用于运行驱动系统的方法及驱动系统
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及一种用于运行驱动系统的方法及驱动系统。
背景技术
业已公知的是,电机能以发电机方式或电动机方式运行,且因此如果在给电机供电的逆变器的直流电压侧的连接端上连接有电容器,那么在该连接端上电压在以发电机方式运行中升高。
发明内容
本发明基于的目的在于,安全地运行驱动系统。
按照本发明,该目的在用于运行驱动系统的方法方面根据在权利要求1中所述的特征解决,而在驱动系统方面根据在权利要求15中所述的特征解决。
在用于运行驱动系统的方法中,其中驱动系统具有整流器、至少一个带有电机的逆变器,本发明的重要特征在于,电机连接在逆变器的交流电压侧的连接端上;其中,逆变器的直流电压侧的连接端通过至少一个对于线路电感而言附加的电感//附加于线路电感的附加电感与整流器的直流电压侧的连接端连接;其中,在逆变器的直流电压侧的连接端上和/或在整流器的直流电压侧的连接端上连接有电容,特别是非极性的电容器、特别是薄膜电容器;其中,在逆变器的直流电压侧的连接端上和/或在整流器的直流电压侧的连接端上连接有由电阻和能驱控的半导体开关、亦即制动斩波器形成的串联电路;其中,制动斩波器在其运行的时长中以唯一的频率f运行,特别是该频率与由电感和/或电容形成的谐振回路的谐振频率间隔开。
在此有利的是,该频率可与驱动系统的谐振频率间隔开。由此可避免振荡的激励,且由此可安全地、特别是在电压方面安全地运行驱动系统。特别是如果多个逆变器共同地由一个直流电压电路、特别是中间电路供电,那么是有利的。在此重要的是,电感与电容配合以便形成具有谐振频率的装置。
在一个有利的设计方案中,检测给串联电路供电的电压、亦即中间电路电压、特别是在逆变器的直流电压侧的连接端上施加的电压。在此有利的是,制动斩波器的运行可与电压有关地实现。因此,制动斩波器的驱控信号可由控制电子器件产生,其中驱控信号一方面可根据中间电路电压产生而另一方面可根据能驱控的时间基础产生。
在一个有利的设计方案中,将检测到的电压值、亦即中间电路电压的值被数字化且作为数字串行数据流一方面传输给第一数字滤波器、特别是有限长单位冲激响应(FIR)滤波器,而另一方面传输给第二数字滤波器、特别是有限长单位冲激响应(FIR)滤波器;其中第二数字滤波器相对于第一数字滤波器以一时间差起动;特别是其中该时间差为滤波器长度的一半。在此有利的是,故障时间是可降低的,其方法是能以更快速的重复率分析处理数字数据流。
在一个有利的设计方案中,两个滤波器的输出信号分别被传输给比较机构,用以与第一阈值和第二阈值比较;其中比较机构的输出信号与由能驱控的时间基础、特别是能驱控的时钟发生器产生的信号逻辑关联,用以产生用于制动斩波器的驱控信号。在此有利的是,电压有关的条件可与时间有关的条件相联系。因此制动斩波器的驱控信号可如此产生,使得总是当中间电路电压位于在为此设定的值范围中时能以特别是唯一的固定的频率运行制动斩波器。遵循时间有关的条件确保:以频率的节奏接通制动斩波器,且以频率的节奏关断制动斩波器。运行在此总是在如下条件下:电压在设定的范围中,因为否则制动斩波器保持关断。
在一个有利的设计方案中,当中间电路电压低于阈值U2时总是关断制动斩波器。在此有利的是,中间电路电压因此不由制动斩波器引起地降低到意外低的值。
