一种谐波减速器凸轮三波、四波发生器的廓形设计方法
文献发布时间:2023-06-19 10:16:30
技术领域
本发明涉及谐波减速器的设计与制造技术领域,特别是涉及谐波减速器主要部件-波发生器的三波、四波凸轮设计方法。
背景技术
谐波齿轮传动装置是由美国学者Musser于1955年基于薄壳弹性变形理论提出的齿轮传动装置,主要由柔轮、刚轮、波发生器3大部件组成,被广泛运用于工业、医疗、航空航天、核电等多个领域。波发生器是使柔轮产生连续变形波的构件,波发生器的型式不仅决定了谐波齿轮传动原始曲线的形状,而且对传动的啮合性能和柔轮强度也有重要影响。作为应用最广泛的波发生器,机械波发生器一般有触头型波发生器、行星式波发生器、圆盘式波发生、多滚轮式波发生器和凸轮式波发生器五种类型,而凸轮式波发生器因结构简单,可使柔轮和刚轮啮合状态更理想的优点,又在各个领域中运用得最多。凸轮式波发生器按其转动一圈使柔轮某点变形的循环次数又可分为双波、三波、四波发生器。
发明内容
本发明的目的在于推导出三波、四波凸轮发生器的理论轮廓坐标方程,通过求解波发生器角度几何关系与长度几何关系,将其转换为具体设计参数的函数。
为了实现上述目的,本发明采用的技术方案是:一种谐波减速器凸轮三波、四波发生器的廓形设计方法,该方法的实施流程如下:
S1、忽略柔性轴承,假设波发生器直接与柔轮装配使之产生弹性变形,波发生器设计需要满足两点:其一,要保证轮廓周长与柔轮内壁周长相等,在轮廓周长与柔轮内壁周长装配后既能紧密贴合,不会使柔轮内壁周长乃至中性层周长由于柔轮变形而发生变化。其二,波发生凸起部分区域使柔轮产生最大径向变形,其余部分区域使柔轮产生径向变形量小于最大径向变形。
S2、确定三波、四波发生器凸起圆弧的圆心角大小以及凸起圆弧之间的夹角大小。
S3、用不同于凸起圆弧半径的连接圆弧光滑连接各段凸轮圆弧。
S4、列出波发生器角度几何关系和长度几何关系方程式。
S5、通过S2设定控制的参数值大小,根据方程求解其余各个参数大小。
S6、根据所求各个参数计算各段圆弧相对于坐标原点的坐标方程表达式。
S7、检验设计凸轮是否满足要求。
所述S6具体还包括以下步骤:
计算第一段凸起圆弧的圆心坐标,再计算第一段凸起圆弧轮廓相对于圆心点的坐标表达式,将表达式转化为相对于坐标原点的坐标表达式。将凸起圆弧绕原点旋转,运用转轴公式得到其余凸起圆弧的轮廓坐标表达式;并获得连接圆弧的轮廓坐标表达式。
本发明所用柔轮内壁半径为24.1mm,波发生器提供给柔轮的最大径向变形量为0.27mm。
相对于现有技术,本发明的有益效果为:
本发明提出的三波、四波凸轮发生器的设计方法,直接推导出了平面凸轮轮廓方程。相对于双波凸轮发生器,谐波减速器工作时具有更大的啮合区域、更快的启动速度和更强的冲击负载承受能力,同时可通过改变设计参数凸起圆弧的圆心角大小来改变啮合区域的范围,改变凸起圆弧之间的夹角大小来改变啮合区域的位置。采用的技术方案对其他波数发生器和特定凸轮轮廓曲线也同样适用。
