医用手柄
文献发布时间:2023-06-19 10:08:35
优先权声明
本公开要求2018年7月31日提交的美国临时专利申请序列No.62/712,649的优先权,其公开内容通过引用并入本文。
技术领域
本公开的各方面通常涉及医疗装置和手术。具体方面涉及致动器装置和系统。
背景技术
在非侵入性手术期间,医生可以使用内窥镜和取回装置来接合体内的对象。例如,在输尿管镜手术中,医生可以使用输尿管镜和取回装置来接合肾脏、输尿管和/或膀胱中的结石、碎石和/或其他对象。非侵入性手术的一个优点是可以利用人体的正常开口和通道。例如,在输尿管镜手术中,医生可以使内窥镜经过输尿管向结石移动,使取回装置的端部执行器(例如网篮)向结石前移,并使结石与端部执行器接合,以捕获对象,从而从体内移除。
许多非侵入性手术至少需要两名操作人员。例如,在输尿管镜手术中,第一使用者(例如,医生)可以控制内窥镜,而第二使用者(例如,医生的助手)控制取回装置。可能需要第三名操作人员来操纵端部执行器。需要多名操作人员增加了这些手术的成本和复杂性,并可能导致操作人员之间的沟通隔阂、手术期间的移动效率低下以及响应时间延迟。本公开的各方面解决了这些困难和/或已知治疗方法的其他方面。例如,本公开的一个方面是将取回装置和内窥镜的人体工程学和操作控制整合到单只手。另一个方面是允许将医疗装置的单一单件组装到内窥镜。
发明内容
本发明的实施例涉及一种被构造为附接到内窥镜装置的取回装置,该取回装置系统包括:手柄,该手柄包括被构造为将手柄联接到内窥镜装置的附接部分;轴,该轴包括驱动丝和护套,该轴联接到手柄,护套可经由手柄的致动器组件在驱动丝上在远侧位置与近侧位置之间移动,该致动器致动手柄的滑动器组件,该滑动器组件联接到护套并可相对于手柄的附接部分移动以使护套移动;以及可伸展的端部执行器,该端部执行器联接到驱动丝的远侧端部,该端部执行器可在收缩构型与伸展构型之间移动,当护套向远侧移动到远侧位置以覆盖端部执行器时处于收缩构型,当护套向近侧移动到近侧位置以露出端部执行器时处于伸展构型。
在一实施例中,手柄包括致动器组件,该致动器组件包括杠杆和臂,该臂被构造为使滑动器在第一位置与第二位置之间移动,该杠杆被构造为使臂围绕销旋转,使得臂的容纳在滑动器的狭槽内的销部分使滑动器沿着纵向滑动器轴线移动。
在一实施例中,附接部分与内窥镜装置可拆卸地接合。
在一实施例中,轴从联接到手柄的近侧端部延伸到被构造成定位在内窥镜装置的工作通道内的远侧端部。
在一实施例中,手柄附接部分经由引导构件联接到内窥镜装置,手柄相对于引导构件可移动。
在一实施例中,手柄附接部分包括杆,该杆的尺寸和形状设计成可滑动地接收在引导构件的通道内,使得手柄可相对于引导构件和内窥镜装置经由杆沿着通道的纵向轴线移动。
在一实施例中,引导构件包括在其外表面上的一个或更多个凹口,所述凹口被构造成接收手柄的楔形部分,以将手柄相对于引导构件锁定就位。
在一实施例中,所述一个或更多个凹口是倾斜的,以允许手柄的近侧运动,同时防止远侧运动。
在一实施例中,手柄可围绕引导构件旋转,以允许轴的更长长度在内窥镜装置的工作通道内移位。
