一种用于微结构的振动辅助磁性磨料抛光装置及方法
文献发布时间:2023-06-19 10:13:22
技术领域
本发明属于超精密领域加工范围,尤指一种用于微结构的振动辅助磁性磨料抛光装置及方法。
背景技术
随着工业水平的快速发展,对电子元件的表面质量加工要求越来越高,需要元件的表面粗糙度达到纳米级,而具有微结构的元件也开始要求具有高的面形精度,好的表面质量以及尽量减少亚表面破坏层,高的表面精度以及小的加工损伤层可以保证元件好的成像质量,较小的加工损伤层可以减小高能应用中的破坏,因此元件的性能在很大程度上取决于制造过程。其实现高质量超光滑的技术主要是抛光,其中磁性磨料抛光技术具有较低的亚表面损伤、较高的抛光精度等优点,因此在超精密光学元件的抛光过程中开启了大量的研究和发展。
哈尔滨工业大学的王慧君针对具有小曲率半径的凹曲面和自由曲面光学元件提出了超声波磁流变复合抛光,并建立了材料去除数学模型,研究表明,超声的作用能够增强抛光的机械作用和化学作用,超声波磁流变复合抛光的表面质量略低于普通的磁流变抛光,但材料去除率是普通磁流变抛光的3.1倍,抛光效率明显提高。印度新德里理工学院的Rahul S.Mulik等人用超声辅助双盘磁性磨料抛光方法对两种不同的顺磁性材料进行了实验研究,研究表明,在顺磁性材料上加入超声振动可以在较短的时间内获得更为理想的表面粗糙度,抛光前的铜合金和不锈钢试样的平均初始表面粗糙度达到0.37um和0.39um,抛光后的铜合金试样表面粗糙度可以达到36nm,不锈钢试样表面粗糙度可以达到44nm。
针对于以上问题,本装置提出在磁性磨料抛光的基础上引入振动辅助改变加工动态性能去改善光学元件的表面质量不高这一问题。其中大多数振动辅助加工机构仍然是谐振型,其工作原理是利用压电致动器将电能转换成机械能。但是谐振类型振动辅助机构也局限在特定的工作频率和较差的散热性。随着精密元件在航空航天、国防科技及光电通讯等领域的广泛应用,对其持续加工时间提出了更高的要求,然而这种要求与传统的加工方式不兼容。本项目提出了一种基于非谐振振动辅助加工机构的振动辅助磁性磨料抛光装置及方法,以扩展现有精密抛光装置的加工能力。因此该振动辅助加工技术在非谐振的基础上引入传统磁性磨料抛光技术具有极高的应用前景。
发明内容
本发明提供一种用于加工微结构的振动辅助磁性磨料抛光装置及方法,以解决传统磁性磨料抛光技术抛光效率低等问题。
本发明采取的如下技术方案是:一种用于加工微结构的振动辅助磁性磨料抛光装置,包括Z向运动导轨、Y向运动导轨、X向运动导轨、抛光刀具运动平台、微振动器、强磁铁运动机构、基座和被抛光工件,被抛光工件固定在微振动器上,Y向运动导轨安装在底座上,X向运动导轨安装在龙门架上,Z向运动导轨通过螺纹连接与X向运动导轨连接,抛光刀具运动台通过螺纹连接与Z向运动导轨连接,微振动器通过螺纹与Y向运动导轨连接,强磁铁运动机构与Y向运动导轨连接。
所述抛光刀具运动台包括:气浮主轴、抛光刀具和配重气缸,配重气缸安装在Z向运动导轨上,气浮主轴安装在配重气缸上,抛光刀具装卡在气浮主轴上;
所述的抛光刀头包括永久磁铁、铝制挡板和抛光刀体,永久磁铁安装在抛光刀具刀头内部并用铝制挡板固定,铝制挡板通过强力胶固定在抛光刀体上。
所述的强磁铁运动机构包括强磁铁、底板、滑动导轨、伺服电机、电机支撑板、联轴器、轴承座一、滚珠丝杠、精密滑台和轴承座二,电机支撑板通过螺纹连接与底板连接,伺服电机通过螺纹连接与电机支撑板连接,精密导轨通过螺纹连接与底板连接,轴承座一与轴承座二通过螺纹连接与底板连接,滚珠丝杠通过联轴器与伺服电机连接并安装在轴承座一与轴承座二之间,精密滑台安装在滚珠丝杠与滑动导轨上,强磁铁安装在精密滑台上。
所述的微振动器包括支持台、微振动平台、传感器装置一和传感器装置二,微振动平台通过螺纹连接安装在支持台上,传感器装置一和传感器装置二安装在微振动平台上。