在一个有利的设计方案中,如果中间电路电压超过第一阈值U1,特别是且如果或者之前未发生接通或者在时间上之前最后发生的接通已经发生大于预定的时长T,那么接通制动斩波器,其中时长T等于频率f的倒数。在此有利的是,虽然在超过U1之后接通制动斩波器,然而仅仅当制动斩波器第一次或者在其运行中断之后又被时间有关地接通。中断在此但是必须已经持续长于频率的倒数且中间电路电压必须大于阈值U2。
在一个有利的设计方案中,第一阈值U1大于第二阈值U2。在此有利的是,U1用作接通阈值,而U2用作关断阈值。
在一个有利的设计方案中,在接通制动斩波器之后在特别是最晚如下时间间隔之后执行制动斩波器的关断,该时间间隔的值等于时长T与系数q的乘积(q×T);其中系数q的值在零与1之间,特别是来自在0.8与0.98之间的范围的值。
这相应于在周期T内制动斩波器的最大持续的接通。由此强迫进行强制关断。同样相应地也适用于相反的情况,从而如果之前最大地关断,那么强制接通。
在此有利的是,为了遵循频率在如下情况下也强制关断,即如果中间电路电压原本如此高,使得中间电路电压应被降低,亦即中间电路的能量应通过制动斩波器和串联连接的用作制动电阻的电阻转换为热量。因此虽然不利的是针对如此遵循频率来确认制动斩波器,然而因此却阻止谐振的激励。制动斩波器在此优选在调节边界上是可运行的。制动斩波器那么对于最大0.98×T接通,而0.02×T关断,而不是持续的接通。在调节储备/调节余量(Stellreserve)的该损耗考虑在制动电阻的规划/设计中且在实际中不是缺点!!!
在一个有利的设计方案中,时长T的倒数大于由电感和/或电容形成的谐振回路的谐振频率。在此有利的是,能实现该频率与谐振频率的间隔,特别是间隔谐振频率的值的40%以上。
在一个有利的设计方案中,如果在过去至少一次超过或达到接通阈值U1且中间电路电压U_ZK位于在U2之上,如果与在时间上之前执行的关断的时间间隔达到如下时间间隔,该时间间隔的值等于时长T与系数p的乘积(p×T),那么关断制动斩波器,其中系数p的值在零与1之间,特别是来自在0.8与0.98之间的范围的值。在此有利的是,及时关断制动斩波器,从而还遵循该频率。
在一个有利的设计方案中,如果在过去至少一次超过或达到接通阈值U1且中间电路电压U_ZK位于在U2之上,如果与在时间上之前执行的接通的时间间隔达到如下时间间隔,该时间间隔的值等于时长T与系数q的乘积(q×T),那么接通制动斩波器,其中系数q的值在零与1之间,特别是来自在0.8与0.98之间的范围的值。在此有利的是,及时接通制动斩波器,从而还遵循该频率。
在一个有利的设计方案中,系数q等于系数p。在此有利的是,接通频率和关断频率是相同的,且因此附加地不激励拍频(Schwebefrequenz)及其谐波。
在一个有利的设计方案中,检测到的电压值、亦即中间电路电压的值被数字化且作为数字串行数据流一方面传输给第一数字滤波器、特别是有限长单位冲激响应(FIR)滤波器,另一方面传输给第二数字滤波器、特别是有限长单位冲激响应(FIR)滤波器;其中第二数字滤波器相对于第一数字滤波器以一时间差起动;特别是其中该时间差为滤波器长度的一半。在此有利的是,可更快速地识别超过或低于阈值。