本发明的实施例还涉及一种被构造为附接到内窥镜装置的取回装置,该取回手柄装置包括:被构造为将手柄联接到内窥镜装置的附接部分;可相对于手柄的附接部分移动的滑动器,以使联接到手柄的取回轴移动;以及包括杠杆和臂的致动器组件,该臂被构造为使滑动器在第一位置与第二位置之间移动,该杠杆可从第一位置移动到第二位置,以使臂围绕销旋转,使得臂的容纳在滑动器的狭槽内的销部分使滑动器沿着纵向滑动器轴线移动。
在一实施例中,附接部分与内窥镜装置可拆卸地接合。
在一实施例中,附接部分经由引导构件联接到内窥镜装置,手柄相对于引导构件可移动。
在一实施例中,附接部分包括杆,该杆的尺寸和形状设计成可滑动地接收在引导构件的通道内,使得手柄可相对于引导构件和内窥镜装置经由杆沿着通道的纵向轴线移动。
在一实施例中,手柄可绕引导件旋转,以允许轴的更长长度经过内窥镜装置的工作通道移位。
在一实施例中,手柄包括弹簧构件和第二弹簧构件,弹簧构件将杠杆偏压到第一位置并且具有将杠杆从第二位置移动到第一位置所需的回复力,第二弹簧构件经由柱塞将护套偏压到第一远侧位置并且具有将护套从第二位置移动到第一位置所需的回复力。
本发明的实施例还涉及一种取回组织的方法,该方法包括:将与内窥镜装置联接的取回装置的远侧部分插入活体的目标区域,取回装置的远侧部分的尺寸和形状设计成插入通过内窥镜装置的工作通道,该远侧部分包括轴和可伸展的端部执行器,该轴包括驱动丝和护套的轴,该轴联接到手柄,护套可经由手柄的致动器组件在驱动丝上在远侧位置与近侧位置之间移动,端部执行器联接到驱动丝的远侧端部,端部执行器可在收缩构型与伸展构型之间移动,当护套向远侧移动到远侧位置以覆盖端部执行器时处于收缩构型,当护套向近侧移动到近侧位置以露出端部执行器时处于伸展构型;致动手柄的致动器组件以使护套向近侧移动以露出端部执行器,从而允许端部执行器从收缩构型移动到伸展构型;经由端部执行器捕获组织;以及通过释放致动器组件而缩回端部执行器,使得护套向远侧移动以覆盖端部执行器,其中取回装置和内窥镜装置由单个使用者操作。
在一实施例中,致动器组件致动手柄的滑动器,该滑动器联接到轴并可相对于手柄移动,以使护套移动。
在一实施例中,致动器组件包括杠杆和臂,该臂被构造为使滑动器在第一位置与第二位置之间移动,杠杆可从第一位置移动到第二位置,以使臂围绕销旋转,使得臂的容纳在滑动器的狭槽内的销部分使滑动器沿着纵向滑动器轴线移动。
在一实施例中,手柄包括弹簧构件,该弹簧构件将杠杆偏压到第一位置,并且具有将杠杆从第二位置移动到第一位置所需的回复力。
在一实施例中,用一只手的食指操作手柄的致动器组件,使得内窥镜装置被握住,并且同时或独立地用同一只手的拇指操作内窥镜致动器。
附图说明
图1示出了根据本公开的第一示例性实施例的取回系统的侧视图;
图2示出了根据本公开的示例性实施例的图1的取回系统的手柄的侧视图;
图3示出了图1的取回系统的透视图;
图4示出了根据本公开的第二示例性实施例的取回系统的侧视图;
图5示出了图4的取回系统的另一侧视图;
图6示出了根据本公开的示例性实施例的图4的取回系统的手柄和引导件的侧视图;
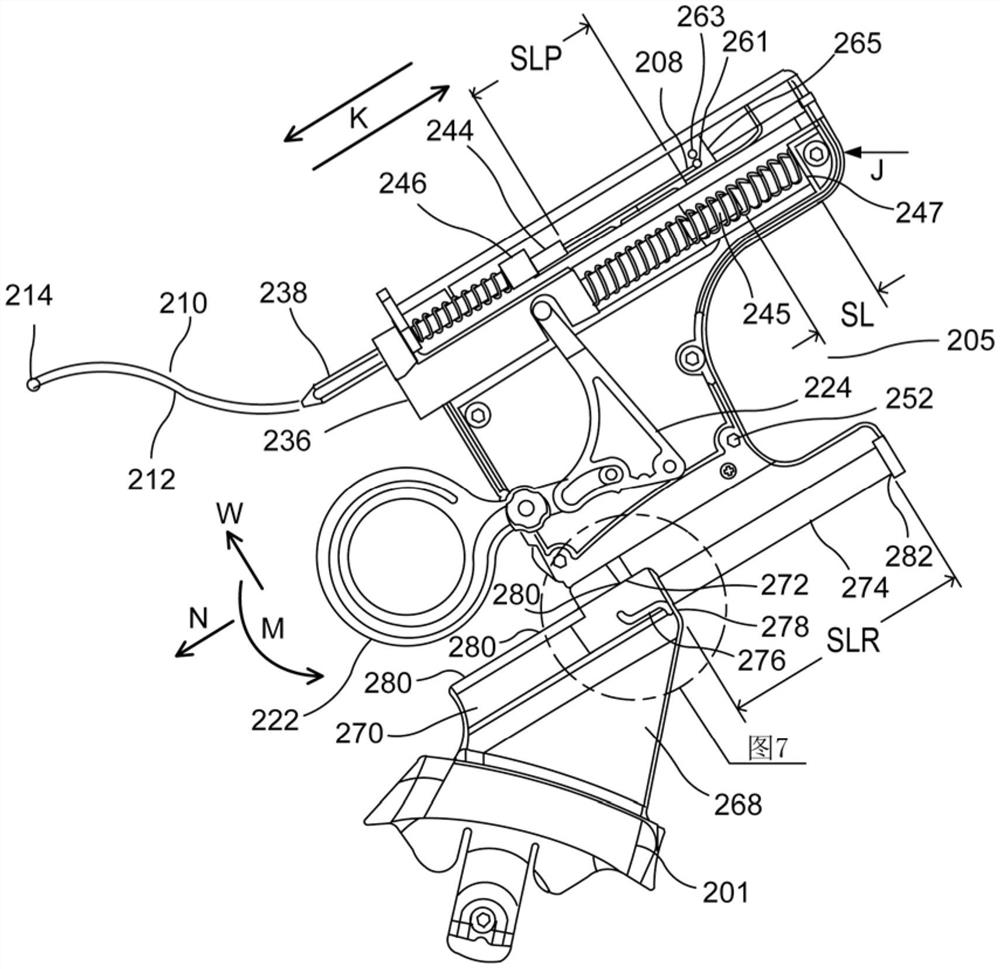
图7示出了图6的手柄的一部分的分解视图;
图8示出了图4的取回系统的手柄和引导件的相应的滑杆和通道的分解前视图;
图9示出了根据本公开的第三示例性实施例的取回系统的侧视图;
图10示出了图9的取回系统的手柄和引导件的侧视图;
