继电器控制方法及其控制结构
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及电子控制领域,特别是涉及一种继电器控制方法。本发明还涉及一种继电器控制结构。
背景技术
继电器作为一种采用低电压微电流的输入来实现对输出端的高电压强电流控制的理想元器件。常随着低温潮湿的工作环境,造成触点表层附着冰层参考图1所示,造成两种不良控制效果:常开控制时,摆臂吸合过程触点接触不良;常闭控制时,摆臂释放过程触点粘连。
现有工业控制领域应用中继电器的连接方式参考图2所示,在系统组成上一般采用单片机作为控制单元,再通过三极管的通断实现对继电器摆臂的吸合和释放提供控制信号,其中单片机供电系统为低压+5V,继电器的输出端供电源电压为Vsup+,继电器的触点电压为Vsw。
针对继电器触点附着冰层接触不良的现行解决方法是:[1]继电器内部采用防水密封工艺手段,使其内腔空气中在生产出厂时就相对隔离外部低温潮湿工作环境;[2]利用类似于避免触点尖端电弧烧灼的电控方法,在单片机控制摆臂吸合或释放达到稳定之前,快速通断几次三极管使得继电器摆臂联动衔铁完成若干次对触点的敲击,达到清除触点表层异物的目的。这两种方法的缺点是,增加了生产工艺的难度和硬件成本,而电控策略以牺牲执行动作的时间为代价,造成继电器输出端响应的时效性较差。
本着以软件优化降低硬件成本和控制时效更高的原则,本发明旨在解决低温潮湿环境中的继电器吸合与释放及时响应电控信号的有效执行,和触点接触电路通断无异常的技术难点,并且利用控制方法的改善使继电器利用自身摆臂机械敲击动作或释放弹力清理附着冰层干扰。
发明内容
在发明内容部分中引入了一系列简化形式的概念,该简化形式的概念均为本领域现有技术简化,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
本发明要解决的技术问题是提供一种能通过控制信号实现低温潮湿环境中继电器触点除冰的继电器控制结构。
本发明要解决的另一技术问题是提供一种利用上述继电器控制结构能通过单片机控制信号实现低温潮湿环境中继电器触点除冰的继电器控制方法。
为解决上述技术问题,本发明提供的继电器控制结构,包括:
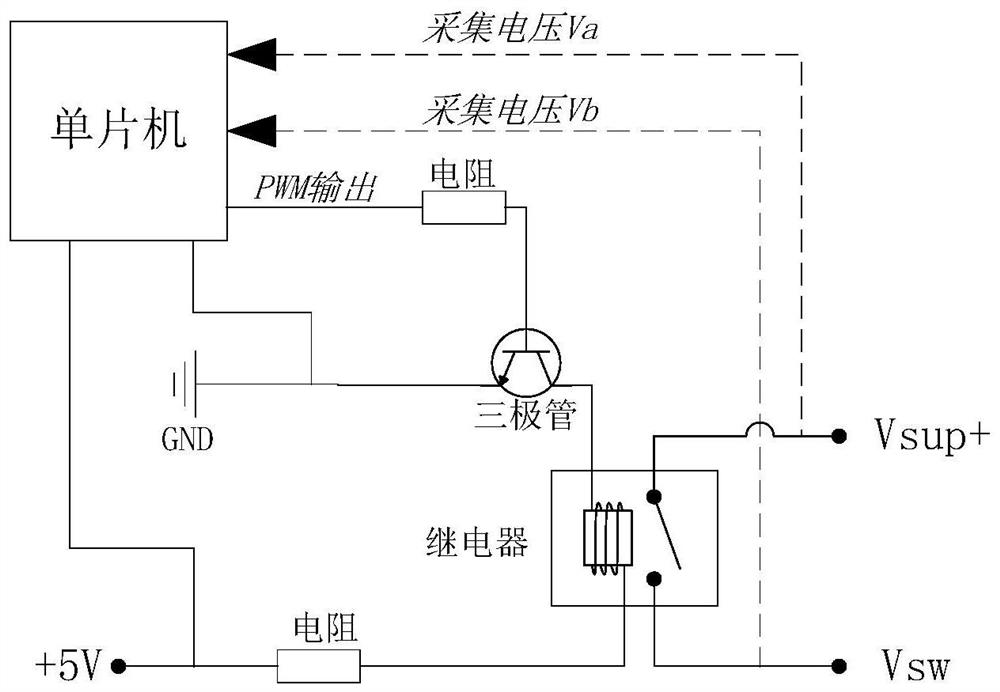
单片机,其采集继电器输出端供电源电压Va和继电器的触点电压Vb,其第一输出引脚经过第一电阻连接三极管基极,其第二输出引脚连接地和三极管发射极,其第三输出引脚连接电源并通过第二电阻连接继电器第二输入引脚;
三极管,其集电极连接继电器第一输入引脚。
为解决上述技术问题,本发明提供的继电器控制方法,包括以下步骤:
S1,驱动继电器执行吸合或断开动作,实时采集继电器输出端供电源电压和继电器的触点电压;
S2,延时诊断窗口后,根据继电器输出端供电源电压Va和继电器的触点电压V判断继电器吸合或断开动是否成功,若继电器吸合或断开动作成功则不执行除冰;
S3,除冰阶段,其驱动控制PWM信号为第一信号,其预设时长为第一时长,若发现继电器吸合或断开成功,则不执行后续除冰;
若继电器仍吸合失败,则将驱动控制PWM信号调整为占空比动态变化的第二信号;
若继电器仍释放失败,则将驱动控制PWM信号调整为占空比动态变化的第三信号;
若在除冰阶段内继电器吸合或断开成功,则立刻终止除冰发出吸合或断开成功标志;