在一个有利的设计方案中,两个滤波器的输出信号分别被传输给比较机构,用以与第一和第二阈值比较;其中比较机构的输出信号与由能驱控的时间基础、特别是能驱控的时钟发生器产生的信号逻辑关联,用以产生用于制动斩波器的驱控信号。在此有利的是,电压有关的条件可与时间有关的条件相联系。
在用于实施上述方法的驱动系统中的重要特征在于,附加电感是线路电感的至少十倍、特别是至少一百倍。在此有利的是,谐振频率基本上与线路电感无关。通过这种方式,附加的电感可如此确定大小,使得谐振频率位于在预定的值范围中,且用于制动斩波器的运行的频率与该谐振频率足够大地间隔。
另外的优点由从属权利要求产生。本发明不限于各权利要求的特征组合。对于本领域内技术人员而言,权利要求和/或各个权利要求特征和/或说明书和/或附图的特征的另外的有意义的组合可能特别是由目的提出和/或通过与现有技术的比较而提出的目的产生。
附图说明
现在根据示意附图进一步阐明本发明。
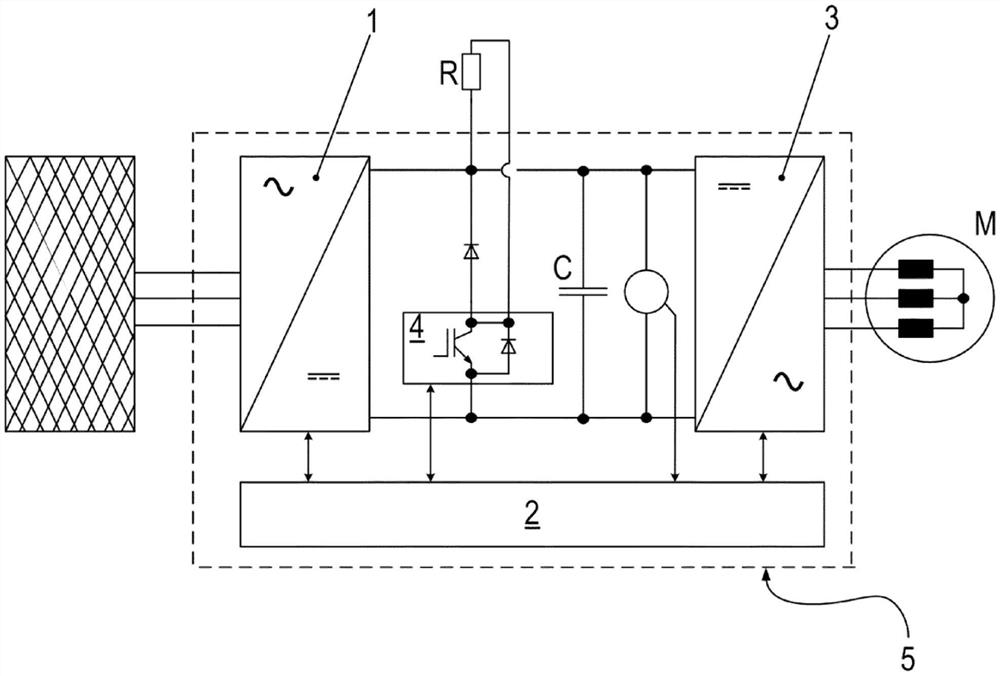
图1示意地描述带有制动斩波器的变流器的结构;
图2示意地描述按照本发明的驱动系统;
图3示出信号的与中间电路电压有关的产生;
图4示意地示出用于制动斩波器的驱控信号的根据信号实现的产生;
图5示出在不存在附加的中间电路电感L的情况下由线路电感和在中间电路侧的电容C_ZK形成的振荡回路。
具体实施方式
如图1所示,变流器具有整流器1,整流器1也可实现为支持反馈的整流器。在直流电压侧在整流器1上设有电容C,其自然仅仅实现为非极性的电容器,特别是实现为薄膜电容器。
检测在电容器C上施加的电压且将其传输给信号电子器件1,信号电子器件1产生用于在半桥中设置的、能驱控的半导体开关的驱控信号。
由逆变器的交流电压侧的连接端给电机M、特别是交流电机供电。
在电容器C上施加的电压传输给逆变器的直流电压侧的连接端。
为了保护以免在电容器C上过高的电压、亦即为了保护以免过高的中间电路电压,设有由制动电阻R和能驱控的半导体开关4组成的串联电路,其中同样设有续流二极管。
因此,利用这样的制动斩波器可将能量由中间电路借助于制动电阻、亦即基本上构成欧姆电阻的制动电阻转换为热量。通过这种方式可以避免过高的系统关键的电压值。
半导体开关4的驱控信号由信号电子器件2产生,此外也给信号电子器件传输给检测的中间电路电压值。
整流器1以其交流电压侧的连接端连接在交流电压供电电源上。
整流器1也可实现为支持反馈的AC/DC转换器。
如图2所示,按照本发明多个逆变器通过附加的电感L可连接在中间电路上,从而在由相应的逆变器20供电的电机、特别是交流电机的电动机式运行中从中间电路提取能量,而在发电机式运行中给中间电路传输给能量。
对于每个逆变器20也配置有带有制动电阻R的制动斩波器。
电容C_ZK可实现为非极性的电容器、特别是薄膜电容器。
为了带有多个逆变器的驱动系统的安全运行,但是仅仅唯一的制动电阻必须连接在一个逆变器上。另一逆变器的制动斩波器可以保持打开。
备选地,在每个逆变器20中在其相应的直流电压侧的连接端上各自连接有一个电容C_ZK,对于该电容各自并联连接有由相应的能驱控的半导体开关、特别是制动斩波器和电阻、特别是制动电阻组成的串联电路。
一方面,逆变器20的直流电压侧的连接端的上电位通过电感L与中间电路电压U_ZK的上电位连接。另一方面,逆变器20的直流电压侧的连接端的下电位通过电感L与中间电路电压U_ZK的下电位连接。