图11示出了图9的取回系统的俯视图;
图12示出了根据本公开的第四示例性实施例的取回系统的侧视图;
图13示出了图11的取回系统的另一侧视图;
图14示出了根据本公开的示例性实施例的图11的取回系统的手柄和引导件的侧视图;
图15示出了根据本公开的第五示例性实施例的取回系统的侧视图;
图16示出了根据本公开的示例性实施例的图14的取回系统的手柄和引导件的侧视图;以及
图17示出了根据本公开的示例性实施例的图14的取回系统的引导件的侧视图。
具体实施方式
参考附图和以下描述,可以进一步理解本公开,其中相同的元件用相同的附图标记表示。本公开涉及用于取回材料(例如,活体内的组织)的取回装置和方法。具体而言,本发明涉及一种取回装置,其可以容易地与输尿管镜装置(比如LithoVue
参考图1-图3,取回系统100包括内窥镜101和取回装置103。取回装置103包括手柄组件105和端部执行器组件107。如图所示,手柄组件105被构造成附接到内窥镜101。内窥镜101可以包括被构造成用于微创手术中的任何内窥镜,例如商标名称为LithoVue
端部执行器组件107包括由驱动丝108和护套112组成的轴110、以及附接到驱动丝108的远侧端部的端部执行器114。护套112的尺寸和形状设计成覆盖并滑过端部执行器114和驱动丝108的一部分。护套112的长度基本上与驱动丝108加上足够的额外长度以覆盖端部执行器114的长度相同。在示例性实施例中,包括驱动丝108和护套112在内的轴110的长度并不显著延伸超出内窥镜工作通道106的远侧端部。这允许轴110在手柄组件105与内窥镜101的工作通道106之间基本上变成直线,从而形成真正的不缩回的端部执行器。然而,在其他实施例中,轴110可以显著长于内窥镜工作通道106。在该实施例中,轴110可以盘绕成圈,如图1所示。在另一示例中,轴110可以仅稍微长于内窥镜的工作通道106。在该实施例中,轴110的松弛可以作为凸起移位,如图3所示。如果具有额外的长度,则轴110的从工作通道106的远侧端部延伸的长度可以在手柄组件105的近侧端部处由使用者的没有抓握手柄组件105的手来调节。在该实施例中,端部执行器114是由形状记忆材料制成的可自伸展网篮,类似于Boston
如图2最佳所见,手柄组件105包括手柄主体116,该手柄主体包括两个盖件118。手柄主体116经由驱动丝108联接到轴110,并且包括致动器组件120,该致动器组件包括杠杆122和臂124。致动器组件120被构造为经由柱塞、第一弹簧和滑动组件使护套112相对于端部执行器114移动,以覆盖和收缩端部执行器114或者暴露和伸展端部执行器114。具体地,为了缩回护套112,杠杆122在围绕第一销126顺时针的箭头M方向被压下,导致第二销128在臂124的狭槽130中逆时针旋转。第二销128在狭槽130内的这种运动导致臂124围绕第三销132顺时针旋转,这进而使臂124的销部分134向近侧旋转。
