用于估计绕线转子同步机器的转子的速度和位置的方法
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及绕线转子同步电机领域。
更具体地,本发明涉及用于确定绕线转子同步电机的转子的位置和速度的方法。
背景技术
为了控制绕线转子同步电机(缩写为WRSM),通常需要知道转子的位置和速度。
现有技术已知的一种解决方法包括在该机器的机械轴上安装一个或多个机械的位置传感器和速度传感器。
然而,这些机械传感器价格昂贵、体积庞大、对环境(温度、噪声、机械振荡、电磁兼容性等)敏感,并且会降低系统的可靠性。
因此,为了避免使用机械传感器,已经开发了不使用机械传感器的控制方法,以确保与使用机械传感器进行控制的方法相比质量相同或甚至更好的控制。
通常,这些无传感器控制方法使用在闭环模式下仅基于电流的测量结果的机械位置/速度估计方法,也称为软件传感器。
还已知的是用于通过注入高频信号来估计转子的位置/速度的方法,如文献US2004070360 A1中所描述的,该方法具有允许较少地依赖于机器参数进行检测的效果。
然而,这些方法仍然依赖于电机的参数,并且更具体地对于WRSM而言,依赖于转子所经历的定子电感。另外,这些技术依赖于了解注入信号的特性,诸如幅度和频率。
因此,需要一种更可靠并且更少地依赖于绕线转子同步电机的参数的位置/速度估计方法。
发明内容
为此,提出了一种用于估计由三相逆变器供电的绕线转子同步电机的转子的速度和位置的方法,该方法包括:
-测量该绕线转子同步机器的输入端处的三相电流的步骤;
-将所测得的三相电流变换为两相参考系的步骤;
-第一部分包括:
-在该机器的输入端处注入高频电压信号的步骤;
其特征在于,该第一部分进一步包括确定转子位置误差值,包括:
-通过旋转π/4弧度将所测得的转换的电流变换为两相参考系的第二步骤;
-对通过该第二变换步骤变换的电流进行解调的步骤,包括高通滤波或带通滤波并允许确定估计误差信号;
-估计由转子加速度以及该解调步骤的高通滤波或带通滤波产生的相移,以细化在该解调步骤中确定的估计误差信号的步骤;
-将所测得电流的高频分量与低频分量分离的步骤;所述分离步骤独立于低通滤波并且允许确定该转子位置估计误差的符号;
该方法进一步包括根据所获得的估计误差的符号,用互不相关的增益参数来逐步估计该位置、该速度和该转子加速度的第二部分。
因此,仅根据所获得的估计误差的符号(该符号是根据通过注入高频电压而计算出的误差信号来定义的)可以获得对该绕线转子的位置、速度和加速度的相对简单且稳健的估计。这尤其使得可以获得转子位置估计值、速度估计值和加速度估计值,这些估计值彼此独立并且更具体地通过彼此独立的增益来校准。
有利地并且以非限制性的方式,该解调步骤包括对所述电流的高通滤波。因此,该解调相对简单且稳健,并且不会产生关于转子位置获得的估计的延迟。
有利地并且以非限制性的方式,该相移估计步骤包括低频滤波。因此,对相移的估计是相对简单且高效的。
有利地并且以非限制性的方式,该相移估计步骤包括锁相环。因此,对相移的估计被相对稳健地控制。
有利地并且以非限制性的方式,将所测得电流的高频分量与低频分量分离的步骤包括计算以下方程所限定的转子位置估计误差信号:
其中,I