附图说明
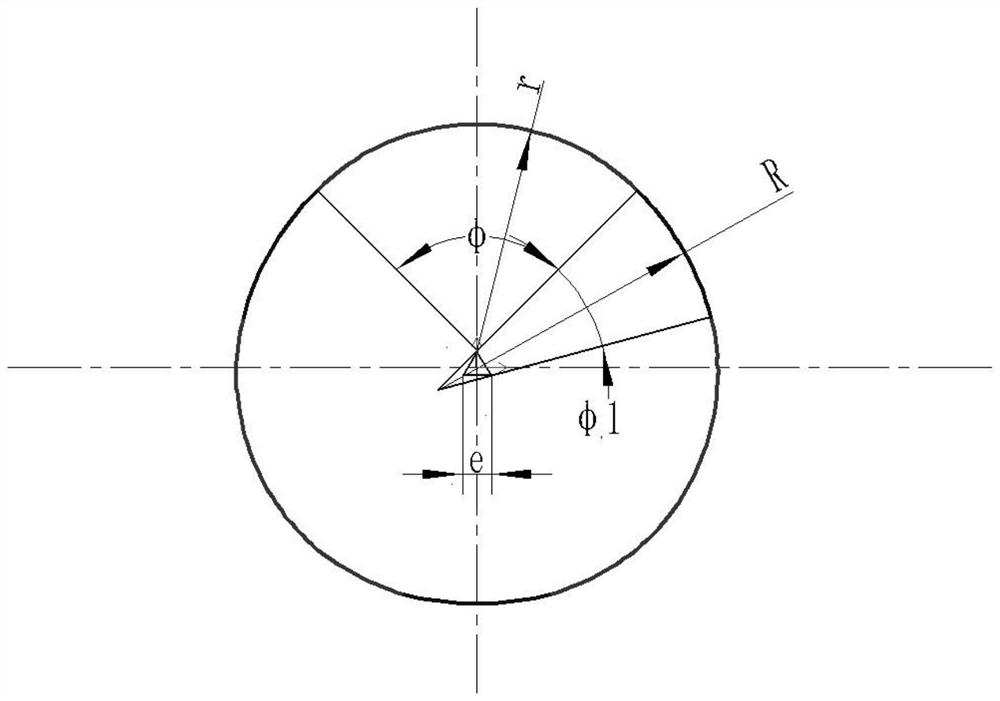
图1是三波凸轮发生器平面简图,三个半径为r的凸起圆弧用于在与柔轮装配时将柔轮撑开变形,而连接圆弧R用于依次光滑连接三段凸起圆弧。
图2是四波凸轮发生器平面简图,四个半径为r的圆弧分别位于坐标轴的四个象限,而连接圆弧R1和连接圆弧R2依次光滑连接四段圆弧r。
具体实施方式
下面结合附图对本发明作进一步说明。
1)如附图1所示:φ表示凸起圆弧圆心角,φ1表示连接圆弧圆心角(为方便计算,下文中所有角度均用弧度表示),r表示凸起圆弧半径,R表示连接圆弧半径,e表示三个凸起圆弧圆心的距离,三个凸起圆弧沿周向均匀分布。三波凸轮发生器的几何关系有:
由φ1>0可确定φ的取值范围为(0,2/3*π),假设φ值取为a,通过上述几何关系解得φ1=b,r=q,R=v,e=m。
位于第一、四象限红色凸起圆弧r圆心坐标为:
将第一个凸起圆弧绕原点旋转2/3*π得到第二个凸起圆弧,再旋转2/3*π得到第三个凸起圆弧,φ'表示φ角在区间[-a/2,a/2]变化,于是由转轴公式得到三个凸起圆弧r轮廓坐标关系为:
位于第一象限的蓝色连接圆R圆心坐标为:
φ1'表示φ1角在区间[0,b]变化,于是三个连接圆R轮廓坐标关系为:
2)如附图2所示:φ表示凸起圆弧圆心角,φ1表示蓝色连接圆弧圆心角,φ2表示两凸起圆弧之间的夹角,φ3表示黄色连接圆弧圆心角,r表示凸起圆弧半径,R1表示蓝色连接圆弧半径,R2表示黄色连接圆弧半径,e1表示一、四象限凸起圆弧圆心距离,e2表示一、二象限凸起圆弧圆心距离。四波凸轮发生器的几何关系有:
四波发生器的设计要保证在柔轮与刚轮增大啮合区域的同时作用效果类似于双波发生器,于是将φ2角控制在(0,20*π/180)之内,假设φ2为c,φ为a,则φ1=b,φ3=d,r=q,R1=v,R2=w,e1=m,e2=n。
第四象限的红色凸起圆弧r的圆心坐标为:
φ'表示φ角在区间[-a/2,a/2]变化,则四个象限圆弧r的轮廓坐标关系有:
连接第四象限和第一象限凸起圆弧的蓝色圆弧R1的圆心坐标为:
φ1'表示φ1角在区间[-b/2,b/2]变化,则两段连接圆弧R1轮廓坐标关系为:
第四象限圆弧r与第一象限连接圆弧R1交点处坐标为:
连接第一象限和第二象限圆弧的黄色圆弧R2的圆心坐标为:
φ3'表示φ3角在区间[-d/2,d/2]变化,则两段连接圆弧R2轮廓坐标关系为:
用matlab验证连接圆弧与原点坐标最大距离小于24.37,即
- 一种谐波减速器凸轮三波、四波发生器的廓形设计方法
- 一种改性波凸轮及其设计方法、波发生器和谐波减速器