如图2可见,臂124的销部分134位于滑动器136的狭槽135内,滑动器可相对于手柄主体116向近侧和向远侧移动。因此,臂124的销部分134的旋转运动导致滑动器136向近侧和向远侧移动,这进而使联接至弹簧偏压的柱塞138的护套112缩回,使移动护套112向近侧移动以伸展端部执行器114,或者向远侧移动以收缩端部执行器114。具体而言,销部分134的近侧运动使滑动器136向近侧移动,经由从滑动器136延伸的壁140拉动柱塞138,并拉动附接的护套112以露出端部执行器114,从而允许其伸展。如图2所示,柱塞138可以为具有两个平坦侧面139的大致圆柱形,并且其尺寸和形状设计成在通道141中滑动,所述通道具有匹配的轮廓并延伸穿过壁140。柱塞138还包括扳机142,扳机的尺寸和形状设计成经由使用者的拇指或手指移动穿过手柄主体116中的上部开口143。支撑管144从柱塞138的近侧端部向近侧延伸,并且其尺寸和形状设计成滑动穿过块体146。第一压缩弹簧148围绕支撑管144的外径在柱塞138的近侧端部与块体146的远侧端部之间以压缩状态定位。第一弹簧148处于其初始高度,并施加初始回复力以将护套112偏压至正常远侧位置,使得扳机142的远侧侧面邻接壁140。
第一弹簧148最常用于防止损坏脆弱的端部执行器114和护套112,比如Zero Tip
杠杆122的完全压下同时导致联接到滑动器136的近侧端部的行程限制器145的近侧端部到达手柄组件105的近侧壁147。当行程限制器145邻接近侧壁147时,护套112不能经由杠杆122进一步缩回,并且端部执行器114在此时功能性地打开。因此,手柄105具有由行程限制器145的近侧端部与近侧壁147的远侧面之间的距离确定的端部执行器行程长度SL。然而,在一些实施例中,端部执行器114,比如Dakota
当杠杆122上的手动力被移除并且没有负载(即,肾结石、组织、异物等)被捕获时,杠杆122、护套112、柱塞138、滑动器136和臂124返回到它们的初始位置(即,端部执行器114被护套112覆盖的位置)。第二弹簧150在近侧壁147与滑动器136的近侧端部之间位于行程限制器145周围,当手动力从杠杆122上移除时,第二弹簧提供使每个元件返回到其起始位置所需的回复力。第二弹簧150选择成比第一弹簧148更刚硬。因此,第二弹簧150被构造成提供比足以闭合端部执行器114的力更大的力,而第一弹簧148控制力的具体大小(即,闭合端部执行器、捕获碎片或切割负载)。当手动力从杠杆122上移除时,被滑动器136从其初始长度压缩的第二弹簧150的回复力迫使滑动器136回到其初始远侧位置,从而迫使弹簧148、偏压的柱塞138、护套112和臂124回到它们的初始位置(即,没有负载的位置)。也就是说,第二弹簧150的回复力提供了经由柱塞138的近侧端部施加在端部执行器114上和/或经由第一弹簧148施加在护套112上的力,用于闭合、捕获或勒住负载(即,第二负载位置)。第一弹簧148的刚度被预先选择成例如增加端部执行器114的耐用性,控制端部执行器抓持结石负载的具体大小,或者控制组织切割期间的勒住力。如本领域技术人员所理解的,弹簧将在给定的弹簧变形下施加已知的力(胡克定律)。相反,施加到端部执行器114的手动力依赖于例如使用者的触觉来估计施加的力的大小,并且可能因人而异。如果需要进一步闭合/覆盖端部执行器114,可以向远侧移动柱塞138的扳机142,使护套112在端部执行器114上进一步向远侧移动,以例如在曲折的路径中捕获小的结石或碎片。