S4,若经过除冰阶段继电器仍吸合或断开失败,则记录故障并报警。
可选择的,改进所述的继电器控制方法,实施步骤S2时,若驱动继电器执行吸合动作,且Vdiff<VT,则判断继电器当前状态为吸合成功,否则判断为吸合失败;
若驱动继电器执行断开动作,且Vdiff≥VT,则判断继电器当前状态为断开成功,否则判断为断开失败;
Vdiff=|Va-Vb|,VT为预设电压阈值。
可选择的,改进所述的继电器控制方法,实施步骤S3采用以下方式代替;
S3,除冰阶段,其驱动控制PWM信号为第一信号,其预设时长为第一时长,若发现继电器吸合或断开成功,则不执行后续除冰;
若自除冰阶段开始后的第二时长内发现继电器执行吸合或断开成功,则不执行后续除冰;
若第二时长后继电器仍吸合失败,则将除冰阶段剩余时间的驱动控制PWM信号调整占为空比动态变化的第二信号,第二信号持续第三时长;
若第二时长后继电器仍断开失败,则将除冰阶段剩余时间的驱动控制PWM信号调整占空比动态变化的第三信号,第三信号持续第三时长。
可选择的,改进所述的继电器控制方法,实施步骤S3采用以下方式代替;
S3,除冰阶段,其驱动控制PWM信号为第一信号,其预设时长为第一时长,若发现继电器吸合或断开成功,则不执行后续除冰;
若第二时长后继电器仍吸合失败,则将除冰阶段剩余时间的驱动控制PWM信号调整占空比动态变化的第二信号,第二信号持续第三时长;若在第三时长内发现继电器执行吸合成功则立刻终止除冰并发出吸合成功标志;
若第二时长后继电器仍断开失败,则将除冰阶段剩余时间的驱动控制PWM信号调整占空比动态变化的第三信号,第三信号持续第三时长;若在第三时长内发现继电器执行断开成功则立刻终止除冰并发出断开成功标志。
可选择的,改进所述的继电器控制方法,第二信号占空比动态变化的规则为:占空比按预设幅度逐渐减小;
第三信号占空比动态变化的规则为:占空比按预设幅度逐渐增大。
可选择的,改进所述的继电器控制方法,预设电压阈值范围为1V-2V。
可选择的,改进所述的继电器控制方法,诊断窗口时长范围为20ms-40ms。
可选择的,改进所述的继电器控制方法,第一信号的周期范围为50ms-150ms,占空比范围为40%-60%,第一时长范围为150ms-250ms。
可选择的,改进所述的继电器控制方法,第二时长范围为150ms-250ms。
可选择的,改进所述的继电器控制方法,第二信号的周期范围为40ms-60ms,占空比动态变化范围为80%-20%,第三时长范围为3s-7s。
可选择的,改进所述的继电器控制方法,第三信号的周期范围为40ms-60ms,占空比动态变化范围为20%-80%,第三时长范围为3s-7s。
本发明的工作原理说明如下:
采集继电器两路输出引脚两端电压作为反馈判断继电器当前状态判断是否继电器吸合或释放失败,基于单片机控制继电器输入引脚的驱动方式优化为可调占空比的PWM信号。其中,继电器两路输出引脚两端电压信号的采集主要通过单片机的ADC模数转换功能实现,在控制中判断继电器两路输出引脚两端电压的压差Vdiff是否小于吸合阈值Vp以满足控制闭合的条件;并采用PWM驱动方式将直接控制三极管的通断和调整占空比实现电磁线圈的功耗降低要求。
首先,对两路继电器输出引脚两端电压的采集的进一步说明:
