一种水下清洗机器人
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及水下清洗技术领域,具体涉及一种水下清洗机器人。
背景技术
随着人们物质生活水平的提高,为追求更高质量的生活,游泳池已变为人们休闲娱乐常去的娱乐场所。同时,人们对居住环境的要求变高,很多小区建设有水池,水池采用与游泳池内相同的瓷砖,这种露天的水池特别容易积灰,经常需要清洗。不管是私人游泳池,还是公用游泳池,或者露天水池,池水的清洁是人们关心的重要要素。通常,为保持清洁,池水需要定期更换,游泳池也需要定期清洗。传统清理方式一般为人工清洗,这不仅费时费力,还造成了水资源的浪费。因此,需要一种方便泳池清洗的水下清洗机器人。
发明内容
本发明的目的在于针对现有技术的缺陷和不足,提供一种水下清洗机器人。
为实现上述目的,本发明采用的技术方案是:一种水下清洗机器人,包括框体,所述框体内设置有一密封舱;其特征在于,所述框体包括上框体和下框体,所述上框体和下框体的四个顶角分别通过一纵向转轴转动连接,所述纵向转轴上连接有一清洁辊,所述清洁辊的外侧可拆卸连接有刷洗布;所述上框体和下框体的每一边通过多个支撑筋进行连接,所述下框体的下方设置有两个横向转轴,每一所述横向转轴上固定设置有毛刷。
进一步的,每一所述横向转轴上设置有一从动带轮,所述下框体的上端固定连接有两驱动电机,且两所述驱动电机固定连接在一防护罩内,所述防护罩设置在密封舱的下方且与密封舱之间设置有减震垫,两所述驱动电机输出轴连接有一主动带轮,所述主动带轮与从动带轮通过皮带进行连接。
进一步的,所述框体的每一边的中间位置设置有一碰撞传感器。
进一步的,所述框体上设置有水平推进器和垂直推进器。
优选的,所述水平推进器的个数为四个,所述垂直推进器的个数为两个。
进一步的,所述框体下方各顶角位置设置有一旋转毛刷,所述旋转毛刷的上端通过毛刷轴连接在框体顶部,所述毛刷轴与横向转轴之间通过伞齿进行传动。
进一步的,所述密封舱内还设置有一控制器,所述控制器包括蓄电池、电源电路、单片机、H桥控制电路和一信号传输模块;所述蓄电池为整个机器人供电;所述电源电路将蓄电池的电压转化为单片机及其他模块所需要的电压;所述单片机的输入端电连接碰撞传感器,所述单片机通过H桥控制电路双向电连接驱动电机,所述单片机通过信号传输模块无线电连接外部控制设备;所述单片机的输出端电连接水平推进器和垂直推进器。
进一步的,所述刷洗布通过魔术贴可拆卸连接在清洁辊的外侧。
进一步的,所述毛刷包括一圆柱形固定座及固定在圆柱形固定座上的刷毛,所述刷毛呈多条波浪条状布置在圆柱形固定座上。
本发明的实施例还提供一种水下清洗机器人的清扫方法,具体包括以下过程:
S1、组装整个设备,将手机或PC机与机器人形成无线连接,通过手机APP或PC机的软件对机器人进行控制;
S2、将机器人沿着水池或泳池的某一角落放入水池或泳池中,通过控制垂直推进器,让机器人接触到泳池或水池底部;
S3、控制水平推进器,向竖直或垂直方向推进,直到前进方向前端的碰撞传感器检测到碰撞压力;
S4、当手机或PC机选择让机器人全覆盖工作模式时,碰撞后,通过控制水平推进器,向后退半个机器人宽度,将机器人转弯90°;转弯后,向前行进半个宽度的距离,再次转弯90°,控制水平推进器向前行进,直到碰撞传感器检测到碰撞压力;重复以上过程,实现机器人在池底S形全覆盖行进;
S4-1、在行进过程中,驱动电机通过主动带轮带动皮带,皮带带动从带带轮,从动带轮带动横向转轴旋转,横线转轴旋转时,带动毛刷旋转,毛刷上的多条波浪条状的刷毛对池底进行清洁;
S4-2、在转弯过程中,当控制机器人旋转90°的过程中,机器人的顶角位置上的的刷洗布对所接触的池壁进行刷洗,同时,纵向转轴带动清洁辊及刷洗布对池壁进行滚动刷洗;