在示例性实施例中,手柄组件105被构造成没有第一弹簧148。在这种实施例中,第二弹簧150将其回复力直接施加到端部执行器114,简化了手柄组件105的机械结构。在这种实施例的一个示例中,柱塞138和支撑管144被胶合或以其他方式联接到滑动器136。在另一示例中,滑动器136与柱塞138和支撑管144一起模制,以形成单个零件。在该示例中,第一弹簧148和扳机142都被移除。应当理解,这些实施例允许更简单的手柄组件105,具有更少的涉及护套112的延伸和缩回的零部件,并且不会具有第一弹簧148的益处。
通过将盖件118的第一销152定位到内窥镜主体102的螺纹孔154中,并将盖件118的第二销156卡入到内窥镜主体102的偏转旋钮159的中心孔157中,手柄组件105可以在附接部分153处可移除地附接到内窥镜101。为了从内窥镜主体102释放手柄组件105,首先从中心孔157移除第二盖件销156,随后从螺纹孔154移除第一盖件销152。
驱动丝108从手柄组件105的远侧端部延伸穿过柱塞138,穿过手柄内腔161,到达位于手柄20的近侧端部的旋钮160。在该实施例中,驱动丝108通过固定螺钉162附接到旋钮160。手柄套管164(比如不锈钢海波管)用于将驱动丝108的近侧端部套在手柄组件105内,以增加驱动丝108的刚度,防止当手柄组件105的部件在驱动丝108上操纵时扭结。旋钮160可以围绕通过将手柄盖件118装配在一起而形成的孔166旋转。旋钮160在孔166内的旋转使驱动丝108旋转,并因此使附接到驱动丝的远侧端部的端部执行器114旋转。
在示例性实施例中,手柄组件105可以包括电外科特征。例如,活动插头可以在旋钮160近侧连接到驱动丝114的近侧端部。在另一示例中,如果不需要端部执行器114的旋转,则活动插头可以代替旋钮160定位在手柄组件105的近侧端部处。
在图4-图8中示出了根据本公开的另一示例性实施例的取回系统200。除了下文描述的以外,取回系统200基本上类似于取回系统100,其包括内窥镜201和取回装置203,该取回装置包括手柄组件205和端部执行器组件207。具体而言,手柄组件205可经由引导件268相对于内窥镜201移动,这将在下面进一步详细描述。
在该实施例中,手柄组件205包括360度闭合的杠杆环222,代替手柄组件105中的杠杆122。图6示出了处于未压下状态的杠杆环222,使得滑动器236、柱塞238、臂224和轴210处于它们的远侧位置,其中端部执行器214处于闭合或收缩位置。手柄组件205具有由行程限制器245的近侧端部与近侧壁247的远侧面之间的距离确定的端部执行器行程长度SL。类似于柱塞138,柱塞238具有行程长度SLP,该行程长度由支撑管244的近侧端部与锚固块体246的远侧端部之间的距离确定。因此,行程长度SL和SLP可以分别通过将行程限制器245和支撑管244切割成预定长度来定制尺寸。