中间电路电压又利用电网供电的整流器21产生,在整流器21的直流电压侧的连接端上设置有非极性的电容器。
如在图5所示,如果附加的电感不存在,那么由此逆变器的电容C_ZK通过线路电感L_ZK连接。由此将由逆变器20将激励50引入驱动系统中,该激励50激励由电容C_ZK和线路电感L_ZK形成的振荡回路的振荡。
但是因为在图2中示出的电感L附加地存在,该电感L比中间电路的线路电感L_ZK大至少十倍,所以使得谐振频率由此达到设定的值范围,例如具有小于正好10%的偏差的2千赫兹。
按照本发明,制动斩波器以3千赫兹的频率、特别是在400V至500V的电网电压的情况下运行,从而制动斩波器不可以激励谐振回路的振荡。因为逆变器的能驱控的半导体开关的脉宽调制频率同样以在值范围之上的频率、特别是以4千赫兹、8千赫兹或16千赫兹运行,所以该逆变器也不可以激励谐振回路的振荡。
在较小的电网电压、如例如200伏特至240伏特的情况下,频率示例性地也可以选择为5千赫兹。
在图3和4中进一步阐明制动斩波器的运行方式和运行条件,其中图3示意地示出用于制动斩波器的驱控的电压有关的条件,而图4示意地示出用于制动斩波器的驱控的时间有关的条件。
如图3中所示,检测的和借助于Delta-Sigma转换器变换为串行数字数据流的中间电路电压传输给两个数字滤波器、特别是有限长单位冲激响应(FIR)滤波器,其相应的起动信号相互间在时间上偏差滤波器长度的一半Ta/2。起动信号由时间基础30产生,同步信号Sync发送给时间基础30。
数字滤波器31根据数字低通滤波的形式作用,特别是亦即具有与频率具有窗形关系的衰减强度。
滤波器31的输出信号分别被传输给相应的串行-并行转换器32,其数字并行输出信号分别被传输给相应的比较器33,比较器33比较输出信号、亦即检测的相应的电压值与第一阈值U1和第二阈值U2。
第一阈值U1相应于最小需要的电压,以便当之前关断制动斩波器的情况下引起接通。第二阈值U2标记如下电压,在低于该电压的情况下无论如何关断制动斩波器。
与第一阈值U1的比较结果分别在信号线路37上输出。
与第二阈值U2的比较结果分别在第二信号线路38上输出,第二信号线路38通至结合装置39。
在用于电压监控的机构34中检测:第一阈值U1是否大于零。假如不是,那么在负电压的探测中开始驱动系统的关断或者使得驱动系统达到安全状态。
为此,第一信号线路37由相应的比较器33分别通至相应的“与”连接35,其中连同第一阈值U1的监控的相应结果,亦即连同用于电压监控的机构34的输出信号以便在探测到负电压的情况下进行关断。
比较器33如此构成,使得比较器33在相应的比较中分别考虑滞后。
连接机构39将两个信号线路38上的两个信号结合为2比特信息,其作为BRC_Info被转发。在此那么将信息编码,即两个信号是否为零,或者两个信号中至少之一是否不为零,或者两个信号是否不为零。由此编码,即是否中间电路电压大于接通阈值、小于关断阈值或者位于在这两个阈值之间。
“与”连接35的输出信号同样如结合装置39的输出信号那样传输给信号发生器36。该用于信号产生的机构36因此提供上述信号BRC_Info和信号Ein_U_puls,使得在超过阈值U1时进行设置,而在低于阈值时进行复位。
通过根据图3具有半滤波时间的时间差的双重电压处理能实现更快速识别超过或低于阈值(U1、U2)。