S5、当手机或PC机选择让机器人沿池壁工作模式时,机器人的某一碰撞传感器检测到碰撞压力后,退后半个机器人宽度,通过控制水平推进器,实现转弯90°,转弯后,沿着某一方向向前行进,直到某一碰撞传感器检测到碰撞压力后,再次进行转弯;重复以上转弯后的过程,直到完成整个沿池壁工作;
S6、完成清扫后,将完成信号发送给手机或PC机,手机或PC机控制垂直推进器,机器人退回到水面。
采用上述结构和方法后,本发明有益效果为:
本发明的水下清洗机器人中,上框体与下框体之间通过纵向转轴进行连接,当机器人清扫角落时,纵向转轴上的清洁辊及清洁辊上的刷洗布与角落处的侧壁接触,接触时,清洁辊在受力作用下,带动纵向转轴旋转,对侧壁进行清扫;同时,在行进过程中,下框体下方的横向转轴带动毛刷旋转,对地面进行清扫;因此,这种机器人可以实现底面及侧面进行清扫,使用方便,适用性更广。
本发明的水下清洗机器人的清扫方法,包括全覆盖和沿池壁工作模式,可以根据所需要的功能进行选择,当清洗过程中,在行进过程中,驱动电机通过主动带轮带动皮带,皮带带动从带带轮,从动带轮带动横向转轴旋转,横线转轴旋转时,带动毛刷旋转,毛刷上的多条波浪条状的刷毛对池底进行清洁;在转弯过程中,当控制机器人旋转90°的过程中,机器人的顶角位置上的的刷洗布对所接触的池壁进行刷洗,同时,纵向转轴带动清洁辊及刷洗布对池壁进行滚动刷洗;实现池底、池壁的清洗。
附图说明
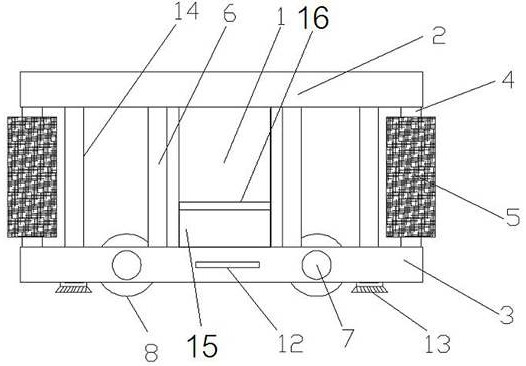
图1为本发明的结构示意图;
图2为本发明的底部结构示意图。
附图标记说明:1、密封舱;2、上框体;3、下框体;4、纵向转轴;5、刷洗布;6、支撑筋;7、横向转轴;8、毛刷;81、圆柱形固定座;82、刷毛;9、从动带轮;10、主动带轮;11、皮带;12、碰撞传感器;13、旋转毛刷;14、毛刷轴;15、防护罩;16、减震垫。
具体实施方式
下面结合附图对本发明作进一步的说明。
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施方式,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施方式仅用以解释本发明,并不用于限定本发明。
一种水下清洗机器人,包括框体,所述框体内设置有一密封舱1;所述框体包括上框体2和下框体3,所述上框体2和下框体3的四个顶角分别通过一纵向转轴4转动连接,所述纵向转轴4上连接有一清洁辊,所述清洁辊的外侧可拆卸连接有刷洗布5;所述上框体2和下框体3的每一边通过多个支撑筋6进行连接,所述下框体3的下方设置有两个横向转轴7,每一所述横向转轴7上固定设置有毛刷8,所述毛刷8包括一圆柱形固定座81及固定在圆柱形固定座81上的刷毛82,所述刷毛82呈多条波浪条状布置在圆柱形固定座81上。这种毛刷8上具有呈现多条波浪条状的刷毛82对地面进行清扫,在运行过程中不断有刷毛82接触地面,而且不会形成很大运行阻力,方便运行。
在进一步的实施例中,每一所述横向转轴7上设置有一从动带轮9,所述下框体的上端固定连接有两驱动电机,且两所述驱动电机固定连接在一防护罩15内,所述防护罩15设置在密封舱1的下方且与密封舱1之间设置有减震垫16,减震垫16起到减震作用,两所述驱动电机输出轴连接有一主动带轮10,所述主动带轮10与从动带轮9通过皮11带进行连接。优选的,所述驱动电机选用可以在水下工作的驱动电机,且在驱动电机的外侧设置有一防护罩15,对驱动电机进行保护,提升使用寿命,
在进一步的实施例中,所述框体的每一边的中间位置设置有一碰撞传感器12,碰撞传感器12将信号送入单片机,从而单片机控制不同的水平推进器工作,实现在水中行进清扫。
在进一步的实施例中,所述框体上设置有水平推进器和垂直推进器。