1)继电器第一输出引脚C的电压经过分压电路处理,即与Vsup+之间必然存在压降,将其反馈至单片机电压采集引脚,经过ADC转换后获得电压信号值为Va;
2)继电器第二输出引脚D的电压经过分压电路处理,即与Vsw之间必然存在压降,将其反馈至单片机电压采集引脚,经过ADC转换后获得电压信号值为Vb;
3)计算以上两路信号的压差值Vdiff=|Va-Vb|,判断其是否小于预设阈值(比如1.5V),如果是,则认为继电器当前是吸合状态;如果否,则认为继电器当前是释放断开的状态。
上述采集两路继电器输出引脚两端电压的意义在于:可以将继电器的动作执行结果通过控制程序进行判断,为除冰策略的持续控制时间和执行原理提供依据,而且预设电压阈值范围的设定可以根据实际工况需求进行更改,从而达到较强的容错机制,降低继电器触点接触状态是否良好的误判率。
其次,对可调占空比的PWM信号控制原理说明:
假设驱动继电器输入引脚A相连的三极管时,采用周期为50ms,默认占空比为50%的PWM信号;
判断在经过延时窗口判断继电器吸合或释放失败时,进入除冰第一阶段,第一阶段PWM信号为50%占空比。若第一阶段除冰未成功则进入除冰第二阶段,PWM信号从占空比为80%开始逐步将占空比减小至20%(释放时的渐变趋势相反),即进入除冰第二阶段时空比是动态改变的;
除冰时,采用的占空比周期应当尽量取值大于摆臂的吸合往复机械行程总时间。
本发明的继电器驱动方式避免现行主流的电平高低驱动方式造成继电器的电磁线圈内的电流不能实时释放的缺陷,另外也可以降低线圈内部的热量集聚,延长继电器寿命。如果第一阶段程序判定继电器执行动作正常(即,吸合控制时Vdiff<1.5V;释放控制时Vdiff≥1.5V),可调的占空比所在的第二阶段将不执行,可认为触点除冰清理完成或已排除异物干扰触点触连需求。
本发明方法在应用适用范围也可扩展至沙尘雾霾恶劣环境中继电器工业应用领域。例如,汽车车身电子设备中的继电器应用广泛,随着车辆驶入我国北方高湿度沙尘频发的地区,在夜间室外低温下的继电器触点表层易附着冰层和粉尘等异物,当车辆次日进行冷启动时,极易发生继电器相关电气接触不良的控制异常。本发明为应对此类事故风险提供的继电器触点清理控制方法的实用性更强。本发明继电器可调PWM驱动控制方法能适应寒潮工况,确保了其执行吸合和释放动作的高效稳定性能。
附图说明
本发明附图旨在示出根据本发明的特定示例性实施例中所使用的方法、结构和/或材料的一般特性,对说明书中的描述进行补充。然而,本发明附图是未按比例绘制的示意图,因而可能未能够准确反映任何所给出的实施例的精确结构或性能特点,本发明附图不应当被解释为限定或限制由根据本发明的示例性实施例所涵盖的数值或属性的范围。下面结合附图与具体实施方式对本发明作进一步详细的说明:
图1是继电器触点附着冰层示意图。
图2是现有单片机控制继电器结构示意图。
图3是本发明继电器控制结构示意图。
图4是本发明继电器吸合动作除冰时序示意图。
图5是本发明继电器断开动作除冰时序示意图。
具体实施方式
以下通过特定的具体实施例说明本发明的实施方式,本领域技术人员可由本说明书所公开的内容充分地了解本发明的其他优点与技术效果。本发明还可以通过不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点加以应用,在没有背离发明总的设计思路下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。本发明下述示例性实施例可以多种不同的形式来实施,并且不应当被解释为只限于这里所阐述的具体实施例。应当理解的是,提供这些实施例是为了使得本发明的公开彻底且完整,并且将这些示例性具体实施例的技术方案充分传达给本领域技术人员。
