基于机械视觉及AI技术的平衡车自动跟随实现方法及系统
文献发布时间:2023-06-19 10:08:35
技术领域
本发明涉及机械视觉及AI自动识别技术领域,具体地说是一种基于机械视觉及AI技术的平衡车自动跟随实现方法及系统。
背景技术
随着物联网技术的普及,人们的生活方式有了翻天覆地的变化,越来越多的智能设备进入到人们的生活中,近几年,一种新型的代步工具平衡车应运而生,平衡车为大家近距离出行、园区观光、逛商场等活动提供了便利,但平衡车重量较大,下车后只能手提携带,对于女士、儿童来说反而成为负担,同时存在安全风险,故如何实现对平衡车主人的识别,进而实现平衡车对车主的自动跟随,减轻女士和儿童的携带平衡车的负担,同时提高安全性是目前亟待解决的技术问题。
发明内容
本发明的技术任务是提供一种基于机械视觉及AI技术的平衡车自动跟随实现方法及系统,来解决如何实现对平衡车主人的识别,进而实现平衡车对车主的自动跟随,减轻女士和儿童的携带平衡车的负担,同时提高安全性的问题。
本发明的技术任务是按以下方式实现的,一种基于机械视觉及AI技术的平衡车自动跟随实现方法,该方法是通过机械视觉技术搭载GPU离线训练平台,实现AI自动识别,进而驱动平衡车制动系统实现平衡车的自动跟随;具体如下:
视频采集模块采集车主样本数据,对车主样本数据进行样本特征提取获得样本特征值并存储,后续训练过程中不断对样本特征值进行更新;
平衡车开启跟随模式,视频采集模块采集车主实时数据,并对实时数据进行特征值提取获得实时数据特征值;
将实时数据特征值与样本特征值进行对比,并判断是否符合:
若不符合,则视频采集模块重新采集实时数据;
若符合,则通过计算平台计算运行轨迹,并根据运行轨迹输出制动命令到制动模块;
制动模块控制平衡车按照轨迹行驶,进而实现平衡车跟随模式。
作为优选,所述计算平台为主控平台,用于运行旷世机器视觉平台,孔子平衡车制动系统,实时收集视频信息并完成样本对比,计算车主运行轨迹。
作为优选,所述计算平台采用华为麒麟ARM8嵌入式CPU,搭载NVIDIA GPU模块。
作为优选,所述视觉采集模块采用松下720P高清数字摄像头模组。
作为优选,所述制动模块采用松下数字制动系统。
更优地,所述车主样本数据包括车主的体型和动作习惯。
一种基于机械视觉及AI技术的平衡车自动跟随系统,该系统包括视频采集模块、计算平台、旷视机器视觉平台和制动模块,视频采集模块实时采集车主的体型和动作习惯,并上传到计算平台;计算平台存储车主的体型和动作习惯作为车主样本数据,并运行旷世机器视觉平台;旷视机器视觉平台将车主样本数据与实时数据进行对比,进而判断车主的运行轨迹,并下发制动命令给制动模块,驱动制动模块按照轨迹巡行,进而实现平衡车的自动跟随。
作为优选,所述计算平台采用华为麒麟ARM8嵌入式CPU,搭载NVIDIA GPU模块。
作为优选,所述视觉采集模块采用松下720P高清数字摄像头模组。
更优地,所述制动模块采用松下数字制动系统。
本发明的基于机械视觉及AI技术的平衡车自动跟随实现方法及系统具有以下优点:本发明通过机械视觉技术搭载GPU离线训练平台,实现AI自动识别,即实现对平衡车车主的识别,进而驱动平衡车制动系统,实现平衡车的自动跟随,减轻女士和儿童携带压力,提高安全性。
