于向驱动轮24传递动力的驱动轴(例如,输出齿轮21、从动齿轮26、副轴25等)的第三要素(例如,齿圈R)构成,包括特定齿轮(例如,小齿轮P);及HV-ECU62,控制发动机13及第一MG14。如图9所示,HV-ECU62在步骤S111及步骤S112中判断为预想为第一MG14或特定齿轮会超过上限转速的规定条件成立的情况下,在步骤S113~步骤S115中,执行以不超过上限转速的方式控制发动机13及第一MG14的特定控制。
由此,在预想为第一MG14或特定齿轮会超过上限转速的情况下,能够使得不超过上限转速。其结果,能够使得第一MG14或特定齿轮不超过上限转速。
(2)如图9的步骤S114所示,作为特定控制,HV-ECU62执行在规定条件成立的情况下与规定条件不成立的情况相比减小上限转速的控制。
由此,在规定条件成立的情况下,减小上限转速来控制发动机13及第一MG14。其结果,能够使得第一MG14或特定齿轮难以超过上限转速。
(3)如图1所示,行星齿轮机构20包括作为第一要素的齿轮架C、作为第二要素的太阳轮S、作为第三要素的齿圈R及作为特定齿轮的多个小齿轮P。
由此,在具备包括齿轮架C、太阳轮S、齿圈R及小齿轮P的行星齿轮机构20的车辆10中,能够使得第一MG14或小齿轮P不超过上限转速。
(4)如图9的步骤S111及步骤S112以及变形例所示,规定条件是发动机13的转速超过了与驱动轴的转速对应地预先确定的转速且驱动轴正在以规定加速度以上的加速度进行减速这一条件。
由此,在发动机13的转速超过了与驱动轴的转速对应地预先确定的转速且驱动轴正在以规定加速度以上的加速度进行减速的情况下,能够使得第一MG14或特定齿轮不超过上限转速。
(5)如图2所示,车辆10还具备使对驱动轴进行制动的制动器动作的制动器踏板72。如图9的步骤S111及步骤S112所示,规定条件是发动机13的转速超过了与驱动轴的转速对应地预先确定的转速且正在操作制动器踏板72这一条件。
由此,在发动机13的转速超过了与驱动轴的转速对应地预先确定的转速且正在操作制动器踏板72的情况下,能够使得第一MG14或特定齿轮不超过上限转速。
(6)如图9的步骤S115所示,作为特定控制,HV-ECU62执行在规定条件成立的情况下与规定条件不成立的情况相比增大第一MG14的转速控制的反馈增益的控制。
由此,在规定条件成立的情况下,增大第一MG14的转速控制的反馈增益来控制发动机13及第一MG14。其结果,能够使得第一MG14或特定齿轮难以超过上限转速。
(7)如图9的步骤S113所示,作为特定控制,HV-ECU62执行停止向发动机13的燃料的供给的控制。
由此,在规定条件成立的情况下,向发动机13的燃料的供给停止。其结果,能够使得第一MG14或特定齿轮难以超过上限转速。
(8)如图1及图2所示,车辆10还具备能够蓄积由第一MG14发电产生的电力并且能够将蓄积的电力向第一MG14供给的蓄电池18。如图13及图14所示,HV-ECU62以向蓄电池18充电的电力值不超过充电电力限制值Win为目标来控制发动机13及第一MG14,在步骤S131中判断为向蓄电池18充电的电力值为从对充电电力限制值Win加上第三规定电力值A而得到的值到对充电电力限制值Win加上比第三规定电力值A大的第四规定电力值B而得到的值为止的范围内时,在步骤S132中,以使发动机13以怠速转速运转的方式进行控制,在步骤S133中判断为向蓄电池18充电的电力值超过对充电电力限制值Win加上第四规定电力值B而得到的值时,在步骤S134中,停止向发动机13的燃料的供给。
由此,能够使得向蓄电池18充电的电力值难以超过充电电力限制值Win。
(9)如图1及图2所示,车辆10还具备连接于驱动轴的第二MG15。如图12所示,HV-ECU62在档位是倒车档时,以在预想为第一MG14或特定齿轮会超过上限转速的负车速下产生正车速侧的驱动转矩的方式控制发动机13、第一MG14及第二MG15。
由此,能够使得在负车速下第一MG14或特定齿轮不超过上限转速。
本次公开的各实施方式也计划适当组合而实施。
虽然对本发明的实施方式进行了说明,但应该认为,本次公开的实施方式在所有方面都是例示而非限制性的内容。本发明的范围由权利要求书表示,意在包括与权利要求书均等的含义及范围内的所有变更。
- 用于混合动力车辆的变速器、用于具有这种变速器的混合动力车辆的动力总成系统以及用于起动混合动力车辆的方法
- 利用根据电池的温度的节气门控制的混合动力车辆、用于混合动力车辆的控制装置及用于混合动力车辆的控制方法