因此,可以根据估计误差信号来简单地确定该转子位置误差的符号,从而然后使得可以实施该方法的第二部分,以获得对该转子的速度、位置和加速度的简单且稳健的估计。
有利地并且以非限制性的方式,该第二部分包括实施至少一个低通滤波器。该低通滤波器使得可以限制转子位置误差符号函数的抖动现象。
特别地,所述低通滤波器是4阶滤波器。因此,这种滤波器不会对转子的速度、位置和加速度的估计产生不期望的影响(诸如相移)。
本发明还涉及一种用于估计转子的速度和位置的设备,该设备包括用于实施如前所述的方法的装置。
本发明还涉及一种电气组件,该电气组件包括绕线转子同步电机以及如前所述的估计设备。
本发明还涉及一种包括如前所述的电气组件的机动车辆。
附图说明
参考附图,通过阅读以下以指示性且非限制性方式给出的本发明的具体实施例的描述,本发明的其他具体特征和优点将变得明显,在附图中:
-图1是根据本发明的实施例的电机的控制组件的示意图;
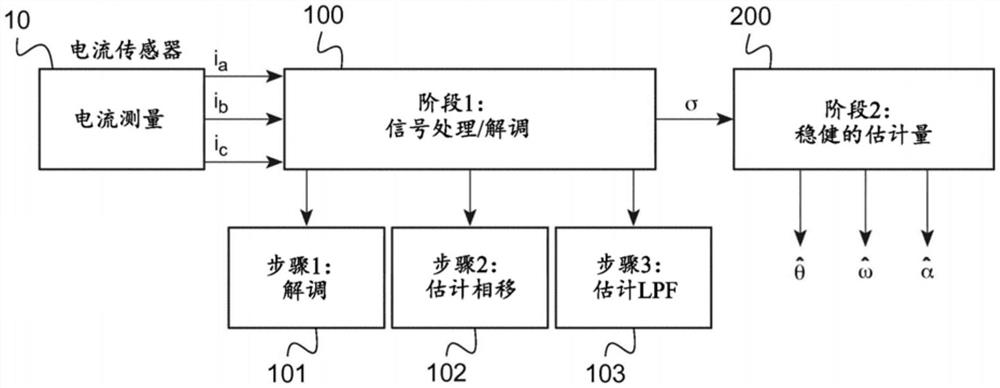
-图2是根据本发明的实施例的估计方法的示意图;
-图3是根据图2的实施例的方法的估计定子电流的相移的步骤的表示;
-图4是根据图2的实施例的方法的独立于低通滤波器的高频/低频分离步骤的表示;
-图5是根据图2的实施例的方法的第二估计部分的视图;以及
-图6是电流相对于转子参考系的几何变换的表示,
-以及图7是根据方程(12)的连续算法的表示。
具体实施方式
参考图1,电机1(在此例如为电动车辆1)的控制组件包括用于从电机请求转矩的转矩设定点设备2(例如加速器踏板2)。
然后由电流调节器3处理由转矩设定点设备2产生的转矩设定点,然后由逆变器4进行处理,以向电机5(在此为绕线转子同步电机5)供应合适的控制电流。
为了允许高效地控制该机器,必须知道该机器的转子的位置(换言之,转子相对于定子的角度位置)、其速度以及有利地其加速度。为此,实施了估计方法6。
由于图2至图6涉及根据本发明的估计方法的同一个实施例,因此将同时讨论这些附图。
一种用于估计6绕线转子同步机器的转子50的速度和位置的方法包括测量10三相电流的步骤以及两个方法部分:包括信号处理和解调的第一部分100以及包括根据该第一部分的结果来估计位置和速度的第二部分200。
首先,该方法实施了测量10绕线转子同步机器的输入端处的三相电流i
然后,将所测得的三相电流i
为此,在转子参考系50中应用变换,如图6所示。因此,根据所测得的三相电流i
系统i
该方程(1)描述了根据到参考系αβ的静态三相到两相变换13(在此为肯考迪亚(Concordia)变换)的三相电流i
为了对同步机器的高频行为进行建模,然后应用基于以下两个方程的模型:
-电压-通量模型:
其中,
为了估计交流电机的位置、速度和加速度,实施所谓的脉动技术,其中,在所估计的两相参考系
在轴线
参考图6,在转子参考系50中特别表示了角相移。
脉动技术使得可以将高频(HF)电压注入所估计的两相参考系
其中:
V
ω
参考图6,如下获得相对于注入参考系偏移了
其中,
然后实施在注入高频电压之后对所得信号进行解调的步骤101。
为此,采用高通滤波器(缩写为HPF)或者根据替代方案,采用带通滤波器(单频滤波,缩写为SFF)对相移了
根据以下方程获得所得高频电流
其通过三角函数展开得出:
在这种展开中,差