附图说明
下面结合附图对本发明进一步说明。
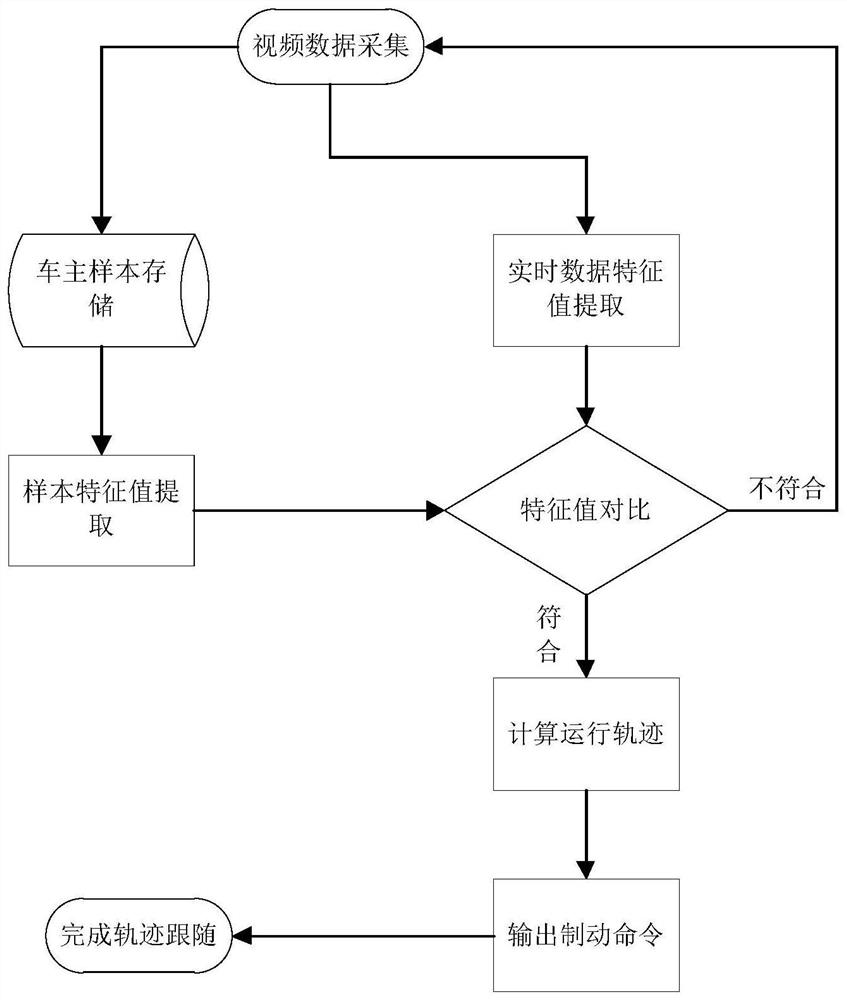
附图1为基于机械视觉及AI技术的平衡车自动跟随实现方法的流程框图;
附图2为于机械视觉及AI技术的平衡车自动跟随系统的结构框图。
具体实施方式
参照说明书附图和具体实施例对本发明的基于机械视觉及AI技术的平衡车自动跟随实现方法及系统作以下详细地说明。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述。而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例1:
如附图1所示,本发明的基于机械视觉及AI技术的平衡车自动跟随实现方法,该方法是通过机械视觉技术搭载GPU离线训练平台,实现AI自动识别,进而驱动平衡车制动系统实现平衡车的自动跟随;具体如下:
S1、视频采集模块采集车主样本数据,对车主样本数据进行样本特征提取获得样本特征值并存储,后续训练过程中不断对样本特征值进行更新;
S2、平衡车开启跟随模式,视频采集模块采集车主实时数据,并对实时数据进行特征值提取获得实时数据特征值;
S3、将实时数据特征值与样本特征值进行对比,并判断是否符合:
①、若不符合,则跳转至步骤S1;
②、若符合,则执行步骤S4;
S4、通过计算平台计算运行轨迹,并根据运行轨迹输出制动命令到制动模块;
S5、制动模块控制平衡车按照轨迹行驶,进而实现平衡车跟随模式。
本实施例中的车主样本数据包括车主的体型和动作习惯。
本实施例中计算平台为主控平台,用于运行旷世机器视觉平台,孔子平衡车制动系统,实时收集视频信息并完成样本对比,计算车主运行轨迹。其中,旷视机器视觉平台,旷视是国内最大的AI训练平台尤其是机器视觉领域,本次选用的为旷视轻量级离线训练平台。
本实施例中计算平台采用华为麒麟ARM8嵌入式CPU,搭载NVIDIA GPU模块,也可用其他同规格平台。
本实施例中视觉采集模块采用松下720P高清数字摄像头模组,也可用其他同规格产品。
本实施例中制动模块采用松下数字制动系统(数字可控直流无刷电机)。
实施例2:
如附图2所示,本发明的基于机械视觉及AI技术的平衡车自动跟随系统,该系统包括视频采集模块、计算平台、旷视机器视觉平台和制动模块,视频采集模块实时采集车主的体型和动作习惯,并上传到计算平台;计算平台存储车主的体型和动作习惯作为车主样本数据,并运行旷世机器视觉平台;旷视机器视觉平台将车主样本数据与实时数据进行对比,进而判断车主的运行轨迹,并下发制动命令给制动模块,驱动制动模块按照轨迹巡行,进而实现平衡车的自动跟随。
其中,计算平台采用华为麒麟ARM8嵌入式CPU,搭载NVIDIA GPU模块。视觉采集模块采用松下720P高清数字摄像头模组。制动模块采用松下数字制动系统。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 基于机械视觉及AI技术的平衡车自动跟随实现方法及系统
- 一种基于信号强度的平衡车跟随方法和系统