在该实施例中,滑动机构允许手柄组件205相对于内窥镜205向近侧和向远侧滑动。具体而言,该实施例的手柄组件205包括利用盖件销252和256(如上文关于盖件销152、156所描述的)安装在内窥镜30上的引导件268。引导件268包括相对于内窥镜201以优选角度定位的通道270。通道270通向沿着其长度延伸的狭槽272。在优选实施例中,通道270具有圆形轮廓,该圆形轮廓被构造成例如与位于手柄主体216上的圆形杆274的外轮廓匹配。因此,手柄205可相对于引导件268和内窥镜201经由在通道270内可滑动的圆形杆274沿着通道270的纵向轴线移动。在一实施例中,杆274包括悬臂闩锁276,该悬臂闩锁被构造成锁定到引导件268的近侧壁278。一旦杆274和闩锁276已经穿过壁278向远侧插入通道中,悬臂闩锁276就防止杆274向近侧滑出通道270。在示例性实施例中,杆274具有的直径略小于通道270的内径,使得两个部件之间存在平滑的界面。然而,在另一实施例中,通道270具有的直径可以略小于杆274的外径,从而在杆274与通道270之间形成过盈配合。本领域技术人员将理解,虽然本实施例的杆274和通道270具有圆形轮廓,但是可以使用任何形状轮廓,比如例如正方形、椭圆形、多边形等。此外,杆274与通道270之间的界面可以包括锁定机构,如下面进一步详细描述的。
仍然参见图6,该实施例的杆274被制成为具有比引导件268的通道270相对较小的直径,允许手柄组件205相对于引导件268在箭头M的方向上翘起或倾斜。具体地,手柄组件205包括与引导件268相互作用的楔形部分279,使得由于通道270的角度和手柄组件205的质心,使用者可以利用杠杆环222使手柄组件205倾斜。引导件268在其外表面上包括三个凹口280,其被构造成接收手柄205的楔形部分279,将手柄组件205相对于引导件268和内窥镜201锁定就位。具有360度闭合环的杠杆环222允许使用者用例如食指的指甲侧提起环222,以沿箭头W的方向提起手柄组件205,如图6所示。杠杆环222以及因此手柄组件205的这种提起使楔形部分279移出凹口280,允许手柄组件205相对于引导件268向近侧或向远侧滑动。从图7中可以看出,该实施例的凹口280可以是斜坡形的,每个凹口280的深度沿远侧方向增加。因此,手柄组件205能够向近侧移动,而不会被提起离开凹口280。然而,在其他实施例中,凹口280可以基本上为U形的,使得手柄组件205必须被提起以将楔形部分279从凹口280中释放并使手柄组件205移动。从图6中可以看出,杆274可以包括具有比杆274和通道270更大的直径的近侧止动部282。止动部282通过邻接抵靠通道270的近侧表面来防止杆274向近侧滑出通道270。
手柄组件205相对于引导件268的运动(即,经由滑动)使护套212、驱动丝208和端部执行器214移动相应且相等的距离和方向。例如,在最近侧位置,杆的行程长度SLR被限定为将护套212的远侧末端和端部执行器214定位成与内窥镜工作通道206的远侧端部齐平。当手柄组件205向远侧移动使得SLR等于零时,护套212的末端和端部执行器214从插入装置工作通道206的端部延伸距离SLR。
参考图3,可以看出,手柄组件205朝向内窥镜10的T形连接器284成角度。在优选实施例中,该角度允许在柱塞238与T形连接器284之间的轴中没有松弛。因此,护套212的缩回以打开端部执行器214或者护套212的延伸以闭合/收缩端部执行器214将导致真正的不缩回的端部执行器214,这是因为驱动丝214与护套212之间的整个往复运动仅由护套212传递,而端部执行器214保持静止。