如图4中所示,信号BRC_Info传输给时间基础/时基41,时间基础41的输出信号传输给连接机构42和43,连接机构42和43的输出信号传输给信号产生机构44。
通过这种方式,按照图3和图4考虑在产生用于制动斩波器的驱控信号BRC中考虑时间条件和电压条件。
一方面,如果电压位于在阈值U1之上,那么接通制动斩波器,如果电压位于在阈值U2之下,那么关断制动斩波器。
U2在此小于U1。
那么如果中间电路电压U_ZK由零升高,那么仅仅当超过U1的情况下接通制动斩波器。一旦低于U2,那么无论如何关断制动斩波器。在接通制动斩波器之后,在最晚时长q×T之后执行制动斩波器的关断,其中:时长T是对于制动斩波器预定的频率、特别是例如3千赫兹的倒数。系数q的值在零与1之间且在此优选较大地选择,例如系数q为0.95。
此外,如果在过去至少一次达到接通阈值U1且中间电路电压U_ZK还位于在U2之上,如果达到时长T——自从在时间上之前执行的关断过去该时长T——那么关断制动斩波器;如果在时间上之前执行的接通之后过去时长T,那么接通制动斩波器。
该电压条件和时间条件的效果在于,如果运行制动斩波器,那么无论如何以频率f=1/T运行制动斩波器。否则制动斩波器保持关断。
因此,以这种方式通过制动斩波器的运行不会激发在中间电路中不期望的振荡。
即使通过制动斩波器的最终的运行时长纯理论上在时间曲线的傅里叶分析中不同的频率不具有无穷小的幅度,然而在谐振频率下的能量输入太低,以便激励危险的或不期望的振荡。
在本发明中,有利地实现具有多个共同直流电压供电的逆变器的驱动系统的鲁棒运行以及避免谐振和谐振增大。此外可实现各构件的负荷的降低,因为降低中间电路电流的交流电压成分。此外,关于组合的当前中间电路电容的信息是不必要的。因此不必须各自单个地使得调节参数化。通过这种方式甚至能实现即插即用的实施方案。此外有利的是,事后还可接通逆变器,而无需系统的再次参数化。制动斩波器的滞后自动地通过所述调节正确地出现。但是此外也可实现制动电阻在不同位置的连接点。
附图标记列表:
1 整流器
2 信号电子器件
3 逆变器
4能驱控的开关,特别是制动斩波器
5 变流器
20 逆变器
21 整流器
30 时间基础
31 滤波器,特别是数字滤波器
32 串行-并行转换器
33 具有滞后的比较器
34 电压监控,用以在探测到负电压的情况下进行关断
35 与连接
36 信号产生
37 第一信号线路
38 第二信号线路
39 结合装置
40 电压有关的逻辑器件
41 能驱控的时间基础,特别是能驱控的计数器
42 结合装置
43 结合装置
44 信号产生机构
50 激励
Clk 时钟信号
BRC 用于能驱控的半导体开关、特别是制动斩波器的驱控信号
BRC_Info 用于时间基础41的输入信号
Ein_U_puls 接通信号
Aus_U_puls 关断信号
Sync同步信号
Load 充电信号
Koeff 系数
Data Clock 时钟信号
U1 接通阈值
U2 关断阈值
R 制动电阻
M 电机
C 电容器
L 电感
L_ZK 线路电感
C_ZK 相应逆变器的中间电路侧的电容
- 用于混合动力驱动系统的传动机构、混合动力驱动系统、车辆、用于运行混合动力驱动系统的方法、计算机程序和存储介质
- 用于车辆的驱动系统和用于运行驱动系统的方法和驱动系统的应用