第一实施例,如图3所示,本发明提供一种继电器控制结构,包括:
单片机,其采集继电器输出端供电源电压Va和继电器的触点电压Vb,其第一输出引脚经过第一电阻连接三极管基极,其第二输出引脚连接地和三极管发射极,其第三输出引脚连接电源并通过第二电阻连接继电器第二输入引脚;
三极管,其集电极连接继电器第一输入引脚。
上述第一实施例可以通过采集继电器输出端供电源电压Va和继电器的触点电压Vb判断继电器吸合或断开动是否成功,为除冰策略的持续控制时间和执行原理(占空比降低/升高)提供依据,从而达到较强的容错机制,降低继电器触点接触状态是否良好的误判率。上述第一实施例能避免现行主流的电平高低驱动方式造成继电器的电磁线圈内的电流不能实时释放的缺陷,另外也可以降低线圈内部的热量集聚,延长继电器寿命。
第二实施例,本发明提供一种用于所述继电器控制结构的继电器控制方法,包括以下步骤:
S1,驱动继电器执行吸合或断开动作,实时采集继电器输出端供电源电压和继电器的触点电压;
S2,延时诊断窗口后,根据继电器输出端供电源电压Va和继电器的触点电压判断继电器吸合或断开是否成功,若继电器吸合或断开成功则不执行除冰;
S3,除冰阶段,其驱动控制PWM信号为第一信号,其预设时长为第一时长,若发现继电器吸合或断开成功,则不执行后续除冰;
若继电器仍吸合失败,则将驱动控制PWM信号调整为占空比动态变化的第二信号;
若继电器仍释放失败,则将驱动控制PWM信号调整为占空比动态变化的第三信号;
若在除冰阶段内继电器吸合或断开成功,则立刻终止除冰发出吸合或断开成功标志;
S4,若经过除冰阶段继电器仍吸合或断开失败,则记录故障并报警;
其中,第二信号占空比动态变化的规则为:占空比按预设幅度逐渐减小;
第三信号占空比动态变化的规则为:占空比按预设幅度逐渐增大。
上述第二实施例可以通过采集继电器输出端供电源电压Va和继电器的触点电压Vb判断继电器吸合或断开是否成功,为除冰策略的持续控制时间和执行原理(占空比降低/升高)提供依据,从而达到较强的容错机制,降低继电器触点接触状态是否良好的误判率。再通过将驱动控制PWM信号调整为占空比动态变化的信号,针对性的对吸合或断开失败执行不同的控制策略,达到除冰效果上述第二实施例能避免现行主流的电平高低驱动方式造成继电器的电磁线圈内的电流不能实时释放的缺陷,另外也可以降低线圈内部的热量集聚,延长继电器寿命。
第三实施例,本发明提供一种用于所述继电器控制结构的继电器控制方法,包括以下步骤:
S1,驱动继电器执行吸合或断开动作,实时采集继电器输出端供电源电压和继电器的触点电压;
S2,延时诊断窗口后,根据继电器输出端供电源电压Va和继电器的触点电压判断继电器吸合或断开是否成功,若继电器吸合或断开成功则不执行除冰;若驱动继电器执行吸合动作,且Vdiff<VT,则判断继电器当前状态为吸合成功,否则判断为吸合失败;
若驱动继电器执行断开动作,且Vdiff≥VT,则判断继电器当前状态为断开成功,否则判断为断开失败;Vdiff=|Va-Vb|,VT为预设电压阈值;