所述的微振动平台包括X向振动装置、Y向振动装置、工作平台、解耦机构和微动装置框架,X向振动装置安装在工作平台上,Y向振动装置安装在工作平台上,四个解耦机构固定在微动装置框架上且相对于工作平台的X向与Y向输出轴线对称分布。
所述的X向振动装置与Y向振动装置结构相同,以X向振动装置为例,其特征在于:包括预紧螺钉一、压电驱动器一、刚性梁一、位移传递块一、位移传递块二、柔性杠杆位移放大器一、柔性杠杆位移放大器二、连杆一、连杆二、柔性杠杆位移放大器三、柔性杠杆位移放大器四、位移传递快三和位移传递快四,压电驱动器一通过预紧螺钉一安装在位移传递块与刚性梁之间,柔性杠杆位移放大器一和柔性杠杆位移放大器二用于放大压电驱动器一产生的X 向位移,放大后的位移通过连杆三和连杆四传递给柔性杠杆位移放大器三和柔性杠杆位移放大器四,柔性杠杆位移放大器三和柔性杠杆位移放大器四再次将X向位移放大,传递给位移传递块三和位移传递块四,最后将X向位移传递给运动平台;Y向振动装置包括预紧螺钉二、压电驱动器二、刚性梁二、位移传递块五、位移传递块二、柔性杠杆位移放大器五、柔性杠杆位移放大器六、连杆三、连杆四、柔性杠杆位移放大器七、柔性杠杆位移放大器八、位移传递快五和位移传递快六,压电陶瓷二通过预紧螺钉二安装在位移传递块与刚性梁之间,柔性杠杆位移放大器一和柔性杠杆位移放大器二用于放大压电陶瓷二产生的Y 向位移,放大后的位移通过连杆三和连杆四传递给柔性杠杆位移放大器五和柔性杠杆位移放大器六,柔性杠杆位移放大器五和柔性杠杆位移放大器六再次将Y向位移放大,传递给位移传递块五和位移传递块六,最后将Y向位移传递给运动平台。
所述的解耦机构包括:Y向解耦机构、X向解耦机构,X向解耦机构包括柔性杠杆三、柔性杠杆四、位移传递块十一和位移传递块十二,其中X向解耦机构和Y向解耦机构相同,以X向解耦机构为例,当X向导向机构产生X向位移时,柔性杠杆三和柔性杠杆四跟随工作台运动,当Y向导向机构产生Y向位移时,位移传递块十一和位移传递块十二约束工作台避免产生Y向位移。
所述的传感器装置一包括位移传感器一和位移传感器支架一,位移传感器一通过螺纹连接固定在位移传感器支架一上,位移传感器支架一通过螺纹连接固定在微振动平台上。
所述的传感器装置二包括位移传感器二和位移传感器支架二,位移传感器二通过螺纹连接固定在位移传感器支架二上,位移传感器支架二通过螺纹连接固定在微振动平台上。
X向振动装置与Y向振动装置连接在解耦机构上,X向振动装置驱动工作平台产生X向位移,Y向振动装置驱动单元工作平台产生Y向位移,解耦机构能够消除XY轴向的寄生位移,降低运动耦合,减少连接平台的运动误差。
所述的基座包括:底座和龙门架,龙门架刚性连接于底座上。
本发明具有以下优点:
(1)、本发明提出了一种用于加工微结构的振动辅助磁性磨料抛光装置,利用振动平台使被抛光工件产生二维振动,与超声振动辅助磁性磨料抛光相比,被抛光工件的二维振动解决了磁性磨料的团聚现象,使磨料分布更均匀,提高了微结构的形貌精度,而且附加的二维振动使磁性磨料中的磨粒形成均匀可控的切削轨迹,多个磨粒的切削轨迹相互叠加,从而令抛光工件表面的缺陷降低,提高了抛光精度。切削轨迹又使磨粒在多个方向上形成切削刃,提高了抛光效率;
(2)、本发明设计了一种基于非谐振振动辅助加工机构,与超声振动辅助磁性磨料抛光相比,解决了散热性能差、频率不可调等问题,该非谐振振动辅助抛光机构采用压电陶瓷致动,可以在大范围的连续频率下工作,通过平台对致动器的输入位移进行放大,在提高抛光效率的同时,也扩展了现有精密抛光装置的加工能力;通过对振动频率的调节,可以改善工件的抛光面型精度;
(3)、本发明设计了一种磁场发生机构,被抛光工件在强磁铁和抛光杆之间的磁场之中,加大了对工件的去除,使装置的抛光效率更高。磨料在动态磁场的作用下产生运动变化,该运动不仅使磨料分散均匀,而且对磨料也有搅拌的效果,实现磨料的循环和更新,提高了研磨剂的稳定性;