估计误差信号∈根据方程(7)进行公式化,并且转子的位置与转子的所估计位置之间的角度误差
因此,通过分析估计误差信号∈,如下文中描述的,将可以根据估计误差信号∈的符号推导出位置误差
一旦已经根据方程(7)获得了估计误差信号∈,换言之,一旦已经执行了解调,则实施相移估计步骤102,如图3所示。
在机器的加速度阶段期间的速度变化会在信号载波水平(cos(ω
在解调步骤101中使用高通滤波器HPF,或者根据替代方案,使用带通滤波器(单频滤波,缩写为SFF),也会在载波水平(cos(ω
因此,载波的信号经历了这些延迟,并且其表达式(如先前在方程(7)中所公式化的)变为:
∈=Acos(ω
其中,
为了提取项A中的位置估计误差,要将∈乘以项
通过将方程(8)的估计误差乘以项
以及
通过应用低通滤波器(缩写为LPF),获得下式:
并且,通过向(11)应用连续算法(在此为锁相环,缩写为PLL),可以计算对相移φ
该对相移φ
并且因此
具体地,估计相移的目的是重构高频载波信号
上述计算使得可以估计相移φ
因此,将相移估计误差发送到连续和误差优化(PLL)步骤(参考图7)以使
然后,实施将高频分量与低频分离的步骤103,使得可以避免使用低通滤波器(LPF)。在下文的描述中,这被称为LPF估计步骤103。
之前已经确定了包含机器的位置的估计误差∈,使得该估计误差可以根据以下方程表示:
通过使该估计误差与包含相移
在凸极绕线转子机器(称为凸极转子机器)的背景下,因为L
因而:
其中:
其中,术语符号表示“所包含表达式的符号”。
根据方程(15)的表达式描述了位置估计误差的符号,而无需使用基于低通滤波器(LPF)的常规技术。
然后,将根据方程(15)的该估计误差作为信息逐步地并且在有限时间内收敛地注入到根据本发明的一组连续步骤200中。
这组步骤200对应于根据本发明的方法的第二部分200,其目的是估计交流电机的位置、速度和加速度。
在第二部分200中,为了使设置用于估计位置、速度和加速度的技术的过程变得简单明了,实施了一个估计量(也称为观察量)(该估计量很稳健并且是逐步起作用的(如图4所示)),以使位置状态、速度状态和加速度状态彼此独立地逐个地收敛。这使得可以将这些状态设置为在有限时间内收敛,其中每个状态单独考虑。
当根据方程(19)将所估计位置
如果
则
现在,估计量的唯一测量结果是:
从该方法的第一部分100得到的
由以下方程定义所提出的用于估计位置、速度和加速度的稳健的逐步观察量:
其中:
其中,
以及
以及
其中,
其中,TZ表示Z变换,该Z变换使得可以将时间函数σ(t)变换为离散函数σ(z)。
引入函数f(z)是为了检测抖动现象,因为只有估计误差的符号可用作观察量的信息;转子的位置不可用于测量。
为了获得滤波后的速度
用于观察量(21)、(22)和(23)的设计的位置、速度和加速度的虚拟机械系统如下所示:
方程(33)、(34)和(35)限定了方程(30)-(31)-(32)与观察量(21)-(22)-(23)之间的位置、速度和加速度的估计误差:
估计误差动态范围由以下方程推导:
其中,K
因此,显然,根据本发明的方法确保了位置、速度和加速度的估计误差动态范围(36)-(37)-(38)在有限时间内收敛于零。
- 用于估计绕线转子同步机器的转子的速度和位置的方法
- 用于确定绕线转子同步电机的转子的位置和速度的方法