S3,除冰阶段,其驱动控制PWM信号为第一信号,其预设时长为第一时长,若发现继电器吸合或断开成功,则不执行后续除冰;
若自除冰阶段开始后的第二时长内发现继电器执行吸合或断开成功,则不执行后续除冰;
若第二时长后继电器仍吸合失败,则将除冰阶段剩余时间的驱动控制PWM信号调整占为空比动态变化的第二信号,第二信号持续第三时长;
若第二时长后继电器仍断开失败,则将除冰阶段剩余时间的驱动控制PWM信号调整占空比动态变化的第三信号,第三信号持续第三时长;
S4,若经过除冰阶段继电器仍吸合或断开失败,则记录故障并报警。
第四实施例,本发明提供一种用于所述继电器控制结构的继电器控制方法,包括以下步骤:
S1,驱动继电器执行吸合或断开动作,实时采集继电器输出端供电源电压和继电器的触点电压;
S2,延时诊断窗口后,根据继电器输出端供电源电压Va和继电器的触点电压判断继电器吸合或断开是否成功,若继电器吸合或断开成功则不执行除冰;若驱动继电器执行吸合动作,且Vdiff<VT,则判断继电器当前状态为吸合成功,否则判断为吸合失败;
若驱动继电器执行断开动作,且Vdiff≥VT,则判断继电器当前状态为断开成功,否则判断为断开失败;Vdiff=|Va-Vb|,VT为预设电压阈值;
S3,除冰阶段,其驱动控制PWM信号为第一信号,其预设时长为第一时长,若发现继电器吸合或断开成功,则不执行后续除冰;
若第二时长后继电器仍吸合失败,则将除冰阶段剩余时间的驱动控制PWM信号调整占空比动态变化的第二信号,第二信号持续第三时长;若在第三时长内发现继电器执行吸合成功则立刻终止除冰并发出吸合成功标志;
若第二时长后继电器仍断开失败,则将除冰阶段剩余时间的驱动控制PWM信号调整占空比动态变化的第三信号,第三信号持续第三时长;若在第三时长内发现继电器执行断开成功则立刻终止除冰并发出断开成功标志;
S4,若经过除冰阶段继电器仍吸合或断开失败,则记录故障并报警。
可选择的,上述第四实施例中,各参数取值如下:
预设电压阈值范围为1V-2V,优选为:1.1V、1.2V、1.3V、1.4V、1.5V、1.6V、1.7V、1.8V或1.9V。
诊断窗口时长范围为20ms-40ms,优选为:30ms。
第一信号的周期范围为50ms-150ms,优选周期为:100ms;占空比范围为40%-60%,优选占空比为50%,第一时长范围为150ms-250ms,优选第一时长为200ms。
第二时长范围为150ms-250ms,优选为200ms。
第二信号的周期范围为40ms-60ms,优选周期为:50ms;占空比动态变化范围为80%-20%,优选每次变化幅度为1%-5%,每次时间变化间隔为5ms-10ms,第三时长范围为3s-7s,优选第三时长为5s。
第三信号的周期范围为40ms-60ms,优选周期为:50ms;占空比动态变化范围为20%-80%,优选每次变化幅度为1%-5%,每次时间变化间隔为5ms-10ms,第三时长范围为3s-7s,优选第三时长为5s。
如图4所示,将上述第四实施例结合时序图进一步说明,继电器吸合动作除冰控制;
a)从时刻Ta开始单片机驱动继电器执行吸合动作,(Vsw电压值因受冰层干扰,其电压曲线在图中以随机波动的曲线表示)程序不断采集两路继电器输出引脚电压以备其压差值与1.5V压差值比较。