(4)、本发明设计了一种振动平台,具有良好解耦功能和较大的输出位移,X向驱动单元产生的X向位移与Y向驱动单元产生的Y向位移互不干扰,提高了被抛光工件运动轨迹的准确性和被抛光工件表面的稳定性;振动辅助工作台的引入不仅可以使磁性磨料分布更均匀,还可以加大磁性磨料对工件的切向力,增加抛光效率的同时也保证了研磨的稳定性。
附图说明:
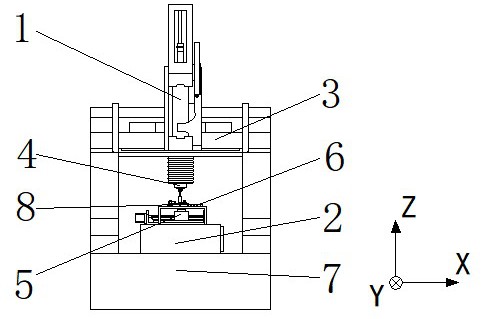
图1是本发明装置的结构示意图;
图2是本发明抛光刀具运动平台的结构示意图;
图3是抛光刀具运动平台中抛光刀具的剖视图;
图4是本发明强磁铁运动机构的结构示意图;
图5是本发明微振动器的结构示意图;
图6是微振动器中微振动平台的结构示意图;
图7是微振动平台中X向振动装置与Y向振动装置的结构示意图;
图8是微振动平台中解耦机构的结构示意图;
图9是微振动平台中传感器装置一与传感器装置二的结构示意图;
图10是微振动平台中工作平台的运动轨迹示意图;
图11是本发明基座的结构示意图;
图12是本发明工作原理示意图。
附图标记说明:Z向运动导轨1、Y向运动导轨2、X向运动导轨3、抛光刀具运动平台4、强磁铁运动机构5、微振动器6、基座7、被抛光工件8 、气浮主轴401、抛光刀具402、配重气缸403、永久磁铁40201、铝制挡板40202、抛光刀体40203、强磁铁501、底板502、滑动导轨503、伺服电机504、电机支撑板505、联轴器506、轴承座一507、滚珠丝杠508、精密滑台509、轴承座二510、支持台601、微振动平台602、X向振动装置60201、Y向振动装置60202、工作平台60203、解耦机构60204、微动装置框架60205、传感器装置一603、传感器装置二604、预紧螺钉一6020101、压电驱动器一6020102、刚性梁一6020103、位移传递块一6020104、位移传递块二6020105、柔性杠杆位移放大器一6020106、柔性杠杆位移放大器二6020107、连杆一6020108、连杆二6020109、柔性杠杆位移放大器三6020110、柔性杠杆位移放大器四6020111、位移传递快三6020112、位移传递快四6020113、预紧螺钉二6020201、压电驱动器二6020202、刚性梁二6020203、位移传递块五6020204、位移传递块六6020205、柔性杠杆位移放大器五6020206、柔性杠杆位移放大器六6020207、连杆三6020208、连杆四6020209、柔性杠杆位移放大器七6020210、柔性杠杆位移放大器八6020211、位移传递快五6020212、位移传递快六6020213、解耦杠杆一6020401、解耦杠杆二6020402、解耦连杆一6020403、解耦连杆二6020404、位移传感器一60301、位移传感器支架一60302、位移传感器二60401、位移传感器支架二60402、底座701和龙门架702。
具体实施方案
如图1所示,一种用于加工微结构的振动辅助磁性磨料抛光装置包括:Z向运动导轨1、Y向运动导轨2、X向运动导轨3、抛光刀具运动平台4、强磁铁运动机构5、微振动器6、基座7和被抛光工件8,被抛光工件8固定在微振动器6上,Y向运动导轨2安装在基座7上,X向运动导轨3安装在基座7上,Z向运动导轨1通过螺纹连接与X向运动导轨3连接,抛光刀具运动平台4通过螺纹连接与Z向运动导轨1连接,微振动器6通过螺纹连接与Y向运动导轨2连接,强磁铁运动机构5通过螺纹连接与Y向运动导轨2连接。
Z向运动导轨1、Y向运动导轨2与X向运动导轨3均为气浮式直线伺服导轨,Y向运动导轨2带动微振动器6和强磁铁运动机构5沿Y轴运动,Z向运动导轨1带动抛光刀具运动平台4沿Z轴运动,X向运动导轨3带动Z向运动导轨1与抛光刀具运动平台4沿X轴运动,强磁铁运动机构5与抛光刀具运动平台4共同作用产生垂直于XY面的动态磁场,微振动器6带动被抛光工件8产生椭圆振动。