优选的,所述水平推进器的个数为四个,所述垂直推进器的个数为两个。
在进一步的实施例中,所述框体下方各顶角位置设置有一旋转毛刷13,所述旋转毛刷13的上端通过毛刷轴14连接在上框体2上,所述毛刷轴14与横向转轴7之间通过伞齿进行传动,将横向旋转转向纵向旋转。
在进一步的实施例中,所述密封舱1内还设置有一控制器,所述控制器包括蓄电池、电源电路、单片机、H桥控制电路和一信号传输模块;所述蓄电池为整个机器人供电;所述电源电路将蓄电池的电压转化为单片机及其他模块所需要的电压;所述单片机的输入端电连接碰撞传感器12,所述单片机通过H桥控制电路双向电连接驱动电机,所述单片机通过信号传输模块无线电连接外部控制设备;所述单片机的输出端电连接水平推进器和垂直推进器。本发明中的信号传输模块采用无线传输模块,外部控制设备可以是PC机或手机,通过PC机的软件或手机APP对机器人进行控制,自动化程度高,使用非常方便,密封舱1与外部进行导线连接时,各导线伸出的位置进行密封胶密封。
在本实施例中,单片机通过H桥控制电路控制驱动电机旋转,驱动电机带动主动带轮10旋转,主动带轮10通过皮带11带动从动带轮9旋转,从动带轮9带动横向转轴7旋转,横向转轴7旋转带动毛刷8旋转,从而对水下地面进行清洁;横向转轴7旋转时,通过伞齿将旋转动力转化为带动毛刷轴14旋转的动力,从而带动毛刷轴14,毛刷轴14的下方固定的旋转毛刷13旋转,将整个机器人所涉及的各角落位置进行清扫。
在进一步的实施例中,所述刷洗布5通过魔术贴可拆卸连接在清洁辊的外侧,通过魔术贴方便了刷洗布5的更换。
本发明的一种水下清洗机器人的清洗方法,具体包括如下过程:
S1、组装整个设备,将手机或PC机与机器人形成无线连接,通过手机APP或PC机的软件对机器人进行控制;
S2、将机器人沿着水池或泳池的某一角落放入水池或泳池中,通过控制垂直推进器,让机器人接触到泳池或水池底部;
S3、控制水平推进器,向竖直或垂直方向推进,直到前进方向前端的碰撞传感器12检测到碰撞压力;
S4、当手机或PC机选择让机器人全覆盖工作模式时,碰撞后,通过控制水平推进器,向后退半个机器人宽度,将机器人转弯90°;转弯后,向前行进半个宽度的距离,再次转弯90°,控制水平推进器向前行进,直到碰撞传感器检测到碰撞压力;重复以上过程,实现机器人在池底S形全覆盖行进;
S4-1、在行进过程中,驱动电机通过主动带轮10带动皮带11,皮带11带动从带带轮9,从动带轮9带动横向转轴7旋转,横线转轴7旋转时,带动毛刷8旋转,毛刷8上的多条波浪条状的刷毛82对池底进行清洁;
S4-2、在转弯过程中,当控制机器人旋转90°的过程中,机器人的顶角位置上的的刷洗布对所接触的池壁进行刷洗,同时,纵向转轴4带动清洁辊及刷洗布5对池壁进行滚动刷洗;
S5、当手机或PC机选择让机器人沿池壁工作模式时,机器人的某一碰撞传感器12检测到碰撞压力后,退后半个机器人宽度,通过控制水平推进器,实现转弯90°,转弯后,沿着某一方向向前行进,直到某一碰撞传感器12检测到碰撞压力后,再次进行转弯;重复以上转弯后的过程,直到完成整个沿池壁工作;沿池壁工作模式中,行进过程中按照S4-1的步骤,对池底进行清扫;在转弯过程中按照S4-2的步骤,对池壁进行清扫。
S6、完成清扫后,将完成信号发送给手机或PC机,手机或PC机控制垂直推进器,机器人退回到水面。完成后,将水排出,再送入清洁的水源。
以上所述,仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其它修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
- 一种空化射流智能喷嘴及水下清洗机器人
- 一种适用于水下环境清刷的智能清洗机器人