b)在诊断窗口t1时间内,由于继电器的吸合动作的机械特性,存在触点端电压的抖动,此时程序对继电器的吸合成功与否不作断定,即a)中的压差值与1.5V的比较和判定在30ms后的时刻Tb处进行。
c)时刻Tb处,如果压差值<1.5V,则不执行后续t2,t3的除冰策略并置起继电器吸合成功标志(阴影底纹表示标志因除冰完成而被置起的可能发生时间区);如果压差值≥1.5V,则执行t2阶段的除冰策略,即将驱动输出PWM调整为周期100ms,占空比50%,持续200ms。
d)在第一除冰阶段t2时间内,如果压差值<1.5V,则不执行后续t3的除冰策略并置起继电器吸合成功标志;如果压差值≥1.5V,则执行t3阶段的除冰策略,即将驱动输出PWM调整为周期50ms,占空比可调递减(从80%至20%),持续5s。
e)在第二除冰阶段t3时间内,如果压差值<1.5V,则中止5s除冰策略的剩余时间并置起继电器吸合成功标志跳入后续t4阶段;如果压差值≥1.5V,则执行t3阶段的除冰策略直至时刻Td,此时仍未判定吸合成功,则程序记录继电器吸合严重故障并认定失败后报警,说明除冰策略仍未能清理造成触点隔离的异物。
如图5所示,将上述第四实施例结合时序图进一步说明,继电器断开动作除冰控制;
f)从时刻Ta开始单片机驱动继电器执行释放动作,(Vsw电压值因受冰层较久粘连,其电压初始时与Vsup+重合,冰层清理完成时间不确定,因此曲线在图中以随机波动的曲线表示)程序不断采集两路继电器输出引脚电压以备其压差值与1.5V压差值比较。
g)在诊断窗口t1时间内,由于继电器的释放动作的机械特性,此时如果不存在冰层粘连触点,那么释放瞬间也同样发生Vsw电压的抖动,因此程序对继电器的释放成功与否也不作断定,即a)中的压差值与1.5V的比较和判定在30ms后的时刻Tb处进行。
h)时刻Tb处,如果压差值≥1.5V,则不执行后续t2,t3的除冰策略并置起继电器释放成功标志(阴影底纹表示标志因除冰完成而被置起的可能发生的时间区);如果压差值<1.5V,则执行t2阶段的除冰策略,即将驱动输出PWM调整为周期100ms,占空比50%,持续200ms。
i)在第一除冰阶段t2时间内,如果压差值≥1.5V,则不执行后续t3的除冰策略并置起继电器释放成功标志;如果压差值<1.5V,则执行t3阶段的除冰策略,即将驱动输出PWM调整为周期50ms,占空比可调递增(从20%至80%),持续5s。
j)在第二除冰阶段t3时间内,如果压差值≥1.5V,则中止5s除冰策略的剩余时间并置起继电器释放成功标志跳入后续t4阶段;如果压差值<1.5V,则执行t3阶段的除冰策略直至时刻Td,此时仍未判定释放成功,则程序记录继电器释放严重故障并认定失败后报警,说明除冰策略仍未能清理造成触点粘连的异物。
除非另有定义,否则这里所使用的全部术语(包括技术术语和科学术语)都具有与本发明所属领域的普通技术人员通常理解的意思相同的意思。还将理解的是,除非这里明确定义,否则诸如在通用字典中定义的术语这类术语应当被解释为具有与它们在相关领域语境中的意思相一致的意思,而不以理想的或过于正式的含义加以解释。
以上通过具体实施方式和实施例对本发明进行了详细的说明,但这些并非构成对本发明的限制。在不脱离本发明原理的情况下,本领域的技术人员还可做出许多变形和改进,这些也应视为本发明的保护范围。
- 继电器控制方法及其控制结构
- 一种继电器控制结构