如图2所示,抛光刀具运动台4包括:气浮主轴401、抛光刀具402和配重气缸403,配重气缸403安装在Z向运动导轨上1,气浮主轴401安装在配重气缸403上,抛光刀具402装卡在气浮主轴401上,气浮主轴401带动抛光刀具402绕Z向转动,配重气缸403用于平衡Z向的重力,减小气浮主轴401的负载。
如图3所示,抛光刀具402包括永久磁铁40201、铝制挡板40202和抛光刀体40203,永久磁铁40201安装在抛光刀体40203内部并用铝制挡板固定,铝制挡板用强力胶粘粘在抛光刀体40203上。
如图4所示,强磁铁运动机构5包括强磁铁501、底板502、滑动导轨503、伺服电机504、电机支撑板505、联轴器506、轴承座一507、滚珠丝杠508、精密滑台509和轴承座二510,电机支撑板505通过螺纹与底板502连接,伺服电机504通过螺纹连接与电机支撑板505连接,滑动导轨503通过螺纹连接与底板502连接,轴承座一507与轴承座二510通过螺纹连接与底板502连接,滚珠丝杠508通过联轴器506与伺服电机504连接并安装在轴承座一507与轴承座二510之间,精密滑台509安装在滚珠丝杠508与滑动导轨503上,强磁铁501安装在精密滑台509上。
如图5所示,微振动器6包括支持台601、微振动平台602、传感器装置一603和传感器装置二604,微振动平台602通过螺纹安装在支持台601上,传感器装置一603和传感器装置二604安装在微振动平台602上。
如图6、图7、图8和图9所示,微振动平台602包括X向振动装置60201、Y向振动装置60202、工作平台60203、解耦机构60204和微动装置框架60205,X向振动装置60201安装在工作平台60203上,Y向振动装置60202安装在工作平台60203上,四个解耦机构60204固定在微动装置框架60205上且相对于工作平台60203的X向与Y向输出轴线对称分布。
X向振动装置60201包括预紧螺钉一6020101、压电驱动器一6020102、刚性梁一6020103、位移传递块一6020104、位移传递块二6020105、柔性杠杆位移放大器一6020106、柔性杠杆位移放大器二6020107、连杆一6020108、连杆二6020109、柔性杠杆位移放大器三6020110、柔性杠杆位移放大器四6020111、位移传递快三6020112和位移传递快四6020113,压电驱动器一6020102通过预紧螺钉一6020101安装在刚性梁一6020103上,压电驱动器一6020102产生的X 向位移通过位移传递块一6020104和位移传递块二6020105传递给柔性杠杆位移放大器一6020106与柔性杠杆位移放大器二6020107,柔性杠杆位移放大器一6020106与柔性杠杆位移放大器二6020107用于放大压电驱动器一6020102产生的X 向位移,放大后的X 向位移通过连杆一6020108和连杆二6020109传递给柔性杠杆位移放大器三6020110、柔性杠杆位移放大器四6020111,柔性杠杆位移放大器三6020109和柔性杠杆位移放大器四6020110再次对X向位移放大并通过位移传递快三6020112和位移传递快四6020113传递给工作平台60203。