在示例性实施例中,取回装置203的手柄组件205不包括端部执行器旋转特征(即,旋钮)。相反,在该实施例中,当驱动丝208从手柄内腔261弯曲并进入第二内腔263以将驱动丝208固定就位时,驱动丝208的近侧端部被固定到块体246。在组装期间,驱动丝208可以被修剪到预定长度,以允许手柄主体216的突部(tab)265推动并弯曲驱动丝208的近侧端部,将其固定就位。
图9-图11中示出了根据本公开的另一示例性实施例的取回组件200'。除了下文描述的以外,取回组件200'基本上类似于取回组件200。具体地,取回组件200'的取回装置203'的轴210'可与手柄组件205'和手柄主体216'分离,并且包括从其向近侧延伸的轴手柄211'。也就是说,轴手柄211'被构造成使得它可以被夹持在手柄组件205'的轴手柄附接部分213'中。从图10中可以看出,手柄组件205'包括形成手柄组件205'的轴手柄附接部分213'的两个夹具286'。轴手柄211'可以是例如
图12-图14中示出了根据本公开的另一示例性实施例的取回组件300。除了下文描述的以外,取回组件300基本上类似于取回组件200。具体而言,该实施例的手柄组件305被构造成绕引导件368旋转,从而允许轴310的更长长度在内窥镜301的工作通道306内移位并移出内窥镜301的远侧端部。图12-图13示出了经由引导件368联接到内窥镜301的手柄组件305。该实施例的轴310包括外护套312和驱动丝308,该驱动丝在近侧端部用海波管364加强。海波管364从手柄组件305的内部延伸到T形连接器384的内部。近侧轴310中刚度的这种增加有助于使轴310前移进入T形连接器384中,使得当手柄组件305朝向T形连接器384旋转时,轴310拉直或变成直线。图12示出了处于缩回的轴位置的手柄组件305,其中轴310的远侧末端刚好位于内窥镜工作通道306的远侧偏转区域的近侧。然而,在该实施例中,使杠杆环322沿箭头M的方向移动,如图13所示,使得手柄组件305以及所附接的轴310朝向T形连接器384旋转,使得轴310的远侧末端在内窥镜301的工作通道306中前移,并最终离开工作通道306的远侧端部。
具体地,该实施例的引导件368包括圆形表面388,其中销390与手柄组件305的弧形狭槽392接合,并且销398提供旋转轴。当手柄组件305联接到引导件368时,销390定位在狭槽392内,从而可沿着狭槽的长度滑动,以使手柄组件305旋转,使得手柄组件305与内窥镜301之间的角度增大或减小。手柄组件305与内窥镜301之间的角度可以增大或减小的程度受狭槽392的长度的限制。在该实施例中,当销390邻接狭槽392的近侧端部时,手柄组件305成角度,使得在柱塞338与T形连接器384之间形成直线。因此,轴310被拉直(即,没有任何松弛),并且取回装置303包括真正的不缩回的端部执行器/网篮。手柄组件305相对于引导件368的角度由环杠杆322控制。该实施例的环杠杆322包括销394,其中刚好近侧的表面395被构造成邻接止动部或凸缘396。图14示出了邻接止动部396的销394。此时,手柄组件305与内窥镜301之间的角度最小,其中销394邻接狭槽392的近侧端部。当销394和止动部396邻接时,杠杆322围绕销394在箭头M的方向上的进一步运动使滑动器336和附接的护套312在近侧方向上移动,以打开端部执行器314。当手动力被移除时,杠杆环322和第二弹簧350使端部执行器314返回到闭合位置以捕获负载。通过使杠杆环322沿箭头M的相反方向移动,轴310从内窥镜301的远侧端部缩回。当销390邻接狭槽392的远侧端部时,发生装置轴310和手柄组件305的最大缩回。