Y向振动装置60202包括预紧螺钉二6020201、压电驱动器二6020202、刚性梁二6020203、位移传递块五6020204、位移传递块六6020205、柔性杠杆位移放大器五6020206、柔性杠杆位移放大器六6020207、连杆三6020208、连杆四6020209、柔性杠杆位移放大器七6020210、柔性杠杆位移放大器八6020211、位移传递快五6020212和位移传递快六6020213,压电驱动器二6020202通过预紧螺钉二6020201安装在刚性梁二6020203上,压电驱动器二6020202产生的Y 向位移通过位移传递块五6020204和位移传递块六6020205传递给柔性杠杆位移放大器五6020206和柔性杠杆位移放大器六6020207,柔性杠杆位移放大器五6020206和柔性杠杆位移放大器六6020207用于放大压电驱动器一6020102产生的Y 向位移,放大后的Y 向位移通过连杆三6020208和连杆四6020209传递给柔性杠杆位移放大器七6020210和柔性杠杆位移放大器八6020211,柔性杠杆位移放大器七6020210和柔性杠杆位移放大器八6020211再次对Y向位移放大并通过位移传递快五6020212和位移传递快六6020213传递给工作平台60203。
解耦机构60204包括:解耦杠杆一6020401、解耦杠杆二6020402、解耦连杆一6020403和解耦连杆二6020404,解耦杠杆一6020401通过解耦连杆一6020403与工作平台60203连接,解耦杠杆二6020402通过解耦连杆二6020404与工作平台60203连接,解耦机构60204用于消除XY轴向的寄生位移,降低运动耦合,减少工作平台60203的运动误差。
传感器装置一603包括位移传感器一60301和位移传感器支架一60302,位移传感器一60301通过螺纹连接固定在位移传感器支架一60302上。
传感器装置二604包括位移传感器二60401和位移传感器支架二60402,位移传感器二60401通过螺纹连接固定在位移传感器支架二60402上。
位移传感器一与位移传感器二对二维振动轨迹进行实时在线测量。
分别对压电驱动器一6020102与压电驱动器二6020202输入如下的正弦电信号:
A
A
式中,a
X向正弦电信号A
如图10所示,通过调节输入正弦电信号的振幅A
如图11所示,基座7包括底座701和龙门架702,龙门架702连接于底座701上,基座7用于整个装置的安装与固定。
如图12所示,抛光杆402和强磁铁501二者保持转速和方向相同,在两个磁铁的相互作用下形成稳定的动态磁场,抛光杆402底部的磁流变液在动态磁场内发生流变效应形成磁簇B,底部带有磁簇B的抛光杆402在进行二维振动的光学元件8表面发生相对运动,实现对光学元件8的表面划痕与裂纹的有效去除。
一种用于加工微结构的振动辅助磁性磨料抛光的方法,包括下列步骤:
(一)、将具有微结构的被抛光工件固定在微振动平台的工作平台上,并保证微结构平行于X轴,Y向运动导轨带动微振动器和强磁铁运动机构Y轴运动到工作位置,Z向运动导轨带动抛光刀具运动台沿Z轴运动到工作位置,抛光刀具运动台带动抛光刀具旋转, 强磁铁运动机构中的强磁铁在强磁铁运动机构的带动下沿X轴往复运动,X向运动导轨带动Z向运动导轨与抛光刀具运动台沿X轴往复运动,并保证抛光刀具与强磁铁相对静止;
(二)、微振动平台中X向振动装置产生的X向位移与Y向振动装置产生的Y向位移在工作平台上合成为椭圆形运动轨迹,通过位移传感器一与位移传感器二对椭圆形运动轨迹进行实时在线测量,工作平台带动被抛光工件做椭圆振动;
(三)、抛光刀具中的永久磁铁与强磁铁运动机构中的强磁铁相互作用,在抛光刀具与强磁铁间产生垂直于XY面的平行磁场,该平行磁场随着抛光刀具与强磁铁沿X轴往复运动,形成均匀的动态磁场;
(四)、往被抛光工件喷洒磁性磨料,磁性磨料在动态磁场的作用下发生流变效应形成柔性磁性簇,柔性磁性簇附着在被抛光工件上,并在抛光刀具的带动下与进行椭圆振动的被抛光工件接触并产生相对运动,实现对被抛光工件的抛光;
(五)、直到全部被加工表面抛光完成,抛光过程结束。
- 一种用于微结构的振动辅助磁性磨料抛光装置及方法
- 超硬材料微结构表面的超声振动辅助抛光装置及其使用方法