图14-图17中示出了根据本公开的另一示例性实施例的取回组件400。除了下文描述的以外,取回装置400基本上类似于取回组件300。在该实施例中,轴410可经由手柄组件405旋转地和线性地运动。具体地,这两种运动按顺序使用,其中第一旋转运动用于轴410的总的/大的粗略的延伸,并且第二线性运动用于轴410的细微调整。细微调整可以用来将端部执行器414定位成更靠近例如肾结石,而无需移动内窥镜护套404。
类似于取回装置300的实施例,如上所述,驱动丝408的近侧端部由海波管464支撑。通过使杠杆环422在箭头M的方向上移动,以使手柄组件405以及附接的轴410朝向T形连接器旋转并进入T形连接器484中,轴410的远侧末端可以前移通过内窥镜401的工作通道406,并最终离开内窥镜护套404的远侧端部。然而,在该实施例中,手柄主体416位于引导件468上方,并经由穿过引导件468中的细长狭槽499的销498联接到引导件468。从图17可以看出,细长狭槽499是成角度的,使得当引导件468联接到内窥镜401时,狭槽499朝向内窥镜401的T形连接器484延伸。销498与狭槽499的这种配合允许使用者将杠杆环422沿箭头N的方向(或与箭头N相反的方向)移动到最大极限,在该最大极限处,销498邻接细长狭槽499的远侧(或近侧)端部,以对轴410在内窥镜工作通道406中的位置进行细微调整。具体而言,在该实施例中,凸缘496上的齿与销494下方的表面495上的齿可以接合,以保持轴前移或后退的N方向。杠杆环422沿箭头M的方向被压下,以在护套412沿箭头N的方向移动期间或之后打开端部执行器414。当手动力从杠杆环422上移除时,第二弹簧450将使端部执行器414返回到闭合位置或捕获负载。然后,在手柄组件405可以旋转回到图15的缩回的装置轴410的位置之前,销498返回到狭槽499内的中心位置。
虽然本公开描述了用来接合肾脏、输尿管和/或膀胱中的结石、碎石和/或其他异物的取回装置的使用,但是涉及特定类型的手术,比如输尿管镜术;装置,比如取回装置;端部执行器,比如网篮;器官,比如肾脏;和/或对象,比如结石或碎石,这是为了方便而提供的,并不旨在限制本公开。此外,本文讨论的手柄组件可以被构造成前移或缩回激光光纤,以及同时或独立地操作两个或更多个医疗装置。手柄组件还可以被构造成前移或缩回注射针,所述注射针在其近侧端部具有医用鲁尔接口连接器。因此,本文描述的概念可以用于任何类似的装置或系统。
本领域技术人员将会理解,在不脱离本发明概念的情况下,可以对上述实施例进行改变。还应当理解,与一个实施例相关联的结构特征和方法可以结合到其他实施例中。因此,应当理解,本发明不限于所公开的特定实施例,而是修改也涵盖在由所附权利要求所限定的本发明的范围内。
- 医用刨削手柄及用于医用刨削手柄的电机组件
- 一种便于测压的医用测压手柄及医用测压仪